三维激光扫描技术在炼油厂改造中的应用
2017-04-10 11:54:17黄宝伟魏国荣
测绘通报 2017年3期
黄宝伟,魏国荣,张 彪
(中国石油工程建设公司华东环境岩土工程分公司,山东 青岛 266071)
天宝测绘解决方案专栏
三维激光扫描技术在炼油厂改造中的应用
黄宝伟,魏国荣,张 彪
(中国石油工程建设公司华东环境岩土工程分公司,山东 青岛 266071)
随着国内外油气田规模的不断扩大和产量的不断增加,部分炼油厂无论是在功能还是在规模上都已经不能满足石油炼制的需要,因此需要拆除、更换、新增大量的设备和工艺管线等。然而,由于炼油厂几经改造,现有的炼油厂图纸资料并不完整,不能满足炼油厂改造扩建的需要,给设计工作带来了很大困难。
为了给设计工作提供基础输入资料并且为后续的运行维护和管理提供很好的基础数据平台,需要对炼油厂进行现状测量以获取现场设备和管道的位置关系及分布情况。常规测量方法是采用全站仪或GPS进行单点三维坐标采集,但是炼厂内部设备和管道错综复杂的分布,极易造成测量盲点,加之厂区内部高压设备区域测量人员不能到达等不利因素的影响,使测量工作十分困难,工作效率低下。三维激光扫描技术是一种面测量,点的采集密度大、精度高,且是非接触测量,无需设置反射棱镜,因此在人员难以到达的危险区域使用优势更加明显,突破了传统的单点测量方式,以高密度、高分辨率获取扫描物体的三维点云数据,能够得到完整、全面的三维空间信息,成为一种良好的解决方案。
1 三维激光扫描作业流程
文中以使用Trimble TX8三维激光扫描仪对某炼油厂进行扫描测量为例,将获取的数据直接导入配套软件Trimble RealWorks中进行数据处理。通过Trimble TX8和Trimble RealWorks的配合,还能够导入主流CAD格式的数据。
1.1 点云数据获取
在进行点云数据获取之前,需要进行现场实地踏勘,根据厂区大小、设备和管道分布情况,设计一条合理的扫描路线并确定扫描站点的位置,以保证在扫描仪的有效范围内发挥其最大功效,避免重复扫描。同时需要在扫描区域布设目标标靶(标靶纸或标靶球),至少布设3个标靶,以便于后续将测站扫描坐标系转换到测量坐标系。
扫描站点和标靶布设完成后,将Trimble TX8三维激光扫描仪架设在扫描站点上并进行整平。安置好仪器后,开机设置扫描参数,设置完毕后即可进行扫描作业。扫描完成后,可在显示屏中实时查看点云数据,对点云数据获取不理想区域或局部复杂程度比较高的区域,可调整局部扫描级别重新进行局部扫描。
1.2 全景照片拍摄及制作
扫描作业完成后,取下三维激光扫描仪,保持三脚架和基座不动,架上相机云台及相机,然后从垂直于三维激光扫描仪屏幕轴线的方向开始,水平方向每隔60°拍摄一张照片,水平方向共拍摄6张照片,天空方向拍摄1张,地面方向拍摄1张。如果天空方向和地面方向能拍摄到的特征地物比较少,可以调节方向多拍几张照片,以便于后期进行全景照片拼接。
