
数据驱动的智慧实训室服务模式设计
2017-04-12 09:21:29黄丽芬黄大荣陈迪泉刘道敬
实验室研究与探索 2017年2期
黄丽芬, 黄大荣, 陈迪泉, 刘道敬
(1.广东行政职业学院,广州 510800; 2.重庆交通大学,重庆 400000;3.深圳键桥通讯技术股份有限公司,广东 深圳 518000; 4.广州工商学院,广州 510800)
数据驱动的智慧实训室服务模式设计
黄丽芬1, 黄大荣2, 陈迪泉3, 刘道敬4
(1.广东行政职业学院,广州 510800; 2.重庆交通大学,重庆 400000;3.深圳键桥通讯技术股份有限公司,广东 深圳 518000; 4.广州工商学院,广州 510800)

以智慧实训室感知层的建设为实践平台,将物联网服务与设备感知融合,提出一种基于数据驱动的、支持各感知设备直接感知控制的物联网智慧服务模式,实现以数据驱动感知,以感知实现服务。阐述了该模式中用到的数据驱动控制过程的新实现方法,详细描述了通信对象、数据驱动感知、控制以及智慧服务等概念的内涵,并结合高校校园应用实际给出了基于数据驱动智慧实训室服务模式的结构。介绍了通信对象封装、组地址、物理地址、通信对象服务器等概念及实现方法,深入讲解基于数据驱动的智慧感知模式设计与应用开发过程,阐述该模式下感知层节点设备之间的智能识别与智慧感知过程,并以实训室照明实例验证服务模式的无中心智慧识别功能。
智慧实训室; 数据驱动; 物联网服务模式; 通信对象; 智慧感知
0 引 言
物联网的感知和服务模式,即如何根据物理环境动态变化,自主感知、融合、控制各种设备上的信息,提供智能化的物联网服务,是物联网理论和技术的一个研究热点。目前已有许多学者关注于这方面的研究,尝试从感知内容、情境及交互机制等角度研究物联网智慧感知和服务模式[1-7]。李力行等[1]在前人面向服务的方法与物联网结合研究[2]的基础上,引入环境实体的概念表达各物体属性和行为,将物联网服务与环境实体交互,提出基于环境建模的物联网服务模型,将环境的感应性、适应性以及时间属性体现在物联网服务中。肖融等[3]提出基于传感内容的寻径模型,设计物联网内容组播和内容任播消息的信息传递方法,并根据内容敏感范围,设计了节点休眠机制,有利于实现感知信息的高效节能传播。文献[4-5]中均将情境因素引入建模过程,结合情境探讨信息获取、建模和智能处理等问题,研究建立基于情境感知的物联网系统结构模型。贾冰等[6]则从主动服务资源与用户需求间等级映射的角度提供物联网服务模式解决方案。田梅[7]将关联主义学习和情境感知的理论引入智慧图书馆的应用服务建模。这些研究多集中在对单独的应用层或感知层服务建模,离实现从感知到应用、按需提供的智能化物联网服务要求尚远。