
一种抑制牵引网压低频振荡的网侧变流器控制策略
2017-04-09 11:52:44葛兴来张呈象韩旭东李锐超
中国铁道科学 2017年6期
葛兴来,张呈象,韩旭东,李锐超
(1.西南交通大学 磁浮技术与磁浮列车教育部重点实验室,四川 成都 610031;2.西南交通大学 电气工程学院,四川 成都 610031)
近年来,随着我国铁路的飞速发展,越来越多的交—直—交传动电力机车和动车组投入运营,在我国电气化铁路多个机务段陆续出现牵引网压低频振荡事故,即当多辆机车或动车组在同一供电臂下运行时,由于车网电气耦合系统(简称车网系统)不稳定而造成牵引网压波动现象[1-3]。
目前国内外学者针对牵引网压低频振荡现象已经进行了一定的研究,文献[4]研究多台Re450 型机车引起的低频振荡现象,发现机车数量及其牵引传动系统网侧变流器(Line-Side Converter,LSC)的控制参数对该现象有很大影响;文献[3]和文献[5—7]对多台HXD1型电力机车接入牵引供电网时出现的低频振荡现象进行了简单的分析,研究了机车运行数量对牵引网压低频振荡的影响方式,并将低频振荡原因归纳为LSC控制系统的某些参数与牵引网参数不匹配;文献[8—10]针对牵引网压不稳定现象,通过解析和线性化处理以及利用小信号模型法,建立了LSC直流侧电压与交流侧电流之间的微变量关系,并探讨了LSC控制参数对牵引网压稳定性的影响;文献[11]通过设计基于自抗扰的非线性控制器,研究低频振荡现象的抑制。综合上述研究可以发现,目前大多数研究仍侧重于通过修改LSC控制参数以满足车网的匹配条件,而采用修改LSC控制参数的方法抑制低频振荡,可能恶化车网系统正常的运行性能,并且由于控制参数对于各方面的外界扰动都比较敏感,使得控制参数的调节难以达到理想的效果。
本文首先建立CRH3型动车组和牵引供电系统的车网系统模型,然后从动车组运行数量引起车网系统极点变化的角度分析低频振荡现象的产生原因和机理,在此基础上研究LSC多变量极点配置的控制策略,以取代传统的瞬态电流控制策略,最后通过仿真与半实物仿真实验平台验证理论分析结果和所提出的控制策略的有效性。
1 车网系统建模
1.1 主电路模型
低频振荡现象涉及牵引供电系统和动车组电力牵引传动系统两大系统。
