桥梁净空高度实时检测与综合报告系统及其应用
2017-04-12 05:11郭义浩
水道港口 2017年1期
郭义浩
(长江重庆航运工程勘察设计院,重庆401147)
桥梁净空高度实时检测与综合报告系统及其应用
郭义浩
(长江重庆航运工程勘察设计院,重庆401147)
根据现行的规范和标准,桥梁净空高度主要依据航道等级和相应设计最高通航水位确定。考虑到汛期河流水位的频繁变化以及通行船舶空载高度的不统一,存在着船舶碰撞桥梁的风险。文章结合目前我国桥梁净空高度及船舶现状,在分析快速检测和船舶能及时接收的基础上,提出了一种桥梁净空高度的实时自动检测与综合报告系统,并获得国家专利。该测报系统简单易实施,可有效施行净空高度的预警,大大降低船撞桥事故风险,并可在各河流的通航上推广。
桥梁;净空高度;船撞桥;风险;自动测报
现代经济社会的发展,导致各种安全风险因数的增多是必然规律,关键是要有防范安全风险的措施才能保证我们享受现代社会发展的成果。随着我国交通运输建设的快速发展,桥梁建设方兴未艾,数量不断增加,航运的发展船舶不断大型化,同时由于自然条件的变化,有些桥梁的最高通航水位也发生了变化,这些因素都使得桥梁设计净高原因的通航安全的风险不断累积增加,因净高问题撞桥事故也时有发生。很有必要采取相应的防范措施,降低因净高原因导致的安全风险,使桥梁通航不断趋于安全,对我国桥梁和航行船舶安全都具有十分重大的意义。
桥梁的净空高度是通航桥孔的一项主要技术参数,它影响到桥区船舶的通过能力和通航安全。据调查,在我国已建成的桥梁中,桥孔通航净高不富裕、或接近国家规定标准临界值或不满足净高要求等情况均普遍存在。加之我国船舶种类繁多,多年来倡导的船舶标准化也未能完全实现。每当汛期到来,水位较高且变幅较大,即通航净高值处于临界的时候,极易发生船撞桥事故。原因是船舶通过桥梁时往往不清楚桥梁通航净高的实际值,也无法在短时间内判断自身高度与桥梁通航净空高度的关系。因此,建立一种精确和便捷的桥梁净高实时检测系统并进行综合报告,在净空高度达不到标准时及时报警,使得船舶提前获知净空高度信息,及时做出合理的判断,对降低事故风险,保障船舶和桥梁安全意义重大。
1 研究现状
1.1 国内外针对船舶超高造成的桥梁碰撞的防治研究
鉴于船舶与桥梁碰撞的严重性、破坏性、多面性,我国桥梁安全逐步受到重视,基于此的研究也越来越深入、系统、全面。针对船舶超高造成的桥梁碰撞的防治研究主要在以下几方面:
(1)在桥梁前方增加防护横梁的保护装置[1],防止超高船舶撞击,一般适用于通航等级较低的小型桥梁,费用较高;
(2)通过在桥面安装光电探测仪器检测超高船舶,从而报警。但此种手段受雨雪雾等天气的影响,可靠性难以保证,而且随着桥面的震动,探测仪器安装基面发生变化,探测误差大。
(3)桥梁上安装CCTV工业电视监控设备,但此种设备装置由于是视屏装置,受天气条件影响大,对船舶超高状况难以准确判断,而且需要配置人员24 h不间断的人工观察,实际效果不佳。
以上方式都是被动防撞,存在较大的局限性,效果受限。实际上现在船舶趋于大型化,即使是长江等内河船舶,5 000 t乃至万吨级船舶也不鲜见,沿海桥梁通过的船舶更大,仅仅靠被动防撞是不能解决问题的。不难发现,主动防撞比起被动防撞能更多的提供船舶所需信息,更重视船与桥的互联性,让船舶驾驶人员感知桥梁的实际净空高度,更能从根本上减少船撞桥事故,是一种理想的方式。