本研究将物联网服务与设备感知的融合,对物联网中的“物”进行标识、赋予物理属性和实质特性,运用智能接口,实现个体间的信息交换和通信,实现个体与信息网络的无缝整合。本文以智慧实训室的感知建设为实践平台,设计了一种基于数据驱动的智慧服务模式,实现以数据驱动感知,以感知实现服务,应用通信对象绑定、组地址、物理地址等的设计使感知层节点设备间能直接进行智能识别与智慧感知,各现场终端感知数据可直接触发某种应用功能,甚至完成某全局性的服务,实现智慧实训室的无中心智慧感知。
1 数据驱动的智慧服务模式描述
1.1 数据驱动的控制过程
1.1.1 数据驱动控制过程及传统实现方式
数据点是系统中的过程和控制变量,是数字化、信息化过程中关注的各种基本的数据信息单元,可以是各种数字I/O、模拟量I/O、字符串数据、日期参数、时间参数、配置属性参数、诊断数据或其他系统参数等。在传统的处理方案中,数据点都必须借助于各种信息采集器将系统中所有输入数据采集到一种称为主控制器的处理装置中,经过在主控制器中预先编写的控制算法和处理程序,将各种输入数据进行综合分析处理后,将处理结构再送到各种输出执行器中。在这里,信息采集器和输出执行器仅仅承担了数据的收集与输出功能,不能处理各数据点之间的逻辑关系[8-9]。
1.1.2 基于数据驱动的物联网系统控制过程新实现方式
根据设备需求来定义通信对象,用以存放协议中的数据点,同时将数据点间的逻辑关系进行封装绑定。对数据点类型进行了规范,并且引入通信对象、功能组、关联矩阵等概念,数据点之间的逻辑关系用功能服务来描述,功能服务与通信对象之间的关联关系通过组地址进行绑定。借助于运行在各节点设备中的通信对象服务器所提供的一套精简指令,读/写数据点的值,实现基于“数据驱动”的“全局事件”。
以EIB协议为例,在每一个节点设备中,根据该节点需要进行网络交互的信息内容,事先定义全局通信对象,通信对象的描述遵循EIS的交互规则。每个节点中可以定义一个或多个通信对象,并以对象表的方式对通信对象及其描述信息进行存储。如某智能节点定义了开关和调光功能,则需定义开关对象(1 bit)和调光对象(4 bit)。为实现通信和管理的需求,每一个对象都包含有自己的通信标记和描述信息。
1.2 数据驱动的智慧服务模式描述
1.2.1 通信对象的标示与识别
感知层所有感知设备直接联网,具有智能识别能力。单个设备数据在网络中交互时以通信对象的形式出现,设备的功能属性以对象属性的方式存在于设备数据中。包含对象的信息来源(或身份ID)、类型、名称、数值、工程量单位、量纲、精度等级等各种属性信息,统一编码,同时建立相应的解析服务体系,使对象信息的含义丰富、明确,具有智能识别能力。
1.2.2 数据驱动的感知和控制