对于牵引供电系统,在发生牵引网压低频振荡时,因为参与引发振荡的动车组集中在同一动车所,可以视作在牵引网的同一电气位置上并联了多辆动车组[12],所以在建立低频振荡模型时,将牵引供电系统(包括牵引网和变电所牵引变压器等)按戴维南等效为含有内阻的动车组外部电源,如图1所示。
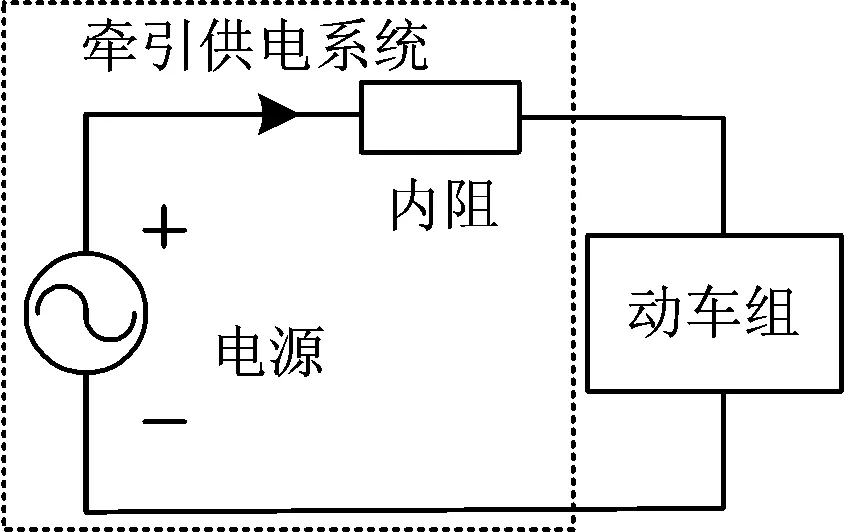
图1 牵引供电系统戴维南等效示意图
对于动车组电力牵引传动系统,主要由车载变压器、整流单元、中间直流环节、逆变器、牵引电机组成[13]。其中整流单元由2个相同的LSC构成两重化整流器,每个动车组上带有4个这样的整流单元。因为在发生低频振荡现象时,在线动车组处于空载或者轻载的工况,车载逆变器及牵引电机均不工作,中间直流环节负载只有辅助用电,可视为恒定电流源或阻性负载,所以在低频振荡情况下的动车组可以等效为带有较大电阻负载的变流器模型。
为了方便分析多车运行时系统的稳定性,假设同一供电臂下某点有n台CRH3型动车组同时运行,且所有动车组的电流均同步,则此时牵引网侧的电流是单台动车组运行时牵引网侧电流的n倍,可以等效为单个动力单元情况进行分析,即可以将多车的多个整流单元合并为单车的单个整流单元,此时单个整流单元所带负载变为原来的4n倍。由此可得等效的车网系统模型如图2所示。图中:us为折算到车载变压器副边的电源电压;Ls和Rs分别为牵引供电系统折算到变压器副边的等效电感和等效电阻;Lt和Rt分别为将动车组车载变压器的漏电感和漏电阻折算到变压器副边的等效电感和电阻;iac为LSC的输入电流;uin为车载变压器副边电压(简称变流器网侧电压);Cd为直流侧支撑电容;udc为LSC直流环节支撑电压;L2和C2分别为
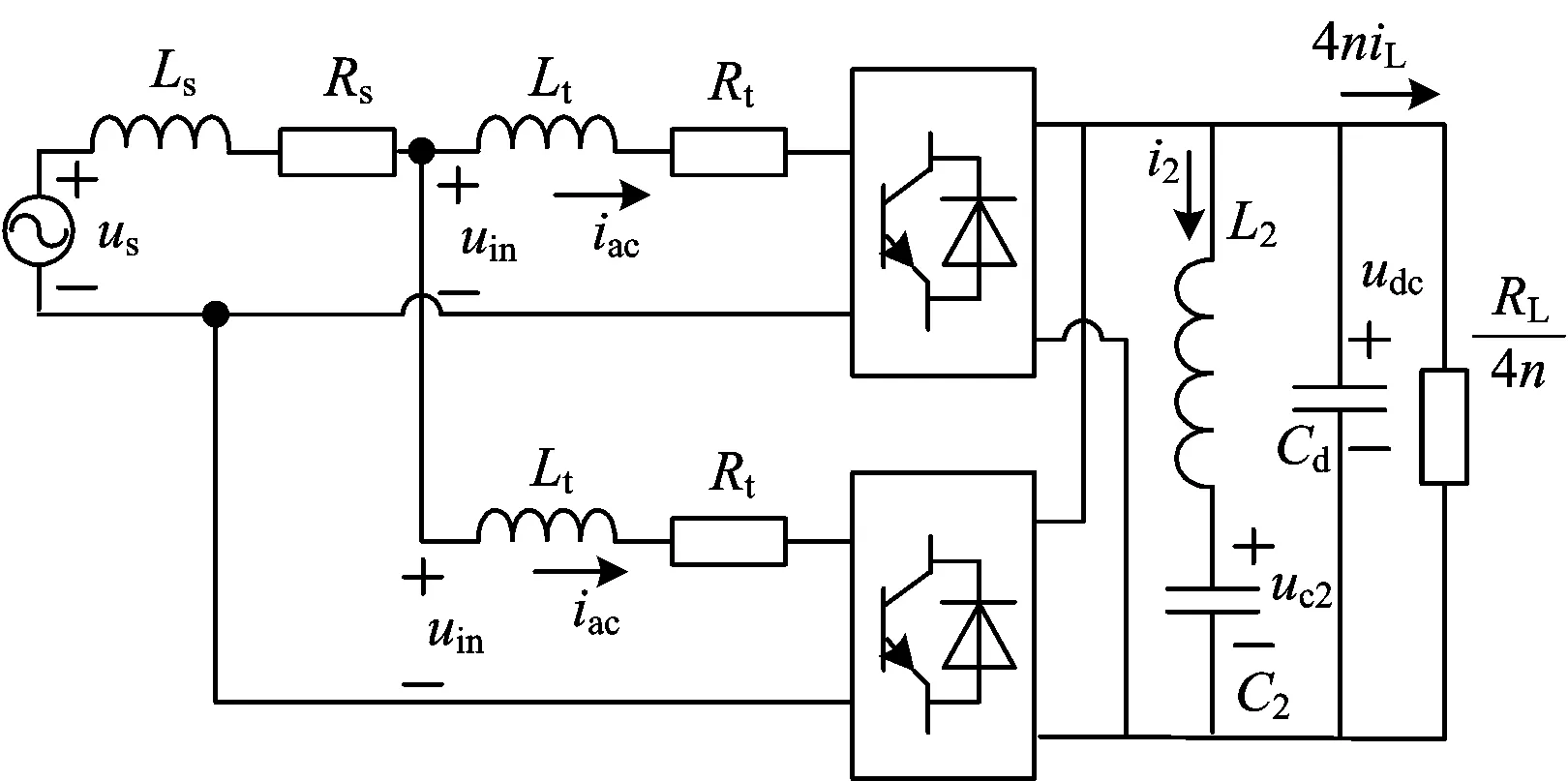
图2 车网电气耦合系统模型
二次滤波电路的电感和电容;i2为二次滤波电路的电流;uc2为滤波电容两端电压;RL为轻载时负载的等效电阻;iL为负载电流。
因两重整流器的各整流单元拓扑结构完全相同,故分析时只需针对单个脉冲整流器进行即可,另一个的情况与之完全相同。
1.2 既有的网侧变流器控制策略

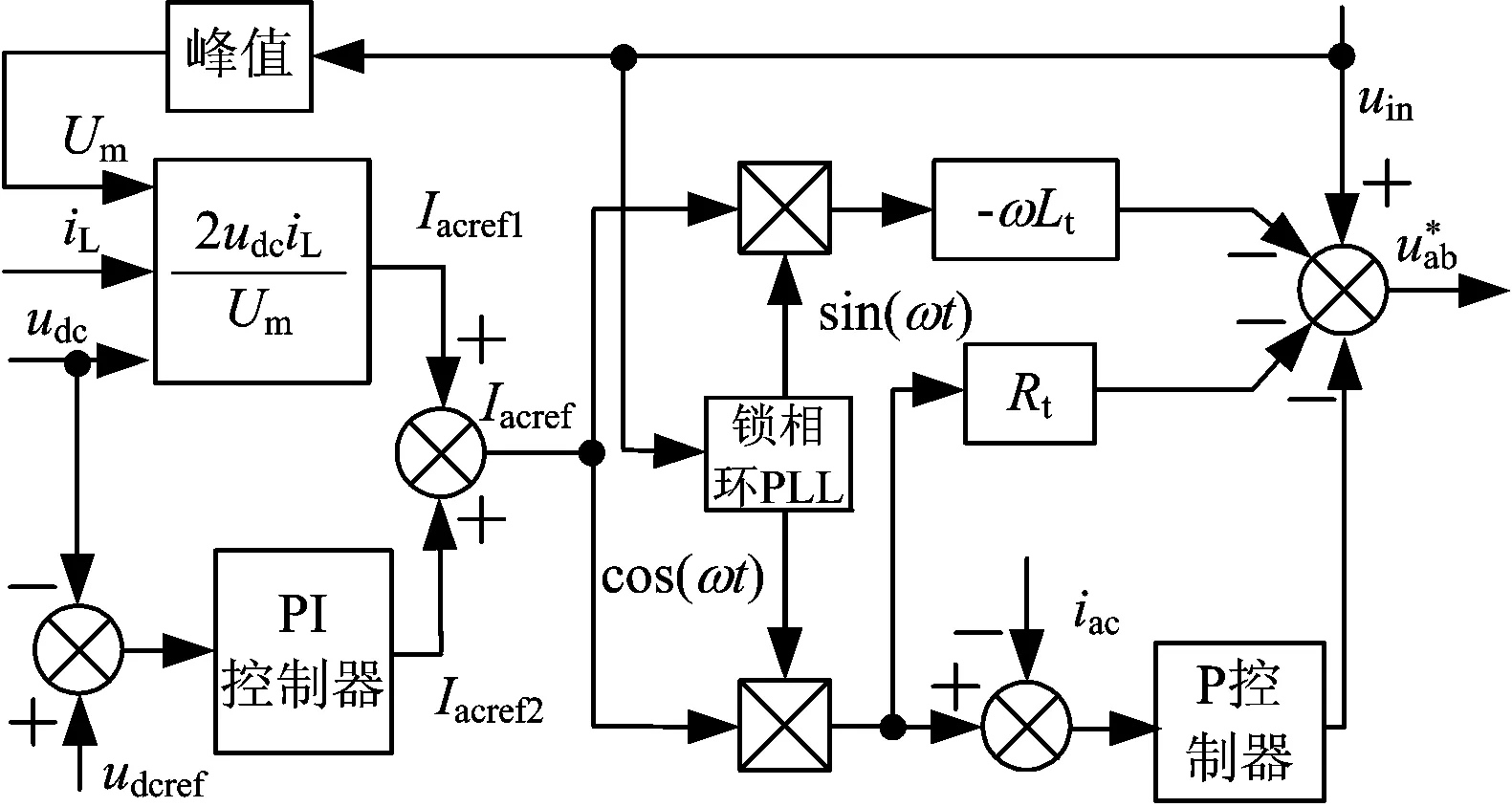
图3 瞬态电流控制策略
