徕卡断面监测软件在地铁隧道工程中的应用
2017-04-10 11:54:15薛慧艳
测绘通报 2017年3期
王 智,薛慧艳
(青岛市勘察测绘研究院,山东 青岛 266032)
徕卡测量新技术应用专栏
徕卡断面监测软件在地铁隧道工程中的应用
王 智,薛慧艳
(青岛市勘察测绘研究院,山东 青岛 266032)
地铁隧道开挖是隧道施工的重要工序,超挖过多,不仅会因出渣量和衬砌量增多而提高工程造价,而且局部超挖会产生应力集中问题,影响围岩稳定性;而欠挖则直接影响衬砌厚度,对隧道质量及后期运营产生安全隐患。因此超欠挖控制是地铁隧道施工质量评定的重要内容之一,进行超欠挖控制的方法是使用测量仪器观测隧道断面若干个点,形成实际的开挖轮廓线,并在同一坐标系中与设计轮廓线进行比较,从而获取断面的超欠挖量和部位,及时指导下一步施工。
徕卡断面监测机载程序及后处理软件的原理是对高精度的徕卡全自动全站仪进行二次开发,装载断面监测机载程序,在地铁隧道施工现场快速采集断面空间三维数据,经后处理软件与设计数据的对比分析,可有效判断出断面超欠挖情况,从而指导现场施工放样。该方法速度快、精度高,正被越来越多地应用于隧道工程中。
1 作业流程
作业流程如图1所示。
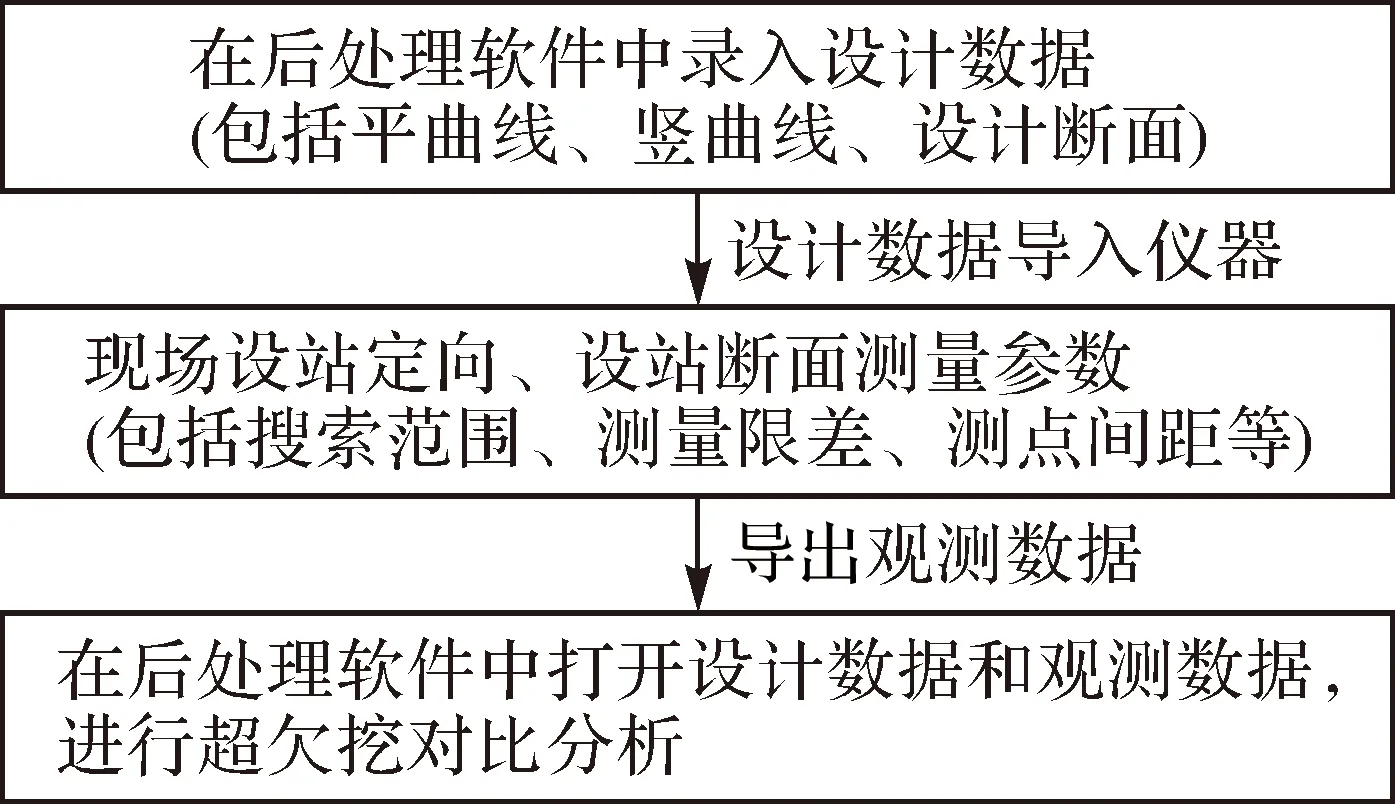
图1 作业流程
(1) 录入设计数据:在后处理软件中新建工程,填写工程属性,输入设计曲线要素,包括平曲线要素、竖曲线要素和设计断面类型及起始里程,保存工程后把文件保存在CF卡中并装入全站仪。
(2) 外业现场测量:在隧道内合适位置设站定向,运行断面测量软件,进行相关配置,如测量起始角度、断面类型、步进长度及方式、搜索范围、测量限差等,然后输入待测断面里程进行测量,如图2所示。
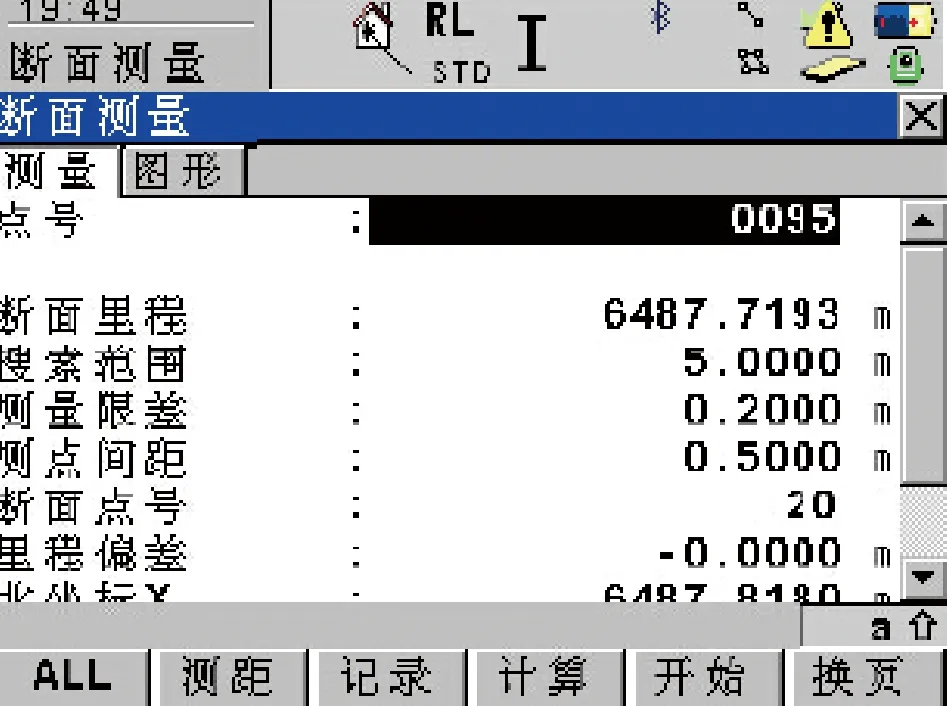
图2 现场测量仪器机载程序界面
(3) 内业数据处理:在后处理软件中打开设计文件,并导入外业实测数据,进行超欠挖计算,并输出相关图形报表。
2 超距改正