一个智能终端由一个或几个通信对象构成,能直接对物理世界的信息进行智能识别和智慧控制,不需要另配控制器对现场采集信息进行综合分析与处理,直接实现基于数据驱动的全局服务功能。具体可根据需求设置数据驱动条件,通信对象值变化满足条件即发送数据帧,形成局部或全局的功能服务。各种控制策略与复杂算法处理功能通过设置条件或功能组绑定的方式下放到感知层的现场设备本身。末端的设备分为智能感知设备和智能执行设备两大类,感知和控制设备之间的关联与功能联动根据需求进行功能组绑定。
1.2.3 数据驱动智慧服务
数据驱动的智慧服务摒弃中心的思想,脱离区域控制器进行信息收集,每个终端设备可以通过网络直接交互。根据应用原子服务划分各式各样的功能服务模块,每种原子服务由一些独立的智能感知设备触发,直接驱动本功能组内的其他智能执行设备完成预定的应用服务,若干原子服务组合形成大型场景服务,各级别服务设置可在应用层集中更新。
图1所示为智慧实训室的感知服务结构图[10-13],在感知层主要包括各种环境感知、安防感知、RFID节点,各智慧节点根据预先设置的服务实现智慧感知和控制。以温度服务为例,温度感知节点定时感知温度,到达下限即发送感知数据控制空调节点,空调节点状态变化自动上报数据,至此完成温控子服务。
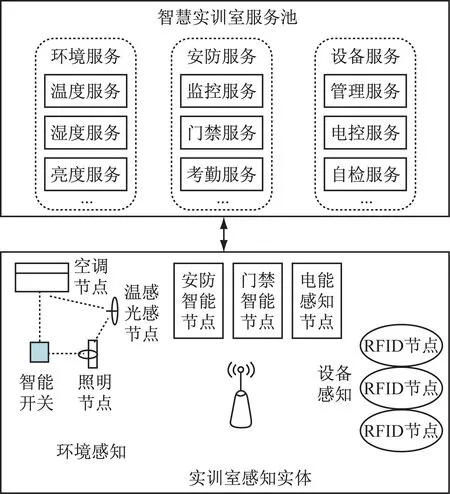
图1 智慧实训室感知服务结构图
2 数据驱动的智慧感知模式设计
2.1 通信对象的封装
物理世界感知数据的类型及属性丰富且复杂,数据的长度也不固定长度,这里引入全局通信对象的概念来解决设备感知信息存储和传输问题。通信对象是控制网络的通信主体。为了实现基于数据的全局通信功能,本设计采用KNX/EIB技术规范中对通信对象的定义与描述来进一步说明。即在通信对象定义时包含了数据指针、设置参数、数据类型说明、通信标记几个部分,并将数据指针、信息类型、数据类型3个部分封装成一个全局通信对象,3个部分各占1 byte。在通信对象描述结构中,首字节用于存放指向通信对象数据的指针,用于数据寻址,获得具体的数据值;次字节存放通信对象的属性设置信息,主要存储通信对象的通信标志位设置信息;末字节存放通信对象数据类型说明,主要存放所存储数据类型命令码及长度[13-14]。通信对象的标志位设置信息描述如表1所示。
通信对象(Comm_Object)的数据结构设计参考如下:
StructComm_Object
{

表1 通信对象的标志位设置信息描述
8_Bit_Unsined_int Number;/* Communication_Object_Number */
8_Bit_Unsined_int Data_Pointer;
typedef union {
byte Byte;
Struct {
