立体仓库实训教学设备的设计
2017-04-10 12:06:02朱建军
实验室研究与探索 2017年1期
朱 建 军
(吉林化工学院 信息与控制工程学院,吉林 132022)
立体仓库实训教学设备的设计
朱 建 军
(吉林化工学院 信息与控制工程学院,吉林 132022)

针对高校实践教学要求并结合自动化类专业的特点,开发设计了一种模拟生产实际的自动化立体仓库实训装置。详细地介绍了装置的总体结构、硬件设计、下位机程序设计和上位机监控组态设计。本装置采用西门子S7-300PLC作为控制系统,并用WinCC组态软件开发了监控系统,实现了自动化立体仓库实训装置的就地手动控制、远程手动控制和远程自动控制等操作模式。在实际学生实训中,该装置实现了自动化生产实践教学内容的形象化,拉近了课堂与生产实践的距离,为培养学生实践动手能力、分析解决问题的能力提供了一个很好的实践平台。
立体仓库; 实训装置; 实践教学
0 引 言
立体仓库是一种集贮存、管理于一体,在没有人工干预的情况下自动完成货物存取操作的控制系统,具有占地面积小、省时、省力、高效等特点。在高危险环境中工作时,可以通过人机界面远程控制货物的存取工作,保证工作人员的安全。人机界面还可以监控货物存取过程,并可以记录查询存取情况,方便工作人员进行数据统计[1-4]。
为满足实验教学、实训、毕业设计以及提高学生工程实践能力和创新能力的需要,为此设计开发了立体仓库实训教学设备。
1 立体仓库控制系统结构设计
自动化立体仓库主要由控制系统、立体货架、码垛机、监控系统和电气柜等设备构成[5-6],如图1所示。
(1) 控制系统。采用西门子S7-300系列CPU314C-2PN/DP作为控制核心,它属于紧凑型CPU,集成了24路DI、16路DO、5路AI和2路AO,其中4通道DO可以产生脉宽调制为2.5 kHz的脉冲输出,可以用来完成对步进电机的驱动和控制。
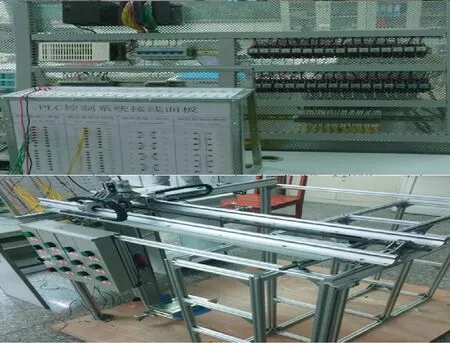
图1 自动化体力仓库实训设备
(2) 立体货架。用来存放货物的设备,是立体仓库的主体。设备设计材料选用20×20的铝型材,结构稳定,同时可方便用户灵活调整。本设计巷道数1个,9个货位,分为1栋3列3层。
(3) 码垛机。码垛机是自动化立体仓库中最重要的传动设备,是整个控制系统的核心组成部分。其工作过程要保证:运行安全可靠、货物存取精确、操作快捷方便。本系统设计码垛机由控制水平行走的X轴行走机构、控制升降的Z轴行走机构和控制载货平台伸缩的Y轴行走机构。其机械部分采用金属钢轨、光轴、丝杠等机械元件组成[7-8]。同时为了防止水平和垂直方向出现越限问题,在水平和垂直方向的两端安装了限位行程开关,保证系统运行可靠。
(4) 监控系统。监控系统通过触摸屏和WinCC组态软件实现现场设备状态的采集、显示和对设备的就地和远程控制。
(5) 电气柜。电气柜由开关电源、显示运行状态的指示灯、负责现场操作的操作按钮和接线端子排等组成。
2 立体仓库系统硬件设备及控制流程
2.1 控制系统硬件结构
自动化立体仓库控制系统硬件主要由PLC、触摸屏、计算机、驱动模块、直流电机和步进电机组成,其PLC外部接线图如图2所示。
2.2 码垛机驱动部件和检测元件
为实现码垛机准确定位,保证准确完成货物的入库和出库,选用了步进电机和直流电机作为驱动元件。
本设计X、Z轴方向的运动精确控制,采用了2线6相57步步进电机和109S-48-4.5 32细分步进电机驱动器,驱动电路原理如图3所示[9-10]。
在Y轴方向采用直流电机,选用L298N驱动模块来控制电机。需要注意的是PLC的输出信号是24 V,而L298N驱动模块的信号是5 V,需要通过中间继电器实现电压转换,L298N模块驱动电路原理见图4。
为了保证系统可靠运行,设计中采用了接近开关作为位置限位和货物位置的检测元件。选择接近开关的型号不同,它与PLC的接线方式也不同,本设计中采用的是NPN型金属接近开关,接线方式为三线制,接线原理图如图5所示。