2 车网低频振荡机理分析
对于低频振荡现象可以从车网系统的稳定性进行分析。在复频域对车网系统进行稳定性分析时,考虑到变流器的非线性特性,先引入微增量在稳态运行点对其进行线性化处理,并根据变流器输入输出功率守恒,建立小信号模型,可得
(1)
其中,Zs=Rs+sLs,Zt=Rt+sLt,
式中:s为拉普拉斯算子;Zs为牵引供电系统折算到车载变压器副边的等效阻抗;Zt为车载变压器折算到副边的等效阻抗;Zdc为直流侧二次滤波器与支撑电容的并联阻抗。
式(1)中,因为L2C2的值非常小,为10-4数量级,对最终计算结果影响极小,可略去,所以对s2L2C2的忽略是合理的。
考虑瞬态过程,将非直流量用1个稳态直流分量和1个瞬态微变量的和表示,即
(2)
式中:Iac,Udc分别为线性化处理后的LSC输入电流和输出直流侧电压的静态直流分量;Δiac,Δudc分别为静态分量附近电流和电压的瞬态微变量。
将式(2)代入式(1)中,并将瞬态微变量与静态直流分量分离,得到小信号模型为
Δiacus-2(Zs+Zt)IacΔiac=
(3)
由式(3)可以得到直流环节输出电压与交流侧电流之间的传递函数H(s)为
(4)
若在LSC控制中采用电压电流双闭环的瞬态电流控制,则电压外环为了得到稳定的直流侧电压udc,一般采用PI控制器调节直流侧电压跟踪给定电压。PI控制器的开环传递函数HV(s)为
(5)
式中:KvP为电压环PI控制器的比例系数;KvI为电压环PI控制器的积分系数。
经过最佳参数整定的电流环可以等效为一阶惯性环节,闭环传递函数HI(s)为
(6)
式中:h为电流环闭环传递函数的惯性时间常数;KPWM为桥路PWM的等效增益系数,取为1[15];KiP为电流环P控制器的系数。
由式(4)—式(6)可以得到车网系统的闭环传递函数H1(s)为
(7)
其特征方程G(s)为
G(s)=1+HV(s)HI(s)H(s)=2ThUdc(Cd+C2)s3+[2Udc(Cd+C2)T+4niLhT-KvP(2Ls+2Lt)TIac]s2+{KvPT[us-(2Rs+2Rt)Iac]+4niLT-KvP(2Ls+2Lt)Iac}s+KvP[us-(2Rs+2Rt)Iac]
(8)