byte CONFIGMARK0 :2; /* Transmit_Piority Bit 0 Bit1*/
byte CONFIGMARK2 :1; /* Communication Enable Flag Bit 2 */
byte CONFIGMARK3: 1; /* Read Enable Flag Bit 3 */
byte CONFIGMARK4: 1; /* Writer Enable Flag Bit 4 */
byte CONFIGMARK5: 1; /* Memory Type Flag Bit 5 */
byte CONFIGMARK6 :1; /* Transmit Enable Flag Bit 6 */
byte CONFIGMARK7 :1; /* Bit 7 */
} Bits;
} CONFIGMARKSTR;
8_Bit_Unsined_int Object_Type; /* 支持BooLean等 17种数据类型*/
typedef union {
byte Byte;
struct {
byte COMMARK0 :2; /* Transmission_Status Bit 0 Bit1*/
byte COMMARK2 :1; /* Read_request_Flag Bit 2 */
byte COMMARK3: 1; /* Update_Falg Bit 3 */
byte COMMARK4: 2; /* Transmission_Status Bit 4 Bit 5*/
byte COMMARK 6 :1; /* Read_request_Flag Bit 6 */
byte COMMARK 7 :1; /* Update_Falg Bit 7 */
} Bits;
} COMMARKSTR;
};
在上述结构中,把对通信对象的读、写等操作用1个8 bit的配置字节来描述,而对通信对象的通信管理用4个bit来描述,另外,单独用一个字节来描述通信对象的数据类型。为了兼顾不同通信对象数据类型不同所带来的通信对象值的存取访问问题,在通信对象的结构定义中采用1个8 bit的指针来解决。
2.2 物理地址与组地址
物理地址和组地址的引入用于确定设备和通信对象在物联网及功能服务中的逻辑关系。物理地址的定义是为了唯一标识某个具体的节点设备。物理地址由2 bit组成,用十进制表示为:XX.XX.XXX,最大值为15.15.255,分别代表智慧网络拓扑中的域、线和设备,具有唯一性[15]。物理地址主要服务于物联网设备的程序下载、组地址表下载、系统监控等功能。