在曲线段进行超距改正是使用徕卡断面监测系统时需要特别注意的一个数据处理细节。设计线路是直线时,设计轨道中心线和隧道结构中心线在平面投影是重合的,而在曲线段是不重合的。由于超距e的存在,使得设计曲线与施工曲线不一致。设计曲线指的是隧道内铺设轨道中心的轨迹,而施工曲线是隧道中心的曲线即开挖掘进的轨迹。开挖曲线中心与设计曲线中心不重合,如图3(a)所示,O为隧道断面中心点,即施工线路;O′为轨道中心点,即设计路线;(b)中实线为设计曲线,虚线为施工曲线,具体表现为:当线路往前进方向进行右转时,设计轨道中心线在隧道结构中心线的左侧,当线路往前进方向进行左转时,设计轨道中心线在隧道结构中心线的右侧。
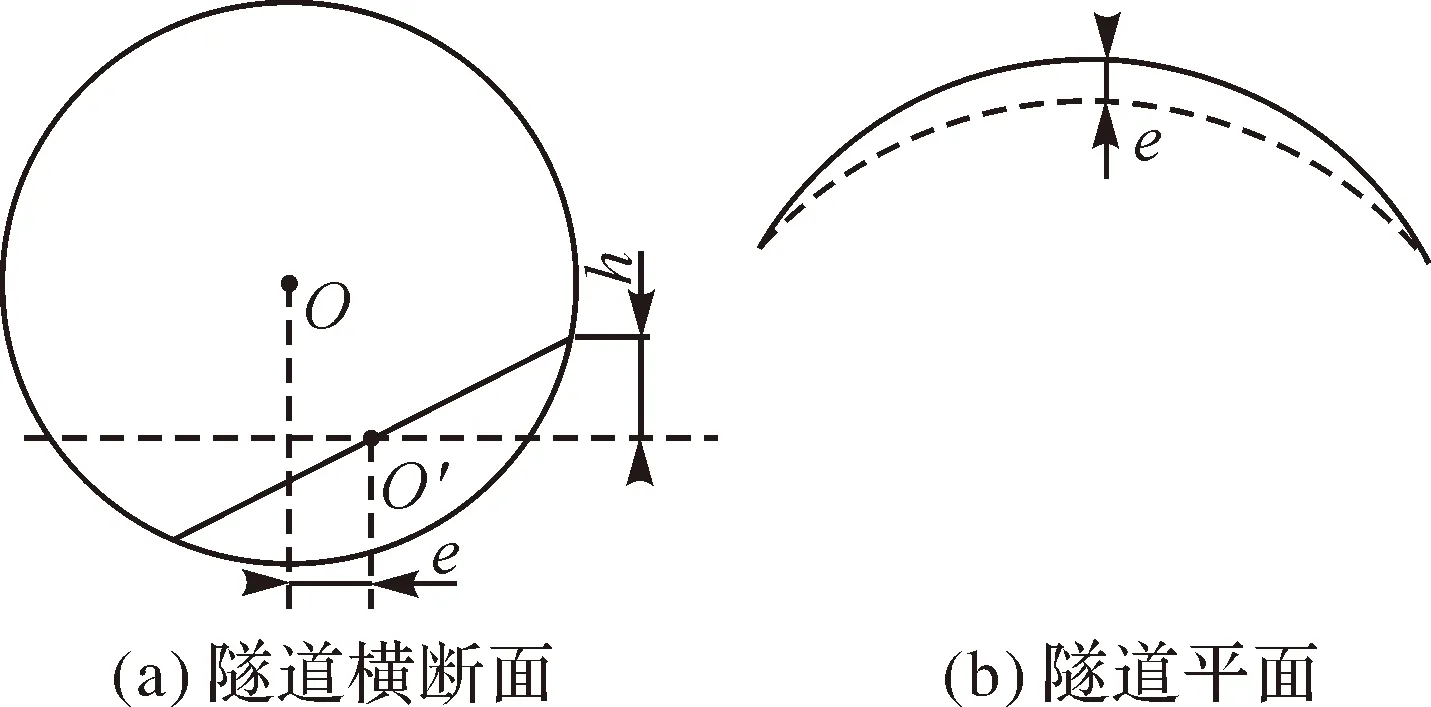
图3 超距示意图
在直线段,不存在超距,在圆曲线段,超距改正为恒定最大值e,在缓和曲线段直缓点至缓圆点变化中,超距由零线性增加到恒定最大值。假设某设计线路单侧缓和曲线长度为L,缓和曲线上某点里程据直缓点距离为s,则该里程处超距改正值d为
在徕卡断面监测系统后处理软件超距改正对话框中,断面坐标系原点相对于设计线路中线高程左偏偏移量设置为“-”,否则偏移量设置为“+”。
3 精度分析
根据在青岛地铁隧道工程中的应用经验,使用徕卡断面监测系统进行隧道断面超欠挖的精度主要与以下因素有关:全站仪设站定位方式及起算点精度、分布;软件测量限差、测点间距、搜索范围等设置。
3.1 设站定位方式及起算点精度、分布等对测量精度的影响
由于地铁隧道作业具有半径小、空间狭长等特点,利用全站仪在现场进行设站定向时主要采用后方交会方法,而隧道内控制点间距往往在60~150 m之间,因此后方交会夹角难以满足传统的30°~150°的要求,而设站的精度直接决定了后续断面测量的精度,在现场实测时可采取以下措施提高精度:
(1) 提高起算点精度。若隧道未贯通,测量初支断面,则地下导线点应起算于经联系测量传递到井下的固定点,并应有多余检核方向;若隧道已贯通,则应采用经两井定向或两站一区间联测后的地下导线点坐标。
(2) 为减小后视棱镜量高的误差,地下导线点应根据现场情况尽量采用强制对中装置,或在后视导线点上采用固定高度的对中杆。
(3) 仪器架设位置避免与前后视棱镜在一条直线上,有条件时尽量采用两个以上控制点进行后视定向。
3.2 测量限差、测点间距、搜索范围等设置对测量精度的影响