经过一系列的化简处理,最终车网系统被等效为1个三阶的线性定常系统,可采用分析系统阻尼比的方法对车网系统的稳定性进行研究。因为本文研究的问题为系统低频振荡,所以假定系统处于负阻尼状态或者欠阻尼状态,那么可以令系统的极点(闭环函数的特征根)为p1,p2和p3。
由下式可以得到车网系统的极点为
(9)
其中,a=2ThUdc(Cd+C2)
b=2Udc(Cd+C2)T+4niLhT-
KvP(2Ls+2Lt)TIac
c=KvP[us-(2Rs+2Rt)]TIac+
4niLT-KvP(2Ls+2Lt)Iac
d=KvP[us-KvP(2Ls+2Lt)Iac]
由极点与系统稳定性的关系可以知道,当系统稳定时,所有极点均位于复平面的左半平面,即实部为负;可当有极点位于复平面的右半平面,即极点实部为正时,则系统不稳定。当有极点位于虚轴时则处于临界稳定状态。由式(9)可知决定车网系统极点位置的因素有动车组数量n、脉冲整流器瞬态电流控制策略(PI控制器的参数KvP,KvI和KiP)、直流侧二次滤波环节等效阻抗Zdc、车载变压器等效阻抗Zt和牵引供电系统等效阻抗Zs。在实际运行中,主要变化因素是动车组数量,其他相关影响因素则相对固定。CRH3型动车组主电路和控制器的具体参数取值见表1[15]。
则由表1及式(9)可得到车网系统的极点变化轨迹与动车组数量的关系如图4所示。
从图4可以看出:采用传统顺态电流控制的动车组,极点p1基本在虚轴附近,处于临界稳定状态;随着动车组数量的增加就很容易出现不稳定情况,从而发生车网系统的低频振荡现象。
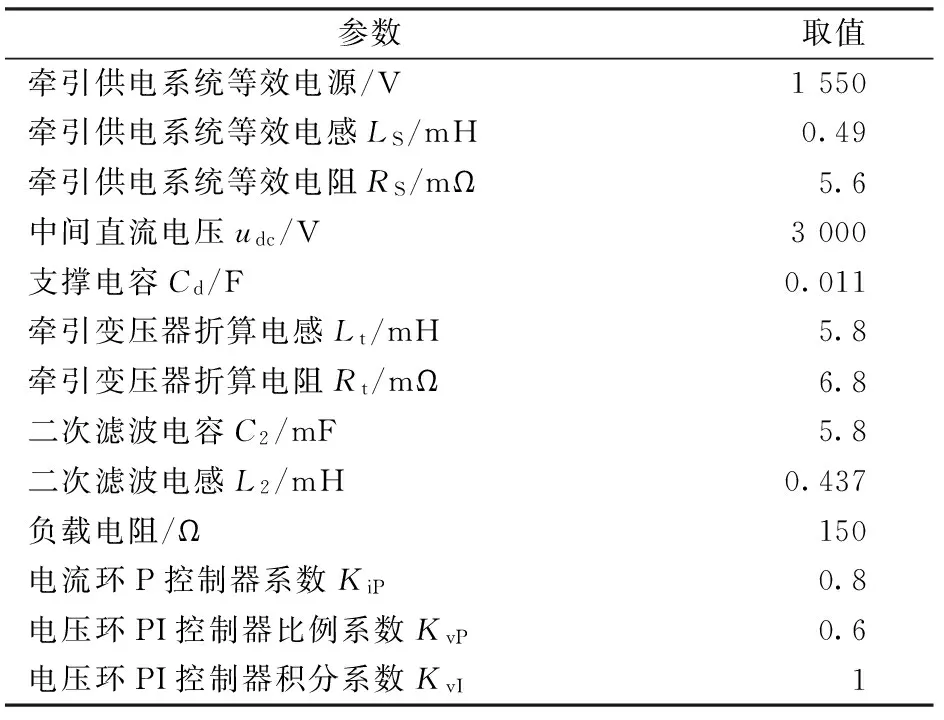
表1 CRH3型动车组主电路和控制电路的参数
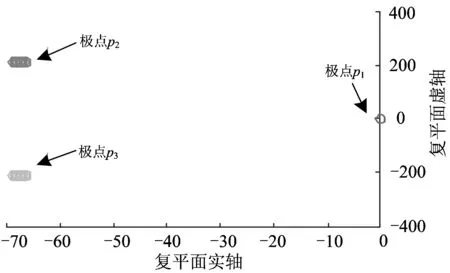
图4 极点变化轨迹
3 多变量极点配置控制策略
为抑制低频振荡,设计了LSC多变量极点配置控制策略如图5所示。图中:uab为控制器输出的作为整流器输入的控制量;uabff和uabfb分别为控制输出的前馈分量和反馈分量;i2ref和uc2ref分别为车网系统二次滤波环节电感电流与电容电压的参考值;udcref和iacref分别为直流侧电容电压以及网侧电流的参考值;uab为经过SPWM调制产生的PWM脉冲电压,用以控制整流器开关管的通断。