组地址的应用通常表示在系统中定义的某项具体服务的编号,是按照一定标准设立的数据单元(即通信对象)、设备或所选功能的集合[15]。为了匹配和寻找该功能服务中的每个对象元素,使其协调配合完成既定的功能动作服务,引入了组地址的概念,通过标记该功能组编号的组地址报文来寻址。根据每个设备参与要实现的功能服务数,一个设备可能对应一个或多个组地址。以KNX/EIB协议为例,通过组地址某个EIB节点设备的访问寻址可直接定位在每个绑定的通信对象上,即,某个通信对象值的变化可以形成一个系统性的全局服务。
为了与物理地址的寻址兼容,组地址也采用2个字节表示(其中首位永远是0),有效的组地址是15 bit[15]。但组地址的分段不是表示所在网络的拓扑结构,而是表示节点设备在功能服务上所对应的逻辑区域。
根据需求,可以将组地址定义成2层或3层,将系统服务池中要实现的功能服务划分为主服务、子服务和中间服务。例如用第1段区分服务类别,第2段区分地域位置,第3段区分不同的设备或通信对象。故而不同的设备可以属于同一个组地址,同一个设备也可以同时被多个组地址进行管理。组地址的存在使得物联网子服务及多子服务并发容易实现。
2.3 通信对象服务器
通信对象是感知层的通信主体,它要求跨越设备地址进行寻址,直接在两个或多个通信对象主体(可以来自不同设备)之间进行信息交互,当某个通信对象的数据值发生变化时,立即通知相关的通信对象响应,配合完成预定的功能动作[13-16]。系统中功能服务动作的完成无需主控制器的参与,直接由每一个具体的通信对象发起或响应,每一个节点设备都是对等的,无主从之分,从而实现真正的分布智能。为此,在每一个节点设备中必须提供一套支持通信对象全局通信的精简指令系统,这就是常说的通信对象服务器。
在通信对象服务器中必须实现每个节点设备中所含通信对象的管理与任务调度。如:查询通信对象表中当前通信对象的状态、读/写通信对象表中通信对象的值、通信对象与组地址的绑定处理等。图2所示为通信对象的操作管理流程图。
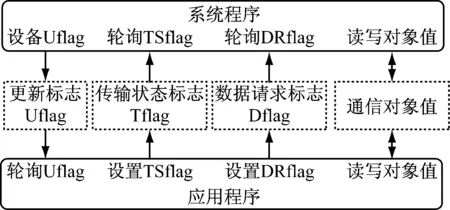
图2 通信对象操作管理流程图
为了实现基于通信对象的分布智能通信,在每个节点设备中通信对象服务器必须实现具体的服务功能。表2所示为定义的通信对象常见功能。
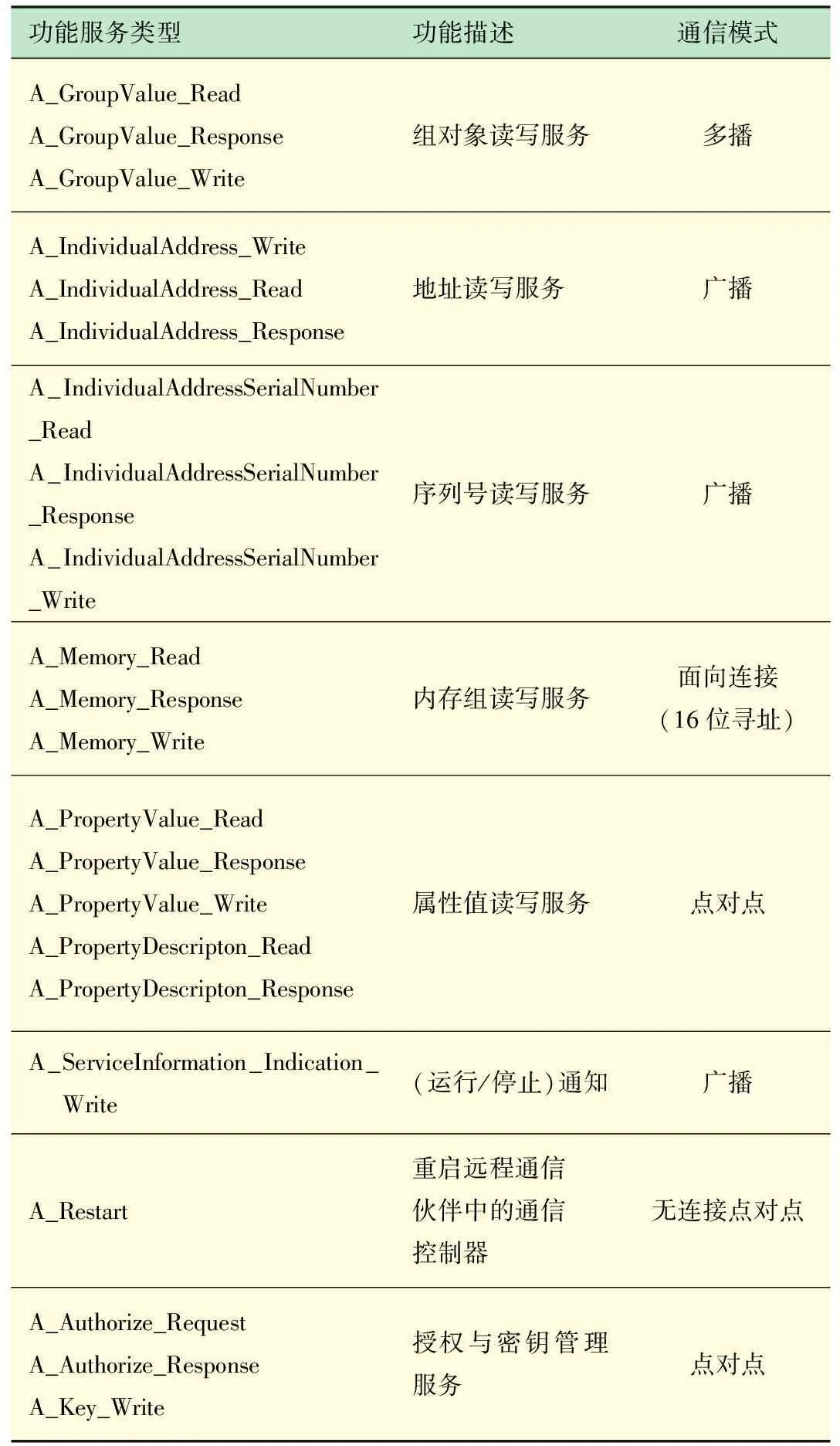
表2 通信对象服务器中实现的常见功能表
2.4 数据驱动的智慧感知过程和应用开发
将实训室各种控制需求,如照明、安防、场景等进行抽象,提出数据点、定义子服务/服务等。服务是指完成某一系列功能动作的联合体,由一个或多个设备联合完成,是发送和接收数据点的集合。如开/关某回路灯、开/关某区域灯、温控某区域、以某个输入条件开/关某些设备等。要实现这些功能服务,必须要有多个通信对象同时参与。一个发出操作指令的通信对象称为发送对象,而这些被控制的另一些通信对象被称为接收对象。一个接收对象可以从多个功能服务组地址接收信息,如一盏灯可以连接到不同的组地址,处于不同的场景中。一个发送通信对象只能通过一个单独的组地址发送,比如在某服务的场景控制中,一个开关传感器只能通过一个组地址来发送控制命令。