徕卡断面监测系统机载程序中最主要的数学模型是里程的计算,如仪器设站定向后软件就需根据设站点的三维坐标计算出当前架站点的里程,软件中搜索范围和测量限差的设置都需要仪器进行里程的相关计算并自动定位。本文以架站点里程定位为例说明该系统的里程相关算法,架站点里程可根据粗略里程判断和精确里程计算两步来进行。
架站点粗略里程判断的目的是寻找离架站点最近的点,其判别方法可采用距离法,抽象为以下模型:寻找一个点,该点与已知点之间的平面距离不大于其他点到已知点间的平面距离。具体方法是直接求出所有离散点与已知点的距离,然后取其最小者对应的点,该点即为所求点。
将该点及紧随其后的点间的设计曲线认为是一条直线段。将架站点投影到该线段,得到一投影点,认为该投影点的里程即代表切口的里程。该里程可由最近点里程加上或减去投影线段的长度而获取。假设里程是增加的,如果投影点位于最近点的前方,则加上这段长度;反之,则减去这段长度。假设里程是减少的,如果投影点位于最近点的前方,则减去这段长度;反之,则加上这段长度。


图4 粗略里程判断示意图
由于架站点在设计轴线上的投影点不可能正好与已经有坐标的放样点重合,因此需要在架站点粗略里程的基础上进一步推算架站点的精确里程。由于设计线路放样间距相对于曲率半径很小,此时S3S4之间的曲线段可看成为直线。P1相对于S3的位置的判断可以抽象为以下模型:判定一个点位于一条有向线段的前进区域还是后退区域。
如图5所示,已知有向线段AB的起点和终点平面坐标、独立点C的平面坐标,方位角αAB表示点A到点B的方位角,直线AD是AB的垂线。平面被直线AD分为两个区域,分别命名为I、II。判断方法如下:
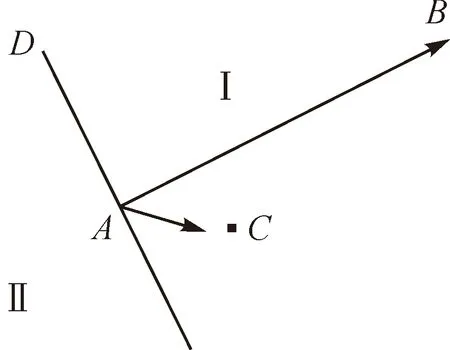
图5 前后关系判断
先求出αAB和αAC,然后计算两者的差Δα(Δα=αAC-αAB),再根据Δα的大小按照以下情况判断:
(1) Δα=π/2或Δα=-π/2,则C位于直线AB的垂线AD上。
(2) -π/2<Δα<π/2,则C位于有向线段AB前进区域,即Ⅰ区。
(3) -3π/2<Δα<-π/2或π/2<Δα<3π/2,则C位于有向线段AB后退区域,即Ⅱ区。