运用基尔霍夫定律,可以建立由4个一阶方程组成的车网系统数学模型,为
(10)
式中:m为SPWM的调制度。

图5 多变量极点配置控制策略
式(10)中,虽然将开关函数用调制度表示会给数学模型引入一定的误差,但是当系统的主导极点的实部在复平面上离虚轴较远时,这个误差可以忽略。
车网系统的输入为uab和交流侧电源电压us,us是1个恒压源,当系统的状态量改变时,只有uab能对多极点配置控制产生影响。由于可以将us产生的响应当成系统的零输入响应,属于系统固有性能,因此忽略us并不会对控制策略产生影响。为了方便理论分析和计算,可以将LSC数学模型简化并写成状态空间的形式,为
(11)
其中,
式中:x为车网系统的状态向量;A为系统矩阵;B为输入矩阵。
车网系统可以进行多变量极点配置的必要条件是系统是一个能控系统。运用线性定常系统状态完全能控的充要条件进行判断,其能控性的判别矩阵Wc为
(12)
3.1 参考值设计

(13)
LSC的控制目标之一是网侧电压电流同相位,则网侧电流参考值iacref为
(14)
LSC的输入电压uab和输入电流iac分别为
(15)
式中:φ为输入电压的相角;Uab和Iac分别为输入电压和输入电流的有效值。
LSC输入瞬时功率Pin为

(16)
由LSC输入输出瞬时功率的平衡关系可得直流侧输出电流idc为
(17)
LSC直流侧电流的两倍频脉动分量从这个谐振电路流过,而直流分量流入负载,从而得到稳定的中间直流回路电压。由此可以得到二次滤波环节电感电流参考值i2ref为
(18)
二次滤波环节与直流侧支撑电容并联,则可得到二次滤波环节电容电压参考值uc2ref为
(19)
3.2 极点配置
配置极点的方式采用的是状态反馈控制,通过二次线性最优控制理论[16],选取相对最优的反馈矩阵K,将系统的极点配置在预期的位置。再将4个状态量的误差量作为输入,通过反馈矩阵K,使得误差量调节为0,从而使车网系统达到稳定的控制和期望的性能。极点配置的输出量为脉冲整流器输入电压的反馈分量uabfb,即
uabfb=-K(x-xref)
(20)

为了减轻控制的压力,在控制LSC输入电压时引入前馈控制量uabff,为

(21)
由此可以得到输入电压uab为
uab=uabff+uabfb
(22)