通信设备间的智慧感知和联动过程是通过关联通信对象与功能组来实现的,即在定义关联表和关联矩阵来描述对象表、组地址表之间的关联关系。发送对象因动作、值更新或其他触发条件满足形成数据帧发送过程,查询关联表绑定组地址,发送带组地址的数据帧,该功能组相关的通信对象节点将自动响应,修改通信对象的通信状态,刷新通信对象当前状态和值,配合完成所定义的功能动作。据此,某一节点的数据变化可直接驱动产生全局功能服务,自主触发其他预定义的关联动作,无需上一层控制器参与,即可实现各智能感知节点之间的智能识别和智慧感知功能。在上位机配置管理系统中可以将组地址表和关联表下载到相应的智能节点中,实现对网络内节点功能的智能配置。根据具体的项目需求分析,设计并定义功能组,并识别各节点的通信对象,分配各节点参与的功能动作,完成功能组与节点中具体通信对象的绑定设计,完成功能组与通信对象的关联配置。
在基于数据驱动的智慧感知模式设计中,没有主控制器的概念,每一个感知终端节点都是一个控制指令下达单元或执行单元,都可自主触发一个全局的功能动作,而不用编程。每一个具体节点设备的故障只影响该节点本身对应的执行功能,不会影响其他系统的功能服务实现,具有很高的可靠性。完成设备的系统开发后,感知设备实现应用开发相对简单,实施步骤具体如下:
(1) 通信对象物理地址定义与下载。物理地址的定义主要解决网络的拓扑结构定义和各终端节点设备之间通信的物理路由,为基于通信对象的通信创造前提条件。下载操作主要解决厂家应用程序(如通信对象服务器程序、通信对象需执行的应用功能的简单处理程序等)和初始化参数的下载等。
(2) 功能定义与组地址规划。根据具体项目要实现的服务目标,对系统的所有功能服务进行疏理,按功能动作的配合实施要求和管理需要,将功能服务划分层次,标识每项具体功能动作执行所涉及的设备节点或通信对象,进行组地址规划,将具体功能与通信对象进行关联。
(3) 通信对象与组地址的绑定。通过上层配置管理软件设置,将通信对象与功能组进行关联,通过组地址进行绑定,完成关联方案。然后将关联绑定结果——组地址表和关联表下载到对应的终端节点设备中,实现具体通信对象与功能服务的绑定。
(4) 数据驱动与全局服务事件。在系统运行中,各终端节点设备在自身通信对象服务器的管理下,会自动查询本节点中的通信对象表、地址表、关联表、通信对象状态表,对通信对象值的读/写进行自动处理,实时地刷新通信对象的当前值,并将通信对象值的变化应引起的功能动作指令下达给相关的通信对象配合执行,实现基于数据驱动的全局服务事件,使系统的各项服务在没有主控制器的参与下自动完成。