目前针对桥梁净空高度的实时检测与净高综合报告系统仍处于空白。鉴于此,提出一种自动实时检测桥梁通航净高并对净高信息进行综合报告的系统,从根本上主动避免船撞桥事故的发生是非常必要的。
1.2 目前桥梁净空高度测报的一般方法
目前桥梁净空高度测量的方法有:三角高程测量法、水尺法和视觉目测法。上述方法具有一定的实用价值,但是在测报精度和测报的便捷性方面存在不足。有学者在总结分析上述方法的基础上,针对船舶航行经过桥梁的实际特点,提出了一种基于标定物的高度测量方法[2]。该方法以双目视觉为基础,结合标定点的信息,船舶的位置信息,利用空间几何关系,计算得到船舶的高度。而大型桥梁净空高度的测量方法,可使用GPS网络RTK技术结合全站仪精密三角高程测量技术实时得到桥面点高程,经桥梁横坡、桥梁厚度及检修轨道梁改正后得到轨道梁底的高程,再与实时水面高程相减得到相应点的净空高度,但是由于存在诸多限制条件,航行船舶要精确测量桥梁的净空高度是十分困难的。
2 净空高度实时检测的必要性
以长江为例,其干线桥梁净空高度存在以下问题:
(1)不少早期桥梁的通航净高不能满足目前规范和通行船舶的净高要求,如《通航海轮桥梁通航标准》颁布后部分内河船舶不能满足海轮通航的净高要求;武汉长江大桥、南京长江大桥等早期桥梁净空高度也不富裕;还有部分桥梁由于水库蓄水或最高洪水位发生变化从而引起通航净空高度改变。桥梁通航净高的确定取决于计算出的最高通航水位,而实际确定的净高尺度还往往与建桥条件有关。因此,在实际建成的桥梁中,普遍存在通航净高取值处于《内河通航标准》允许的下限值的情况,净空高度参差不齐。
(2)部分船舶的实际高度超过代表船型的高度。我国内河运输的快速发展已经形成较为开放的运输格局,船舶跨越航道等级航行已呈常态。以长江为例,下游船舶可驶入长江上、中游干线或支流航行,进江海轮也可驶入中游的武汉甚至以上河段,这就导致船舶的净高超过设计航道等级的代表船型净高。这类船舶只能在长江水位较低或桥梁实际净高较富裕的情况下通过,或通过压载通过,但随水位上涨,撞桥的风险就凸显出来。
例如,武汉、南京长江大桥建成以来均数十次被撞击,对桥梁结构和船舶自生安全造成严重影响;2014年6月7日,某多用途船总吨1 493 t满载吃水高度13.5 m,准备通过净高只有11 m扬州夹江大桥,幸被海事部门及时拦截制止,从而避免了一起事故的发生,否则后果不堪设想。
(3)桥梁净空高度不能实时检测和显示,存在船撞桥风险。由于现行桥梁大多没有通航净高的实时显示系统,受季节交替、降水、上游水库调节、潮汐等影响航道水位又处于随时变化之中,船舶对潜在的净空高度不够的危险不能感知预警,造成通航安全的重大隐患。例如,长江上游河段汛期水位涨落幅度大,一天内水位可陡涨10 m以上,桥梁富裕净空高度急剧减小,也容易因超高而引发船撞桥事故。
实际上,除长江外,船舶超高发生碰桥的安全隐患,在我国其他通航水域普遍存在,如广深高速川槎大桥从从2013年以来,多次发生船舶碰撞桥梁T梁事故,造成重大损失。