图2 PLC外部接线图

图3 步进电机驱动原理图

图4 直流电机驱动电路原理图
2.3 立体仓库自动控制系统控制流程
控制系统控制模式包括就地模式、远程自动控制模式和远程手动模式[11]。就地控制模式是在现场通过电气柜上的按钮开关实现将仓库货物送到指定位置或者将某一仓库的货物取出。远程自动控制模式是由PLC判定位置,由PLC直接控制,系统运行过程中没有操作人员的干预。远程手动模式是操作员通过触摸屏或WinCC组态的人机接口进行存取货物的操作,其存取操作流程如图6所示。
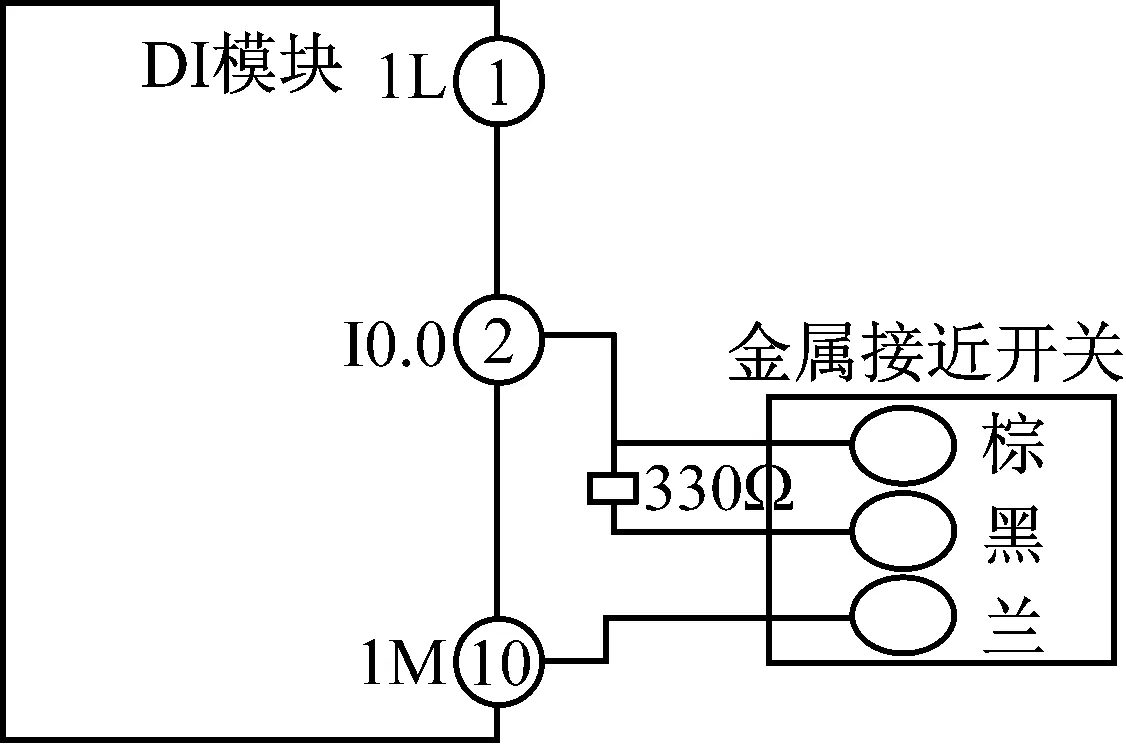
图5 接近开关接线原理图


图6 码垛机工作流程图
3 立体仓库软件设计
立体车库自动控制系统软件设计包括上位机监控软件和下位机PLC程序两部分,下位机PLC程序通过STEP7 V5.5实现,上位机人机接口界面通过WinCC组态软件和威纶通触摸屏实现。
3.1 下位机PLC程序设计
下位机程序开发设计采用模块化的编程方式,可以按照自动化立体仓库的控制要求将控制任务分为初始化模块、主程序块和码垛机工作程序块。
(1) 初始化模块。初始化程序写在OB100组织块内,负责系统上电后,把预先设定的值进行初始化。初始化程序在系统上电后只执行一次。
(2) 主程序块。主程序块写到OB1组织块内,负责整个系统的各功能块的调用。
(3) 码垛机工作程序块。码垛机工作程序块根据用户控制指令,确定存取货物的位置,在PLC程序中计算出水平运动的步数和垂直升降的步数,通过输出模块,控制驱动器控制步进电机,从而使堆垛机将货物准确地送到需存取库位位置;通过Y轴的光电开关、限位行程开关反馈的数据,控制直流电机完成货物的存取操作[12]。
3.2 上位机监控组态
人机界面开发采用WinCC实现,根据自动化立体仓库的控制要求,设计了操作员的操作界面、报警显示、设备参数管理等画面[13-15]。监控主画面见图7。

