工程型院校机器人课程的教学改革与实践
2017-04-12 01:16刘凌云罗敏李慧玲吴岳敏
课程教育研究·新教师教学 2016年17期
刘凌云++罗敏+李慧玲+吴岳敏
摘 要:本文结合我校自动化专业人才培养方向,以“工程型人才培养”为主导思想,对机器人教学内容及方法所做改革和探索进行了描述,课程改革中强调教学的“工程”与“实践”性,将学生创新能力的培养贯穿于机器人教学的全过程,实践表明,改革后的机器人教学内容和教学方法能有效提高教学质量和学生的实践能力。
关键词:机器人教学;工程实践;创新能力
G642.0;TP242-4
作为具有鲜明汽车行业背景的地方院校,我校的人才培养定位是为汽车工业生产第一线培养高级工程应用型人才。针对这一总的指导思想,我校自动化专业明确提出以汽车生产自动化作为专业方向,把培养和造就综合素质高、工程创新意识和实践能力强的工程应用型人才作为本专业人才培养目标,在人才培养计划、课程设置等方面大胆的进行改革与探索,突出数控系统与工业控制方面的工程训练内容及培养方向,形成机械基础—PLC技术—数控技术及编程—典型数控系统及应用—工业机器人工程应用为主线的汽车生产自动化技术系列课程。
尤其是工业机器人技术广泛应用于各个工业领域,成为制造业生产自动化中主要的机电一体化设备,与PLC、数控技术并列成为当今工业自动化生产的三大支柱[1]。为了适应这种社会需求的变革,在高等院校中开设相关机器人技术及应用的课程和实验,有利于培養学生的科学素质和工程意识[2]。
结合我校自动化专业在机器人课程方面所做的改革与实践,本文就课程内容的更新、实践教学平台建设及实验项目的提炼等进行探讨,以期进一步完善和优化机器人教学课程内容。
一、机器人课程教学情况
国内许多高等院校都已开展了机器人教学工作,开设的专业也较广,且课程教学以理论为主,实验学时数相对较少,大多数高校的实验课时数甚至为零[3]。
我校自动化专业于2006年开设《机器人技术导论》课程,尽管在教学内容上反映当前工业机器人技术的发展现状与趋势,在教学方法上从兴趣方面引导学生积极自主地学习,同时借助于多媒体技术,特别是讲解机器人数学建模时,结合动画和录像演示以增强教学的时效性;但教学环节上偏重于教师的讲授,学生独立思考欠缺、无实践教学环节、教学内容工程实践性不强。且本门课程涉及面广、知识复杂、公式繁多、内容抽象,理解困难就成为历届学生对该课程的共同印象。
二、课程建设与改进的思考
1.教学内容的更新
依据我校自动化专业本科生的培养目标,且在技术性层面上最大限度的体现理论和生产实践相结合,我校自动化专业将机器人课程名称更改为《工业机器人应用技术》,为配合该课程改革,本专业先后购置两套工业机器人教学实验平台:带激光焊缝跟踪的Motoman Up6弧焊工业机器人及FANAC智能工业机器人实训系统。
课程授课学时在原有的30学时理论教学基础上增加了6学时实验教学;且在课程教学大纲上作了相应的更新,理论教学内容围绕实验室的Motoman Up6工业机器人系统进行增补和删减:①在机器人运动学章节的讲解中,以Motoman Up6工业机器人结构为对象,将重点放在前向运动学原理与计算中;②在操作臂的控制这一章节中将授课重点放在机器人控制器硬件体系及软件架构上。③在传感器原理讲述中,应侧重于目前机器人系统中应用较多的一些传感器,如光电码盘、电位计和机器视觉,并增加机器视觉案例分析:激光焊缝跟踪系统/摄像机二维位姿检测在机器人弧焊或上下料中的应用;④在机器人轨迹规划和编程章节,增加了与Motoman工业机器人配套的离线编程软件Rotsy应用的讲解,便于后续试验项目的开展。
同时,在教学方式上增加了现场讲解环节。为了让学生们能够更好地理解和掌握机器人运动学的知识,我们把部分课堂环节改在机器人实验室进行,以真实的Motoman Up6工业机器人为例,讲解机器人的关节、连杆、坐标系、D-H建模、正运动学和逆运动学的知识。这种教学方式直接、直观、便于理解,让学生的学习做到了理论与实际有机结合。
2.机器人技术的实践教学
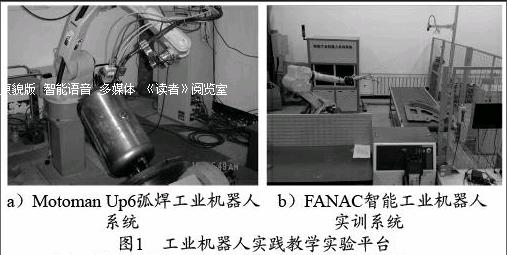
为了巩固工业机器人的相关理论知识和加深对理论认识,培养具有创新意识的高素质工程技术人员,我校自动化专业先后购置两套工业机器人实践教学实验平台(如图1所示):带激光焊缝跟踪的Motoman Up6弧焊工业机器人及FANAC智能工业机器人实训系统,并且对本课程相关的实践教学内容及方法进行了优化改进。