为解决这些问题,提出一种桥梁通航净高全天候自动实时检测与综合报告的装置,从源头上避免船撞桥事故的发生是非常必要的。船舶因超高碰撞桥梁事故的发生,大都因船舶对自身及桥梁实际通航净高判断失误造成。由于现有的净高测量方法存在局限和不足,在河流水位变幅较大、桥梁净高不足加之船长不熟悉航道条件等众多不利条件下,让船舶提前感知桥梁净空高度信息,与船舶高度进行简单比对,顺利通过桥区,避免船桥碰撞事故的发生意义重大。因此需要对净高的检测方法进行研究,目的是为船舶全天候提供实时、精确和便捷的净高信息。
3 一种桥梁净空实时自动检测与综合报告系统
基于上述考虑,笔者通过研究,提出了一种桥梁净空高度的自动实时检测与综合报告系统,该系统由安装在桥梁上的导向杆、距离传感器、测报器和传感单元四大部分组成,能迅速自动实时检测和进行净高信息综合报告。该系统已于2015年获得国家实用新型专利(专利号ZL 2015 2 0143445.5)。
3.1 系统结构及原理
该系统包括标尺(1),高频率激光测距传感器(MSE-LDS30B)(2),反射板(4),以及搭载Cotex3内核的STM32芯片做主控芯片的测报装置(3)(如图1所示)。
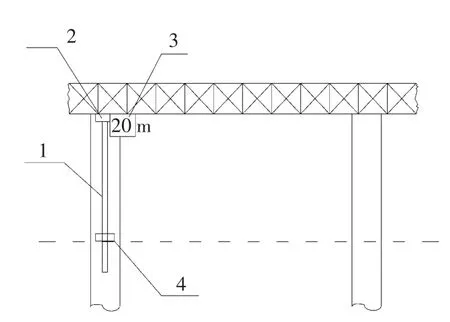
图1 桥梁净空高度自动测报系统结构图(1-导向杆,2-距离传感器,3-测报器、4-传感单元)Fig.1 Sketch of automatic detection system for the navigable clearance height of bridge
系统其中高频率激光测距传感器[3],由红外激光发射管、接收管、光电池和转换电路组成,在激光发射部分采用测距专用激光器产生高性能的脉冲激光,激光接收部分选用雪崩光电二极管(APD)进行光电转换。
在系统传感器的选择上,经过多次试验对其性能进行比选,开始采用的超声波传感器,由于其在江面工作时,受风、雨、障碍物干扰较大,精确度不能保证,最终选用高频率激光测距传感器(MSE-LDS30B),因为其相比于其他传感器,如超声波测距传感器等,具有性能稳定、响应速度快、抗冲击、耐振动、干扰小、寿命长、检测距离远、可以看见激光光束、调试方便、精准度高,穿透雨、雾、雪、风沙能力强等优点,可极大的降低测量的误差率,非常适合在恶劣环境如:(江面、海面)工作。

图2 系统原理图Fig.2 System principle

图3 系统运行工作图Fig.3 Principle for operation work of the system
测报装置3的主控芯片为搭载Cotex3内核的STM32芯片,具有处理速度快,实时性好,测量误差小,GPIO端口丰富等优势,非常适合用于此测控系统。
其工作原理为:固定在桥墩上的导向杆1上端安装有高频率激光测距传感器2,反射面4安装在导向杆下端并可随水面高度变化而上下自由移动,这样不仅保证反射面始终位于水面位置,同时也保证了每次测得距离的准确性和可靠性。导向杆下端的反射面4与置于桥顶的高频率激光测距传感器2形成反馈,主控芯片通过GPIO端口发送命令给高频率激光测距传感器4,高频率激光测距传感器2开始发送红外激光信号,反射面4接收到红外激光信号后就会产生漫反射。经反射面反射后激光向各方向散射,部分散射光返回到传感器接收器,被光学系统接收后成像到能检测极其微弱的光信号,具有放大功能的光学传感器——雪崩光电二极管上,记录并处理从光脉冲发出到返回被接收所经历的时间,根据发送的时间T和激光传输的速度V0做出运算H=V0T/2即可测定目标距离。