利用PTGui软件将拍摄的全景照片根据测站进行拼接,即可生成测站的全景照片,利用全景照片查看器软件可以浏览全景照片。
1.3 点云数据处理
点云数据处理采用配套软件Trimble RealWorks进行,主要包括点云数据去噪、点云数据拼接、坐标系转换和成果输出等。
1.3.1 点云数据去噪
扫描过程中外界环境因素对扫描目标会造成阻挡和遮掩,如炼油厂扫描过程中,移动的车辆、行人和树木的遮挡,以及实体本身的反射特性不均匀等,导致最终获取的点云数据可能包含不稳定点和噪声点,只有把这些噪声点去除后,才可以继续进行其他的操作,有助于后续建模。这个过程称为点云数据去噪或点云的过滤。
1.3.2 点云数据拼接
应用Trimble RealWorks软件能实现无标靶点云自动拼接,将相联系的测站区域进行拼接。如果拼接误差较大,可以进行手动拼接,软件将自动进行拼接精度检查,保证两站间的拼接精度在1 cm以内。依次进行相邻站间的拼接,得到完整的三维点云数据。图1所示为拼接后点云数据。
1.3.3 坐标系转换
由于拼接后点云数据坐标系为测站扫描坐标系,因此需要将拼接后点云数据坐标系转换为炼油厂设计和施工所用的测量坐标系。坐标系转换前,使用全站仪获得目标标靶在测量坐标系下的三维坐标。具体转换步骤如下:
(1) 使用Trimble RealWorks软件中“配准”菜单下的“目标分析工具”进行目标标靶的选取和重命名,至少需要选取3个目标标靶进行坐标系转换。为了方便检查和验证转换结果的准确性,本文选取4个目标标靶进行坐标系转换。
(2) 应用“配准”菜单下的“大地基准工具”进行坐标系转换。按照操作步骤,将4个目标标靶扫描坐标系坐标和测量坐标系坐标依次输入后,其下方将显示平均误差,平均误差毫米级为最佳,最后点击“应用”,点云数据坐标系转换完成。
1.3.4 成果输出
三维激光扫描成果不仅包括测量坐标系下完整的点云数据成果,还包括测量坐标系下三维实景浏览网页发布成果和点云数据建模成果等。
利用Trimble RealWorks软件自带的RealColor功能模块,将点云数据和全景照片进行匹配。全部匹配完成之后,利用Scan Explorer功能进行三维实景浏览制作。制作完成后,利用IE浏览器即可根据测站进行三维实景的浏览,并可以进行任意两点距离、水平距离、垂直距离量测,也可以进行切片分析等(如图2所示)。
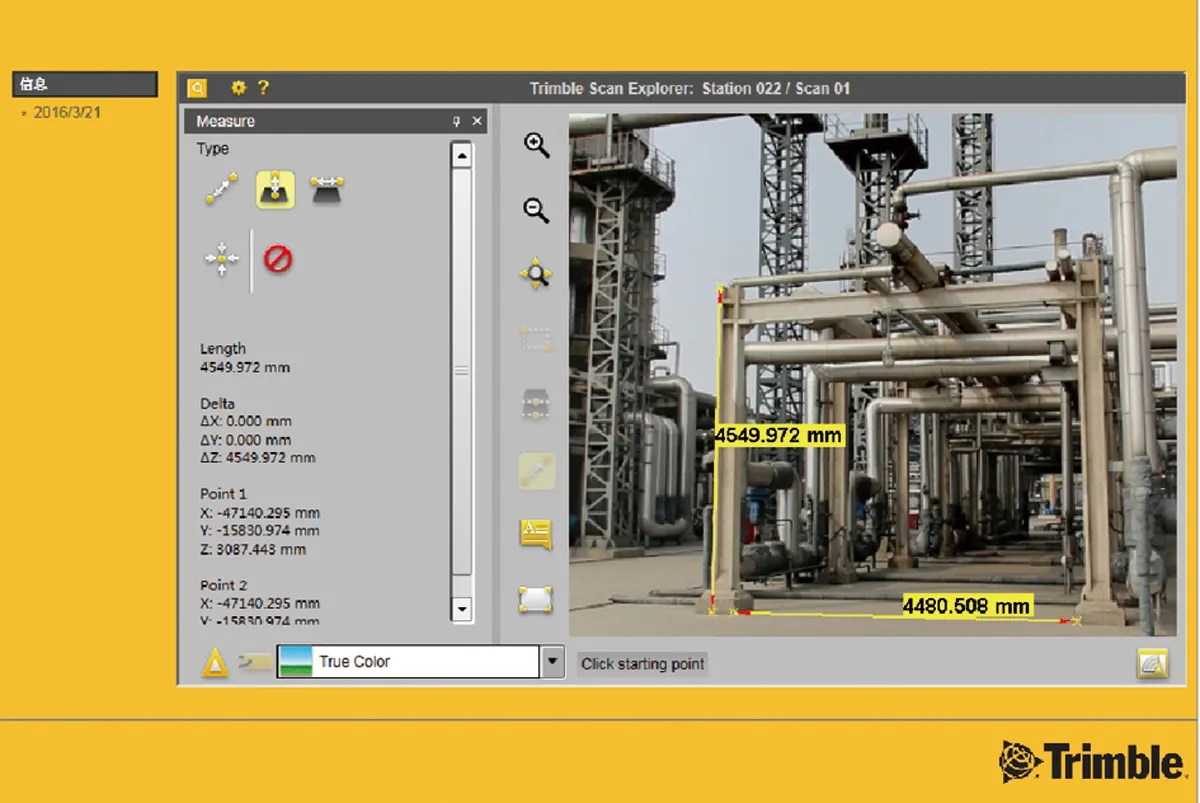
图2 三维实景浏览(Scan Explorer)