图7 立体仓库监控画面
通过监控系统操作画面使工作人员可以实时监控立体仓库的运行状态,如方向、位置、仓位情况等。当立体仓库在运行中出现故障如非正常运行、硬件故障等,可以及时提醒管理人员对故障进行判断和处理,并将故障信息存档以便日后分析处理。同时,通过上位机可以对仓库系统的货物存取情况进行记录,方便管理人员对出入库的货物情况进行统计,形成报表。
4 结 语
立体仓库自动控制实训系统的设计,涉及了可编程控制技术、电机驱动技术、传感器、系统维护和故障检测技术和组态监控技术等,实现了实践教学内容形象化,拉近了课堂与实践的距离,为培养学生实践动手能力、分析解决问题的能力提供了一个很好的实践平台。同时在项目的实现过程中进一步提高了教师的实践应用能力。实践证明,系统工作稳定可靠,达到了实践教学的目的和要求,取得了良好的教学效果。
[1] 张洪欣,姜 宁.机电一体化教学实训系统的设计与研制[J].机械制造与研究,2006, 35(6): 67-68.
[2] 赵洪涛,刘家骏.基于PLC控制的自动化立体仓库仿真研究[J].制造业自动化,2012, 34(9): 126-127.
[3] 周炯亮,郑安平.基于PLC控制的自动化立体仓库的设计[J].仪表技术,2011,39(6):18-20.
[4] 胡广鹏,郭佑民. 基于PLC的立体仓库堆垛机控制系统设计[J].兰州交通大学学报,2011,30(6):85-87.
[5] 宫 鹏,刘 丹. 基于WinCC和S7-200 PLC的自动化立体仓库监控系统[J].实验室研究与探索, 2008, 27(8):219-222.
[6] 程玉凯.基于PLC的自动化立体仓库控制系统设计[J].可编程控制器与工厂自动化,2011, 7(6):208-210.
[7] 易芸芸,杨公源.基于PLC的立体仓库控制系统设计[J]. 可编程控制器与工厂自动化,2010(6):93-94.
[8] 关 明,周希伦,马立静,等.基于PLC的机械手控制系统设计[J].制造业自动化,2012,34(7): 120-121,142.
[9] 薛广库.S7-300-PLC在巷道堆垛机中的应用[J]. 制造业自动化,2014,36(9):29-33.
[10] 王江涛,刘海琴.基于PLC的自动化立体仓库实验系统的研制[J].机械工程与自动化,2011, 13(3):129-130.
[11] 钱 昕.基于PLC的自动化立体仓库设计与组态监控[D].苏州:苏州大学,2009.
[12] 李庭贵.基于PLC和步进电机的立体仓库存储系统精确定位控制设计[J].制造业自动化, 2011, 33(10):149-153.
[13] 罗志国,姜茂发,邹宗树,等.RH实训教学系统的设计与研制[J]. 实验室研究与探索,2014, 33(8):229-231.
[14] 刘小春.基于组态控制技术的PLC实验开发[J].机械制造与自动化,2006,35(3):114-116.
[15] 俞海珍,史旭华,蓝林花.基于组态技术的PLC实验教学平台设计与实现[J].宁波大学学报, 2010,23(1):42-45.
·名人名言·
想像力比知识更重要,因为知识是有限的,而想像力概括着世界的一切,推动着进步,并且是知识进化的源泉。
——爱因斯坦
Design of Multi-layered Warehouse Training Device
ZHUJian-jun
(College of Information & Control Engineering, Jilin Institute of Chemical Technology, Jilin 132022, China)
In order to meet the needs of practical training in colleges and combine the characteristics of the automation, we designed the automated multi-layered warehouse training devices which simulated industrial production practical. Device is described in detail under the general structure, hardware, machine programming and PC monitoring configuration design. This device adopts Siemens S7-300 PLC as the control system, and uses the WinCC configuration software to develop the monitoring system. The device realizes the manual control, remote manual control and remote automatic control and so on. In practical training, the device implements the automation production of teaching content visualization, narrows the distance between the classrooms and production practice. It also provides a good practice platform for cultivating students’ ability to practice and analyze and solve problems.
multi-layered warehouse; training devices; practical teaching
2016-05-11
朱建军(1973-),男,吉林公主岭人,硕士,副教授,研究方向:工业过程控制及计算机辅助设计。
Tel.:13596209120; E-mail:zjj099@163.com
TP 273
A
1006-7167(2017)01-0277-03
猜你喜欢
现代信息科技(2021年21期)2021-05-07 02:54:12
装备制造技术(2020年3期)2020-12-25 05:22:06
河北农机(2020年10期)2020-12-14 03:13:42
重型机械(2020年3期)2020-08-24 08:31:48
电子制作(2019年20期)2019-12-04 03:51:36
酒·饮料技术装备(2018年1期)2018-04-28 09:09:07
凿岩机械气动工具(2017年2期)2017-07-19 10:21:13
制造业自动化(2017年2期)2017-03-20 14:26:07
工业设计(2016年11期)2016-04-16 02:49:22
中国铸造装备与技术(2015年5期)2015-12-10 10:23:41