此时就会通过串口RS232返回相关数据信息给主控芯片或者PC机。在这个过程中所测得的H为实时桥梁净空高度,并将STM32处理后的数据通过数据GPIO端口发送到LED显示屏3显示出来,当净高不达标时可根据管理部门的要求显示警告信息或禁航信息,同时通过VHF公共通信频率(16f)小功率方式向附近过往船舶进行语音传播,并可通过手机短消息方式发送至有关管理部门(可设置发送条件),如果水位上涨超过最高通航水位,可以采取相应的通航管制措施。
3.2 优点及适用性
该系统主要有以下优点:
(1)避免船舶超高碰撞大桥事故的发生。船舶超高碰撞桥梁事故的发生主要是由于船舶对桥梁实际通航净空判断失误造成,而本系统可根据实际水位变化情况,显示实时获取的桥梁通航净空信息,特别是在水位变化较大,水位突然涨落时以及特殊水文年,为船舶安全航行,提供了准确及时的判断依据和信息,可有效避免船撞桥事故的发生,同时提高了船舶航行通过桥区的安全性,确保生命及财产安全。
(2)综合报告桥梁实时净高信息,便于船舶及管理部门及时采取措施。以往判断船舶是否能够安全通过桥梁,主要是根据航行水尺及桥梁高度信息粗略换算相减,并与自身船舶实际高度比较而来,数据不精确,不直观,如果夜间或视线不良或没有水尺信息,会严重影响船舶驾驶人员对桥梁净空高度的判断。而该系统直接醒目地显示和VHF无线电语音播报两种方式,提高了过往船舶提前获取桥梁实际净空高度信息的可靠性,从而及早采取相应的安全措施,避免事故的发生;此外,当桥梁净高不足时还可通过短消息的方式通知管理部门采取措施,显示屏可以根据需要显示警示或禁航信息。
(3)成本低,安装方便、实用性强。该系统可以避免桥梁投入大量的资金建设被动防碰设施,效费比高,成本低。该系统在桥梁及船舶航行安全方面由被动防撞转化为主动防撞,从而减少事故的发生,创新性强,并且可作为桥梁安全评估系统的一部分,为其增加准确的判断依据。该系统采用的技术较为成熟,且结构简单,原件采购方便,系统安装、调试方便,并利用船舶已有的公共频道资源,不会增加船舶的附加费用,实用性较强。
该测报系统可有效施行净空高度的预警,使船舶及时感知桥梁净空高度,做出合理判断,从而降低船撞桥事故的风险,可在各河流的通航上推广,具有很好的适用性。
4 系统应用实例
该系统在奉节长江大桥、白沙沱长江大桥通航孔主桥墩上进行安装测试(如图4所示)。奉节长江大桥及重庆白沙沱长江大桥分别于2006年6月及1958年6月年建成通车,通航桥孔跨径分别为420 m及80 m,设计最高通航水位分别为:173.48 m及190.6 m,通航净高为18 m,该两座桥梁在最高通航水位时桥梁实际净高富裕很小,且其中奉节长江大桥为通航受限桥梁。在安装测试过程中,为解决高频率激光测距传感器MSE-LDS30B反射面2能够平稳浮在水面上这一问题[4],我们采用浮球,并将其重心固定于球体下端的,将反射面安装在浮球顶部,通过反复调试,能够确保在不同风浪条件下,测距传感器MSE-LDS30B反射面4都能够平稳浮在水面上,准确的接收及反射接收到的激光信号。此外,针对反射面在水面移动位置的不规律性,导致射激光信号不稳定,甚至有时候反射失败这一问题,我们将标尺表面加上导轨,并将反射面卡在导轨上,固定反射面只能纵向移动,防止其左右偏移带来的测试不准确,从而解决了反射面的偏移问题。调试稳定后,根据试验,效果如下:
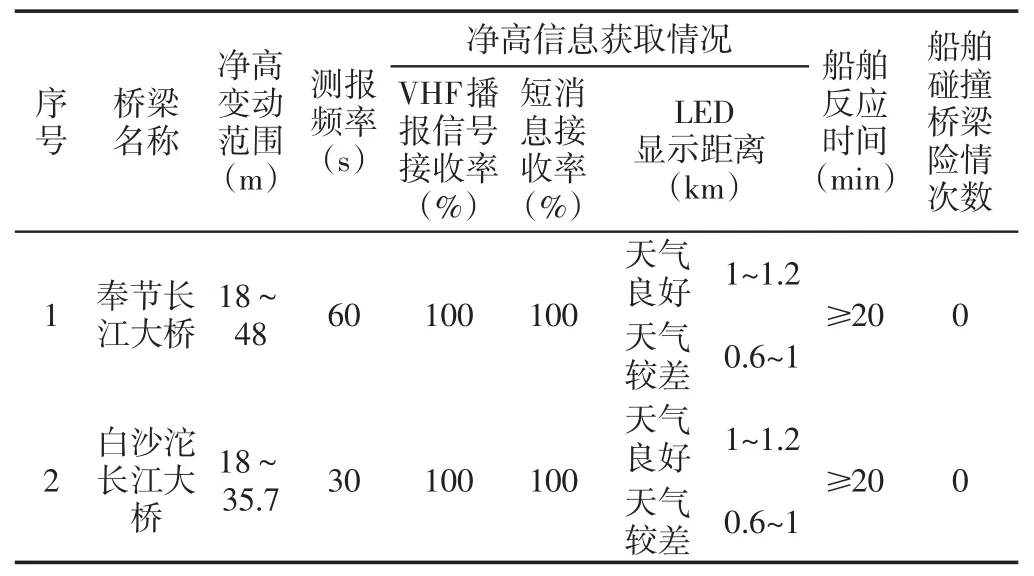
表1 试验结果表Tab.1 Test results
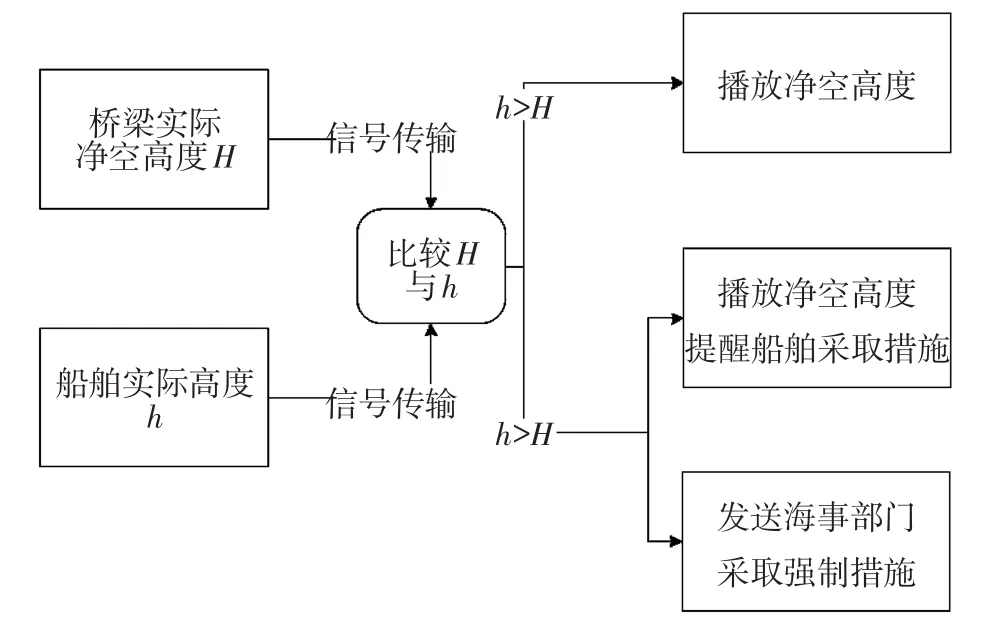
图4 桥区船舶安全预警信息系统工作示意图Fig.4 Sketch of forecasting system operation for ship security at bridge area
(1)由上表可以看出在安装使用该装置之后,船舶在通过此两座大桥时,能有效获取准确的桥梁实际净高的信息,有足够的时间与所驾驶船舶实际高度进行对比判断,并有充足时间采取措施,提高了驾驶人员超高判断的准确性,杜绝了因船舶超高造成的船舶海事,也有利于保证通航安全。因此该装置的设计目的及预期目标得到了较好的实现,可以在其他桥梁上推广应用。
(2)该装置性能稳定,获取数据及报告信息较为准确、及时、便捷,因此该装置的设计目的及预期目标能够很好的实现,可以在其他桥梁上普遍推广应用。
5 结论及展望
该测报系统简单易实施,安全可靠,实用性强且效费比极高,能够及时有效的解决桥梁实际净空高度的检测、发布及危险报警禁航问题。它能够很好的从源头上解决船舶超高造成的事故,大大提高船舶通航的安全性。今后可广泛推广应用于通航净空高度富余小的内河及跨海桥梁上,还可扩展应用于过江管线及其它跨河建筑物上。
此外,本系统还可以进一步扩展及完善,加入船舶实际高度信息获取与监测系统模块,与本系统获取的准确的桥梁净空信息相比较,从而准确判断船舶是否能够安全通过桥区,并与海事管理系统实现联动管理,建立“桥梁区域船舶安全预警信息系统”(如图4所示),从根本上减少船舶超高撞击桥梁事故的发生。
[1]陈国虞,王礼立.桥梁防撞理论及防撞装置设计[M].北京:人民交通出版社,2014.
[2]黄喆.桥区船舶安全通航与高度测量系统研究[D].大连:大连海事大学,2015.
[3]徐恒梅,付永庆.相位法激光测距系统[J].应用科技,2010,37(6):20-22. XU H M,FU Y Q.Research of the phase laser ranging system[J].Applied Science and Technology,2010,37(6):20-22.
[4]常凤筠,崔旭东.激光测距传感器在液位测量系统中的应用[J].应用激光,2013(1):44-47. CHANG F J,CUI X D.Laser liquid level measuring instrument design[J].Applied Laser,2013(1):44-47.
Real-time detection and integrated report system for navigable clearance height of bridge
GUO Yi-hao
(Changjiang Chongqing Harbour and Waterway Engineering Investigation and Design Institute,Chongqing401147,China)