3.3 有效性验证
在设计LSC控制器时,因为不会考虑多车同时运行的情况,所以取n=1,代入表1中参数,利用线性二次型最优控制(Linear Quadratic Regulator, LQR)求解反馈矩阵K,选取加权矩阵R=0.1,加权矩阵Q为

(23)
计算得到满足最优控制理论的状态反馈矩阵为
K=(-40.090.8-0.0021-0.336)
(24)
随着动车组数量n增加,在多变量极点配置控制器参数K不改变的情况下,采用多变量极点配置控制策略下车网系统的4个极点pg1—pg4见表2。表中:i为虚数单位。
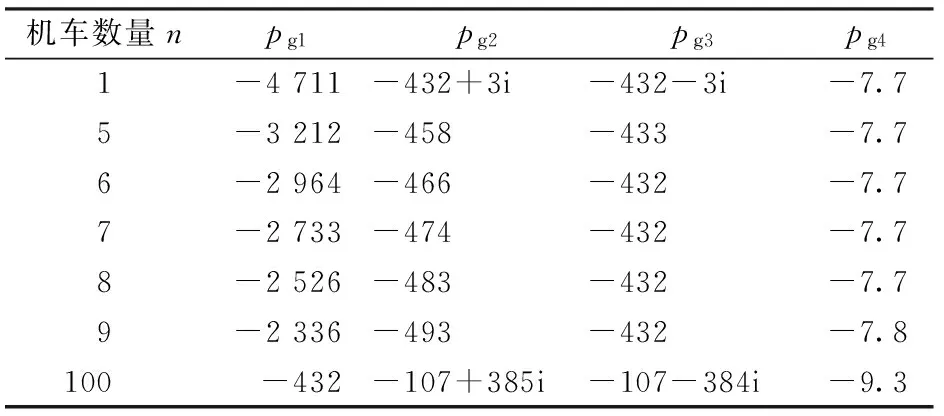
表2 不同动车组数量时车网系统极点
由表2可以看出:车网系统的主导极点pg4随动车组数量增加而远离虚轴,是对系统影响最小的极点;pg1随动车组数量增加渐渐靠近虚轴,但是变化幅度很小,当动车组数量增加到100时,该极点移动到-432的位置。由计算可知,任意通过最优控制理论选取的矩阵K,都能使系统的极点随动车组数量变化呈现这种规律。
由于改变动车组数量n对采用多变量极点配置控制的系统闭环传递函数主导极点几乎没有影响,所以,多变量极点配置是一种对低频振荡有抑制效果的控制策略。
4 仿真及试验结果
4.1 仿真结果
为了验证采用所建立的车网等效模型分析低频振荡的合理性,在MATLAB/Simulink平台搭建了车网系统模型,进行计算机仿真验证。模型参数取值见表1。
首先测试1个动车组接入牵引网的仿真现象,得到变压器一次侧总电流is和牵引供电系统等效无穷大电源的电压us波形如图6所示。

图6 n=1时交流侧总电流和牵引网压波形
由图6可以看到:电压、电流满足同频同相位,实现了对整流器单位功率因数的控制,此时车网系统处于稳定运行状态。
然后选定动车组数量为7进行仿真测试。图7为单个脉冲整流器的网侧电压、电流和直流侧电压的波形,在0.5 s时机车轻载运行,在经过短暂的时间之后,系统进入持续的低频振荡状态。振荡时网侧电压、电流的波形包络线呈正弦形,这相当于1个低频信号对50 Hz的网侧电压、电流进行了调制(波形相乘),而不是简单的低次谐波相加;网侧电压、电流的振荡规律和直流侧电压的振荡规律相同,属于3个电气量同步振荡;从直流侧电压波形容易观察到振荡的频率大约为12 Hz左右,属于低频振荡。