3 应用举例
这里以智慧实训室照明子系统的应用为例,通信协议是EIB协议,定义有一个开关节点设备、两个被控灯具设备。通过全局通信对象的交互和功能绑定操作来实现智慧交互功能过程描述如下:
开关节点定义开关对象(物理地址为0x0A0B),灯具设备节点定义两个灯具对象,设计两个控制场景组地址:0x0001(控制灯1),0x0002(控制灯2),设置物理地址和定义功能组并下载。
开关节点按下“开”动作经逐层封装由对象服务器轮询并最终发送出EIB协议数据帧如下:
BC 0A 0B 00 02 E2 00 80 01 2F
含义为从开关节点发送0x01(开关对象值“开”)到组地址为0x0002的节点设备。
通过组地址关联到的节点设备在接收到数据帧后,对象服务器操作并逐层解析,先获得组地址0x0002信息,然后根据节点内部的关联表查询到与该组地址绑定的接收对象,根据组地址绑定到被控灯具2,判断关联条件是否满足,最后灯具2做出保存对象值操作并触发“开”动作,对象值更新后自动反馈数据帧:BC 00 02 0A 0B 78 E5 61 01 FB 。图3所示为数据帧发送情况监测。
系统功能服务一经定义、下载、绑定,通信对象节点的信息发送和接收过程均自主处理,无须服务中心干预,满足系统对于智能识别和智慧感知的要求。详细功能设计时,还可根据具体场景特征进一步拓展设计(如:通过设置光度传感器上限/下限值来智慧感知控制区域灯光场景),定义更完善的功能组关联矩阵来实现各感知对象之间更复杂的服务关系,使实训室感知系统具备更加智慧的数据感知和处理能力。
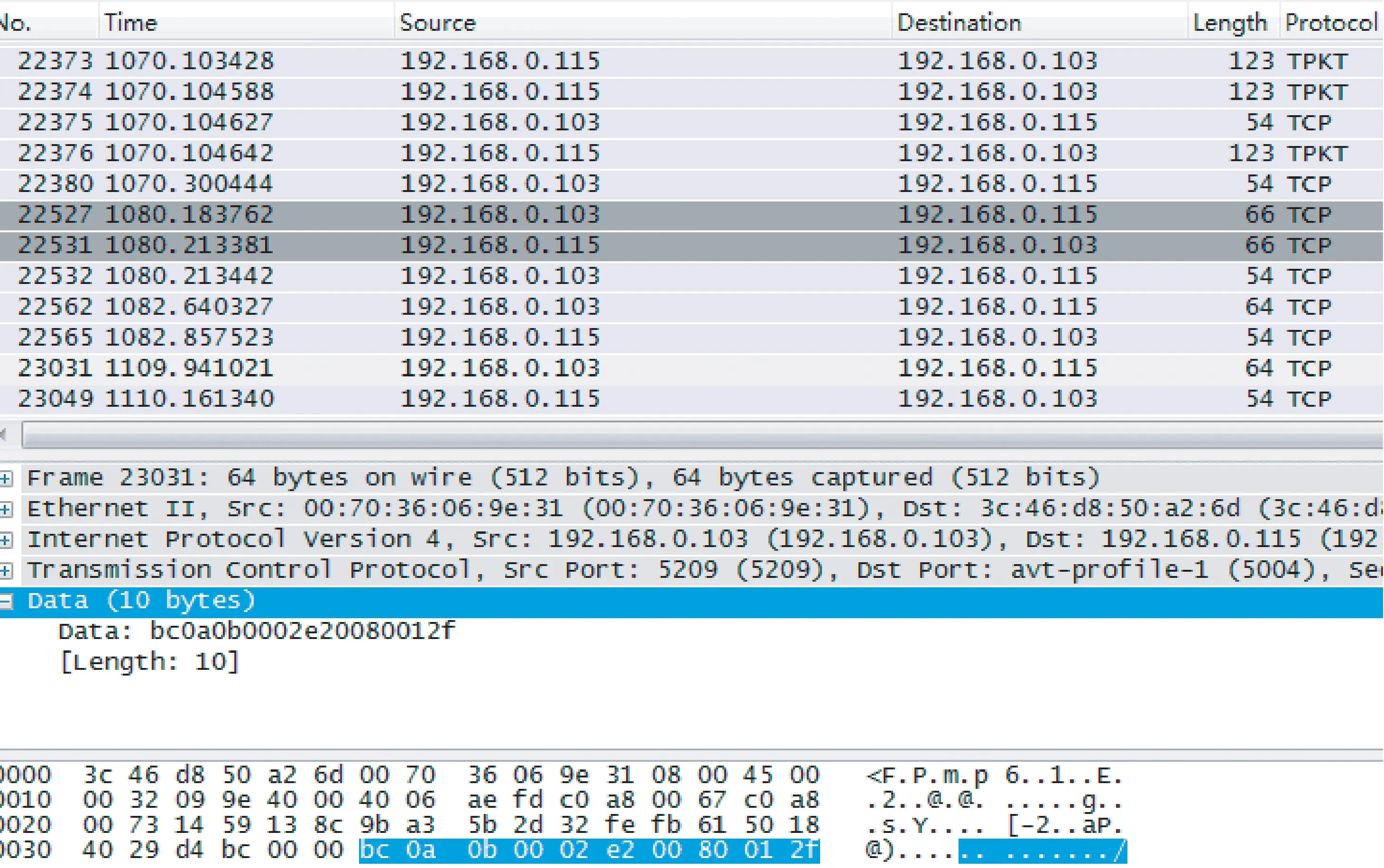
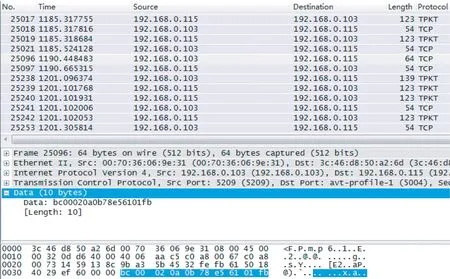
图3 数据帧传输情况监测
[1] 李力行.基于时间自动机的物联网服务建模和验证[J].计算机学报,2011,34(8):1365-1377.
[2] Souza L, Spiess P, Guinard D,etal. SOCRADES: A Web service based shop floor integration infrastructure[C]// Proceeding of the Internret of Things.2008(IOT’08).Zurich, Switzerland, 2008:50-67.
[3] 肖 融,孙 波,陈文龙,等.基于内容的物联网寻径模型及节点休眠机制[J]. 计算机学报,2014,37(10):2165-2175.