为了真实地还原炼油厂扫描目标的本来面目,需要将扫描数据用准确的三维模型表述出来,这就需要对点云数据进行三维建模和纹理贴图。将点云数据转换格式后导入到3ds Max软件中进行三维建模和纹理贴图。图3为炼油厂三维建模后局部现状模型。
2 点云数据的误差来源及分析
从误差理论角度来说,测量误差可分为系统误差和偶然误差。三维激光扫描过程中,测量误差来源主要有仪器误差、与目标物体反射面有关的误差及外界环境条件。

图3 炼油厂三维建模后局部现状模型
(1) 仪器误差:来自于仪器本身的性能缺陷,包括激光测距误差和扫描角度测量误差。
(2) 与目标物体反射面有关的误差:主要是目标物体表面粗糙程度的影响。
(3) 外界环境条件:主要包括外界环境的温度、湿度和气压等因素。
点云数据处理过程中的误差主要有:点云数据拼接误差、坐标系转换误差、三维建模误差。
(1) 点云数据拼接误差:在点云数据拼接过程中,由于多站点的扫描,各站获取的点云数据存在一定的偏差,而将其拼接在一起,就会造成点云数据拼接的误差。Trimble RealWorks软件点云自动拼接功能会自动计算拼接时所产生的误差。
(2) 坐标系转换误差:对于三维激光扫描系统转换到测量坐标系统,需要进行旋转参数、平移参数和比例因子的计算,导致存在坐标系转换误差。
(3) 三维建模误差:点云数据进行三维建模过程中,也将会产生建模误差。
对于上述误差,在生产实际中应根据测量的目的进行约束和控制,以满足测量精度要求。
3 结 语
三维激光扫描技术已经成为测绘领域一个新的研究热点,但是三维激光扫描仪在油气田场站、炼油厂等的应用还很少,它使我们能够得到完全真实的三维现状模型。依据该模型,可以以一种全新的模式进行场站、炼油厂的改造设计,为设计工作提供基础数据资料,也为后续运营、维护和管理提供很好的数据基础平台。随着三维激光扫描技术的不断发展,将同步采集的高精度点云及高分辨率影像数据与地理信息技术相结合,这在国内外油气田开发和运营管理中具有广泛的用途。

猜你喜欢
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
石油炼制与化工(2018年6期)2018-03-27 03:18:40
测绘工程(2018年3期)2018-03-20 03:05:12
电子测试(2017年15期)2017-12-18 07:19:00
中等数学(2017年2期)2017-06-01 12:21:50
石油化工建设(2016年4期)2016-02-27 15:03:14
石油知识(2015年6期)2015-02-28 16:19:12
测绘学报(2015年4期)2015-01-14 03:01:28
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28 12:21:31