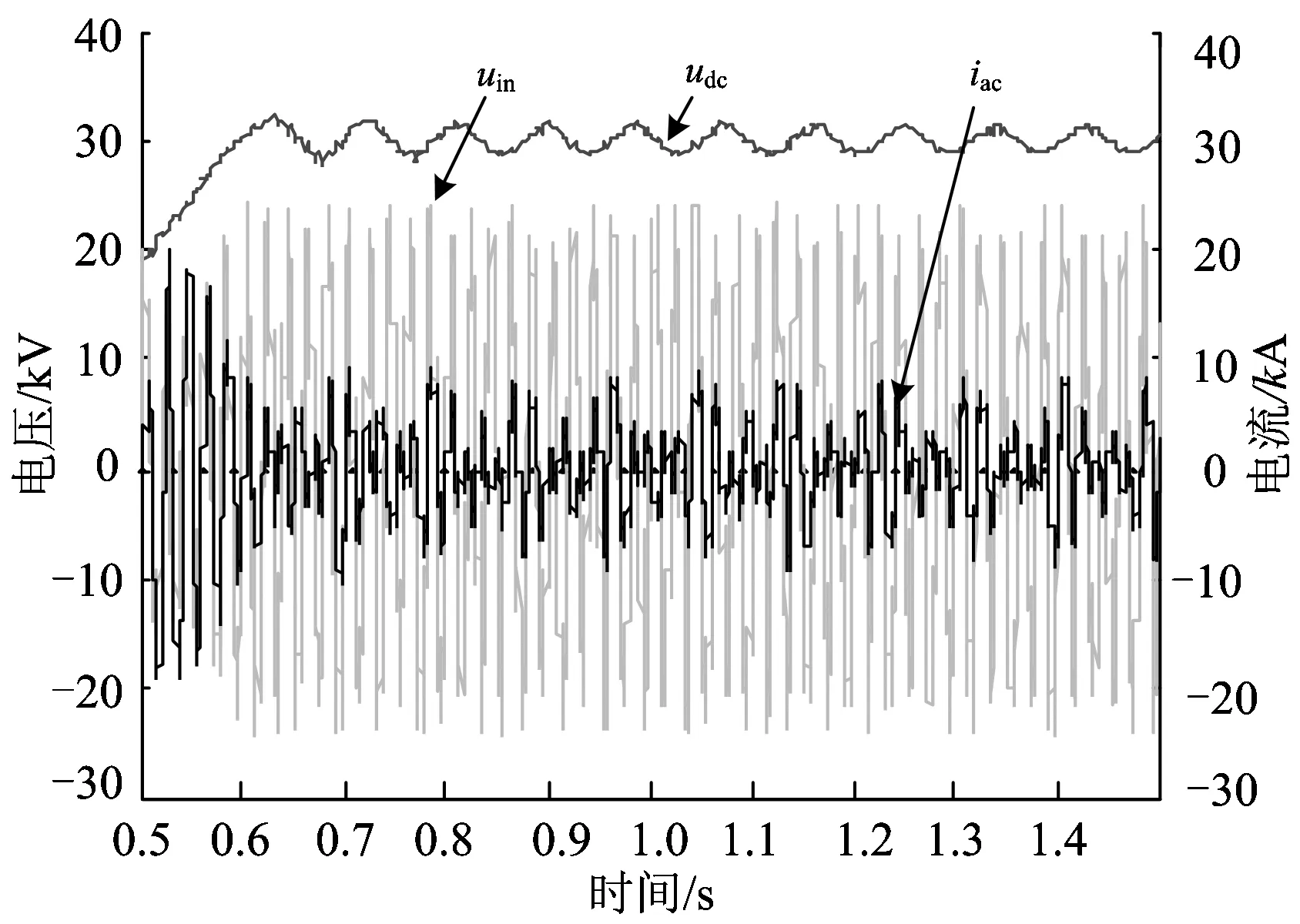
图7n=7时低频振荡下单个变流器的网侧电压、电流以及直流侧电压的波形
由上述仿真结果可以看到所建立的车网模型可以再现低频振荡现象,从而验证了所建立模型用于分析低频振荡的合理性。
4.2 试验结果
为了验证多变量极点配置控制策略对低频振荡现象的抑制能力,利用RT-LAB+DSP半实物仿真平台搭建了能够对控制算法进行测试的半实物实验模型[17]。
当LSC控制策略采用瞬态电流控制且CRH3型动车组数量n=7时,车网系统出现低频振荡现象。图8为低频振荡时,网侧电压、电流的波形。由图8可以看出:网侧电压、电流的包络线呈正弦状,且振荡规律相同。
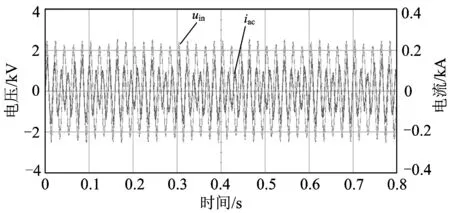
图8 瞬态电流控制下低频振荡时网侧电压、电流的波形
为了进一步观察网侧电压、电流的相位变化,取放大波形如图9所示。由图9可以看出:网侧电流相位变化较大,LSC在牵引工况和再生工况之间交互变化;在振荡幅度接近最大时,网侧电压和网侧电流几乎呈现相同的相位,在振荡幅度接近最小时,网侧电压和网侧电流呈现相反的相位。
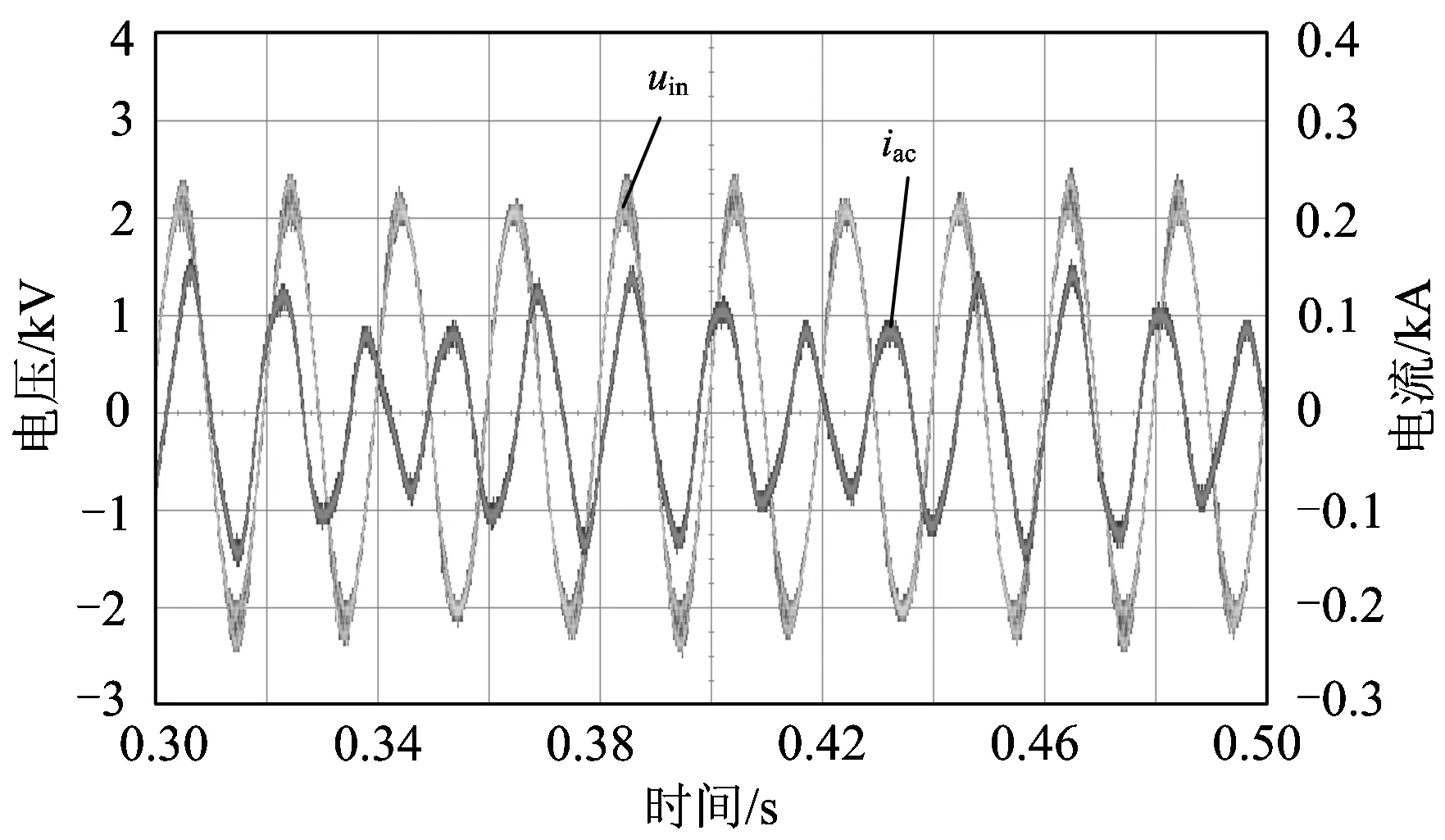
图9瞬态电流控制下低频振荡时网侧电压、电流的放大波形
振荡现象特征基本符合低频振荡现象特征,可以判断此时车网系统处于低频振荡状态。

图10 多变量极点配置控制下网侧电压、电流的波形
在同等条件下,将LSC控制策略切换成多变量极点配置控制策略后网侧电压、电流的波形如图10所示。由图10可以看出:低频振荡现象消失,网侧电压、电流保持同相位,LSC恢复稳定运行,说明了多变量极点配置控制策略抑制低频振荡的有效性。
5 结 语
通过搭建的车网等效模型,再现了低频振荡,验证了该模型用于分析低频振荡的合理性。针对CRH3型动车组多车启动引起的低频振荡,通过半实物仿真验证了LSC采用多变量极点配置控制策略对低频振荡现象有良好的抑制作用。
[1]中国铁道科学研究院,太原铁路局,北京交通大学,等.大秦线HXD1型机车车网匹配关系测试报告[R].北京:中国铁道科学研究院,2008.