(4) -2π<Δα<-3π/2或3π/2<Δα<2π,则C位于有向线段AB前进区域,即Ⅰ区。
将以上讨论结果表示在数轴上,如图6所示。

图6
用函数cos(Δα)即可表示上面的关系。点C位于有向线段AB前进区域,即图6的Ⅰ区,对应cos(Δα)>0;点C位于有向线段AB后退区域,即图6的Ⅱ区,对应cos(Δα)<0。点C位于直线AB的垂线AD上,对应cos(Δα)=0。
最后,在第一步得到的里程的基础上再加上ACcos(Δα)即可得到架站点的精确里程。
根据以上分析,若搜索范围设置过大或过小,都会降低现场作业效率,该值一般设置为5m较为合适。测量限差设置过大,则断面采集的点位在正射影像上较为稀疏,难以实际反映某一里程断面超欠挖的真实情况;若设置过小,则会增加现场仪器搜索定位的时间。一般该值设置为0.5~1m较为合适,测点间距反映了某断面点位的密度情况,通常情况下设置为0.5m即可。
4 结 语
目前地铁隧道断面测量使用的方法主要是全站仪机载程序法,三维激光扫描仪由于后处理软件尚未成熟,该方法未在隧道断面测量中得到普及,而断面仪由于功能单一,在现场需要放样出线路中心线,也没有在地铁隧道中得到广泛应用。徕卡断面监测系统有效地将内业数据处理及外业自动测量进行有机结合,大大提高了地铁隧道断面测量的工作效率和精度。

猜你喜欢
小学生学习指导(高年级)(2021年5期)2021-05-18 07:34:42
电子制作(2019年14期)2019-08-20 05:43:42
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:42
小学生学习指导(低年级)(2019年4期)2019-04-22 03:28:40
国际呼吸杂志(2019年1期)2019-01-28 09:37:02
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:38
车迷(2017年12期)2018-01-18 02:16:12
中国宝玉石(2017年2期)2017-05-25 00:37:11
中国自行车(2017年1期)2017-04-16 02:53:52
中国宝玉石(2017年1期)2017-03-24 09:19:42