[4] 童恩栋.物联网情景感知技术研究[J].计算机科学,2011,38(4):9-14.
[5] 郭树行,张 禹,王 坚. 基于情景演算的物联网访问控制模型[J]. 中南大学学报(自然科学版),2013,44(1):176-180.
[6] 贾 冰等. 基于物联网的主动服务资源选择方法[J]. 华中科技大学学报(自然科学版),2012,40(I):47-50.
[7] 田 梅.基于关联主义学习理论的智慧图书馆服务模式构建[J].图书馆学研究,2014(19):64-67,46.
[8] 候忠生,许建新.数据驱动控制理论及方法的回顾和展望[J].计算机学报,2009,35(6):650-656.
[9] 王 宏.认识基于数据驱动的工业过程控制[J]. 控制工程,2013,20(2):197-200.
[10] 顾晶晶,陈松灿,庄 毅.基于无线传感器网络拓扑结构的物联网定位模型[J].计算机学报,2010,33(9):1548-1556.
[11] 张捍东,朱 林.物联网中的RFID技术及物联网的构建[J]. 计算机技术与发展,2011,21(5):56-59.
[12] 杨 峰, 朱 凯, 徐昕军等. 面向物联网的室内ZigBee监控系统设计[J].计算机测量与控制,2014,22(5):1439-1445.
[13] 陈迪泉,黄丽芬.谈物联网感知层的技术特征与实现方法[J]. 智能建筑,2012(9):68-72,75.
[14] GB/T 20965—2013控制网络HBES技术规范——住宅和楼宇控制系统[S].
[15] 姚 帅. knx/eib总线设备的开发和bcu通信内核的研究[D].杭州:浙江大学,2007.
[16] 徐艳萍. KNX/EIB协议栈的研究与实现[D].合肥:合肥工业大学,2014.
Designing and Study the Service Model of Smart Training Room Based on Data Driven
HUANGLifen1,HUANGDarong2,CHENDiquan3,LIUDaojing4
(1.Guangdong Vocational Institute of Public Administration, Guangzhou 510800, China; 2. Chongqing Jiaotong University, Chongqing 400000, China; 3. Shenzhen Keybridge Communications Co., Ltd., Shenzhen 518000, Gungdong, China; 4. Guangzhou College of Technology and Business, Guangzhou 510800, China)
With the practical platform of smart training room, integrating service of IOT (Internet of Things) and equipment perception, the service model of smart training room based on data driven is provided to achieve data driven perception and service, it supports all kinds of devices and senses and controls these devices. Firstly, a new realization of data driven control process used in this model is introduced. Then, the concepts of communication object, data driven sense and control, intelligent service are described in detail, and the structure of smart training room service model based on data driven is provided combined with the reality of campus. Secondly, based on the concept and realization of communication object encapsulation group address, physical address, and communication object services are introduced, the design and application development progress of this model are explained, and the progress of intelligent recognition and smart sense between devices from sensing layer are described. At last, the training room lighting system is taken as an example to validate the smart recognition and the function provided by this service model.
smart training room; data driven; IOT service model; intelligent recognition
2016-05-09
国家自然科学基金(61004118,61304104);重庆市高等学校优秀人才支持计划(2014-18);2015年广东省普通高校青年创新人才项目(自然科学)(2015KQNCX195);2015年广东省高职教育教学管理委员会教改课题(JGW2015010);重庆市研究生教改重点项目(yjg152011);重庆市高等教育科学研究课题(CQGJ15010C)
黄丽芬(1982-),女,安徽桐城人,硕士,实验师,研究方向:物联网技术,计算机应用技术。
Tel.:18933990826;E-mail:114645808@qq.com
TP 393
A
1006-7167(2017)02-0125-06
猜你喜欢
睿士(2023年2期)2023-03-02 02:01:09
党的生活(黑龙江)(2022年4期)2022-04-25 22:14:17
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
通信世界(2018年27期)2018-10-16 09:02:56
意林(2018年3期)2018-03-02 15:17:24
厦门理工学院学报(2016年1期)2016-12-01 04:50:48
通信电源技术(2016年1期)2016-04-16 04:57:31
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:48