[2]中国铁道科学研究院,上海南翔开闭所.CRH1067接触网电压电流测试报告[R].北京:中国铁道科学研究院,2010.
[3]王晖,吴命利.动车组引起牵引供电系统网压低频振荡现象测试及分析[C]//中国高等学校电力系统及其自动化专业第二十七届学术年会论文集.秦皇岛:中国电机工程学会,2011.
(WANG Hui,WU Mingli.The Measurement and Analysis of the Low Frequency Oscillation in Traction Power Supply System Caused by the EMU[C]//The 27th Chinese University Symposium on Power Electric System and Its Automation.Qinhuangdao:CSEE, 2011.in Chinese)
[4]MENTH S,MEYER M.Low Frequency Power Oscillations in Electric Railway Systems [J].Elektrische Bahnen,2006,104(5):216-221.
[5]郑琼林.交流传动HXD1电力机车谐振原因分析与对策[J].变频器世界,2009,6(5):40-44.
(ZHENG Qionglin.A Probe on Cause and Solutions of the HXD1 AC Locomotive’s Resonance[J].The World of Inverters,2009,6(5):40-44.in Chinese)
[6]韩智玲.浅析电力机车对牵引网电能质量的影响[J].电气传动,2010,40(4):41-42.
(HAN Zhiling.Brief Analysis of the Effects of Locomotive on the Quality of Electric Energy[J].Electric Drive,2010,40(4):41-42.in Chinese)
[7]HE Liqun,XIONG Jian,OUYANG Hui,et al.High-Performance Indirect Current Control Scheme for Railway Traction Four-Quadrant Converters [J].IEEE Transactions on Industrial Electronics,2014,61(12):6645-6654.
[8]韩智玲,唐蕾,李伟.交流传动电力机车车网电压不稳定的原因分析与解决[J].铁道学报,2011,33(10): 25-28.
(HAN Zhiling,TANG Lei,LI Wei.Causal Analysis and Resolution of the Voltage Instability between AC Drive Electric Locomotive and Power Supply Network [J].Journal of the China Railway Society,2011,33(10): 25-28.in Chinese)
[9]MORRIS Brenna,FEDERICA Foiadelli,DARIO Zaninelli.New Stability Analysis for Tuning PI Controller of Power Converters in Railway Application[J].IEEE Transactions on Industrial Electronics,2011,58(2):533-543.
[10]张桂南,刘志刚,向川,等.高铁车网耦合系统电压低频振荡现象机理研究[J].电网技术,2015,39(7): 1956-1962.
(ZHANG Guinan,LIU Zhigang,XIANG Chuan,et al.Mechanism on Voltage Low Frequency Oscillation of High-Speed Railway Traction Network and EMU Coupling System[J].Power System Technology,2015,39(7):1956-1962.in Chinese)
[11]姚书龙,刘志刚,张桂南,等.基于自抗扰控制的牵引网网压低频振荡抑制方法[J].电网技术,2016,40(1):207-213.
(YAO Shulong,LIU Zhigang,ZHANG Guinan,et al.A Novel Approach Based on ADRC to Traction Network Voltage Low Frequency Oscillation Suppression Research[J].Power System Technology,2016,40(1):207-213.in Chinese)
[12]吴命利. 电气化铁道牵引网的统一链式电路模型[J].中国电机工程学报,2010,30(28):52-58.
(WU Mingli.Uniform Chain Circuit Model for Traction Networks of Electric Railways[J].Proceedings of the CSEE,2010,30(28):52-58. in Chinese)
[13]崔恒斌,马志文,韩坤,等. 电动车组牵引传动系统的实时仿真研究[J]. 中国铁道科学,2011,32(6):94-101.
(CUI Hengbin, MA Zhiwen, HAN Kun,et al.Research on the Real-Time Simulation of the Traction Drive System in Electric Multiple Units [J].China Railway Science,2011,32(6):94-101. in Chinese)
[14]冯晓云.电力牵引交流传动及其控制系统[M].北京:高等教育出版社,2009.
[15]宋文胜,冯晓云.电力牵引交流传动控制与调制技术[M].北京:科学出版社,2014.
[16]肖建,张友刚.线性系统理论[M].成都:西南交通大学出版社,2011.
[17]丁荣军,桂卫华,陈高华. 电力机车交流传动系统的半实物实时仿真[J]. 中国铁道科学,2008,29(4):96-102.
(DING Rongjun,GUI Weihua, CHEN Gaohua. HIL Real-Time Simulation of Electric Locomotive AC Drive System[J].China Railway Science,2008,29(4):96-102. in Chinese)
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
防爆电机(2020年3期)2020-11-06 09:07:36
海峡姐妹(2020年2期)2020-03-03 13:36:34
山东冶金(2019年3期)2019-07-10 00:54:04
铁道通信信号(2018年11期)2019-01-19 01:14:54
消费导刊(2018年10期)2018-08-20 02:57:02
制造技术与机床(2017年12期)2017-02-02 07:05:03
铁道通信信号(2016年11期)2016-06-01 12:11:26
通信电源技术(2016年1期)2016-04-16 04:57:26
中国光学(2015年5期)2015-12-09 09:00:39