其中弧焊工业机器人平台由标准型工业机器人Motoman Up6、工件变位机、两套末端执行器(CO2保护焊系统、气动V型夹爪)及Meta视觉系统公司的激光定位系统等组成,另外购置了两套配套软件:机器人离线编程软件Rotsy和机器人通讯软件Motocom32,由此构成了一个完整的机器人工作站,可用于弧焊机器人焊接跟踪、作业对象位姿检测。目前,在该机器人平台上已开出的本科生实验有:①Motoman Up6机器人虚拟仿真及离线编程实验;②工具/工件坐标系的标定实验;③复杂构件三维空间模拟点焊实验;④复杂构件三维空间连续焊接(带焊缝跟踪功能)实验;⑤车身喷涂轨迹规划实验。
FANAC智能工业机器人实训系统以白车身冲压生产线的自动上下料为控制对象,由PLC控制冲床及自动输送线的动作,工业机器人根据智能相机检测反馈的白车身位姿偏差量对工具控制点进行实时纠正,以适应对输送线上处于任意位姿的工件进行抓取。该系统能从控制系统集成、工业机器人及机器视觉几个大方向开展创新实验设计,目前已开出的综合实验有:①工业机器人与PLC之间数据交互及应答通讯;②为满足各子系统间的协调动作,进行机器人运动程序及PLC控制程序设计;③基于机器视觉的零件位姿/尺寸测量及缺陷检测等实验;④基于机器视觉的机器人自适应抓取工件程序设计。
这些综合性实验项目的设置,充分体现了与工程实践相结合的的特点,大大丰富了实验教学的案例内容。
实践证明这种以工业机器人作载体,形成理论与实践相结合的教学模式,能充分激发学生的学习兴趣、积极性及创新思维,提高了学生的实践动手能力和工程創新意识,使学生们对于机器人课程有了一个系统的认识和理解。
同时,利用该“工业机器人教学试验平台”结合东风汽车公司各专业厂的工程实际项目,有效的指导本专业部分学生进行毕业设计,例如:“汽车前悬梁架工业机器人焊接的研究与实现”、“工业机器人激光焊缝跟踪子系统软硬件设计与实现”、“视觉机器人手眼系统标定算法研究”等毕业设计课题的开展,学生既可以在工业现场了解实际工业机器人系统的工作原理及运行状况,同时对现场的不足提出改进意见、制定方案并进行系统软硬件设计,进一步在实验室工业机器人平台上加以演示和验证,使学生在训练中学会如何将知识应用到生产实际中。
三、结束语
本文对我校自动化专业机器人课程理论、实践教学的改革进行了探讨,力图最大限度的将大学生工程实践能力的培养、训练和形成以及工程创新意识的培养贯穿于机器人教学的全过程,本教学项目的研究和实施,为培养“工程应用”型人才探索出了一条可行的道路。
参考文献:
[1] 郗安民,刘颖,陈工,马祥华等. 工业机器人教学实验工作站[J]. 实验技术与管理,2001:18(5): 17-20.
[2] 万佑红,蒋国平.机器人教育与大学生创新能力培养的探索[J].电气电子教学学报,2005:27(4): 6-9.
[3] 战强,闫彩霞,蔡尧. 机器人教学改革的探索与实践[J].现代教育技术,2010:20(3):144-146.
[4] 张国民,张剑平. 课程视角下的机器人竞赛辅导研究[J].中国电化教育,2008,262(11):92-94.
[5 ] 胡蓉,蒋海燕. 构建“机器人”教学平台完善工程训练创新与实践教学体系[J]. 决策管理2008,1:73-74.
[6] 李鸣华. 机器人教育的教学设计[J].中国电化教育, 2007,247(8) :98-101.
作者简介:刘凌云,男,湖北荆州人,副教授,研究方向:机器视觉、机器人应用研究;E-mail:270228224@qq.com ;罗敏,男,教授,研究方向:数控技术等。
猜你喜欢
中学生学习报(2022年13期)2022-04-16
中学生学习报(2022年14期)2022-04-15
安徽农业科学(2022年6期)2022-04-11
价值工程(2016年30期)2016-11-24
科教导刊(2016年26期)2016-11-15
考试周刊(2016年84期)2016-11-11
农业与技术(2016年15期)2016-11-09
科技视界(2016年21期)2016-10-17
大学教育(2016年9期)2016-10-09
中学理科·综合版(2008年10期)2008-12-04