According to the current standards of inland navigation,the navigable clearance height of bridge is mainly determined by the channel level and the corresponding designed highest navigable water level.The risk of ship-bridge collision is easily caused due to the frequent changes of the water level in flood season and the height disunity of light ship.According to current situation of navigable clearance height and ship in China,a real-time detection and integrated report system for navigable clearance height of bridge was proposed based on the analysis of the rapid detection and the real-time reception of ship.Also,a corresponding national patent was authorized.The clearance height of bridge is easily forecasted and the risk of ship-bridge collision is significantly reduced by the system.Moreover,the system can be widely applied in various rivers.
bridge;clearance height;ship-bridge collision;risk;automatic detection
U 656;O 242.1
A
1005-8443(2017)01-0054-05
2016-05-30;
2016-11-16
郭义浩(1963-),男,湖北天门人,高级工程师,主要从事港口航道、船闸与桥梁通航技术的研究。
Biography:GUO Yi-hao(1963-),male,senior engineer.
猜你喜欢
水利与建筑工程学报(2022年5期)2022-10-28
交通科技与管理(2022年8期)2022-05-07
辽河(2022年1期)2022-02-14
辽河(2022年1期)2022-02-14
宝藏(2021年3期)2021-04-20
建材与装饰(2020年13期)2020-05-19
建筑科技(2020年4期)2020-03-08
今日农业(2019年10期)2019-06-26
现代园艺(2018年2期)2018-03-15
浙江柑橘(2016年2期)2016-03-11