基于MATLAB的操纵稳定性中间位置数据处理
2017-04-08 03:45:58张朝雷
河北软件职业技术学院学报 2017年1期
张朝雷
(1.长城汽车股份有限公司技术中心,河北保定 071000;2.河北省汽车工程技术研究中心,河北保定 071000)
基于MATLAB的操纵稳定性中间位置数据处理
张朝雷1,2
(1.长城汽车股份有限公司技术中心,河北保定 071000;2.河北省汽车工程技术研究中心,河北保定 071000)
基于MATLAB编制了中间位置数据处理程序,通过将连续正弦曲线的首尾数据做线性拟合得到趋势误差,并对原始数据进行矫正;设计了一个无相移低通滤波器,对原始数据进行滤波,避免了信号之间的相位延迟;设计了在4个连续正弦曲线中提取指定数据范围的程序,得到了方向盘转角和方向盘力矩4条滞环曲线拟合函数,对拟合函数求跟和求导,提取了方向盘转角迟滞、方向盘力矩迟滞、中间位置转向刚度等指标;对方向盘转角和横摆角速度做互相关性计算,得到横摆角速度响应时间。结果表明:通过这些数据处理方法的运用,保证了结果的准确性,提高了数据处理效率。
MATLAB;中间位置;滤波器;数据处理
0 引言
汽车操纵稳定性中间位置试验反应汽车中心区特性,对中间位置试验数据做处理并进行指标提取是个繁杂的过程,不同工程师的处理可能会得出不同的结果,这严重影响了车辆设计开发。本文基于MATLAB软件,编制了数据处理程序,详细介绍了数据处理过程,使整个中间位置试验数据处理结果准确而高效,同时也可为操纵稳定性其他测试工况的数据处理和分析提供参考。
1 试验方法
1.1 中间位置试验方法
测试参数有方向盘转角、方向盘力矩、横摆角速度、侧向加速度、车速。车辆以100km/h等速直线行驶,待车速稳定后开始记录数据,使方向盘转角保持初始位置数秒后给方向盘转角连续正弦输入,频率为0.2Hz,转角幅值足以使车辆侧向加速度峰值达到0.2G,整个试验过程使方向盘转角和通过中心区的角速度尽量保持一致,试验至少获取4个输入周期的数据,完成后将方向盘转角恢复到直行位置保持数秒后停止记录。
1.2 数据处理
对测试的参数绘制关系曲线回线组,回线组应以适当的方式进行平均,推荐的方法是在图1所示区间A内的试验曲线左右转(上下边),两部分分别进行多项式拟合,拟合阶次值为3。在进行数据处理时,首先确定数据横坐标区间,在该区间内按一定比例选取区间A,选取时应确保区间A足够大,以覆盖所关心的数据区域,但应避免两端的滞回效应的影响,其所占横坐标的比例推荐值为50%~70%[1]。
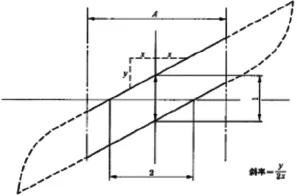
图1 滞环曲线示意图
2 MATLAB数据处理过程实现
根据试验数据特点和指标提取过程的要求构建数据处理流程框图,如图2所示。
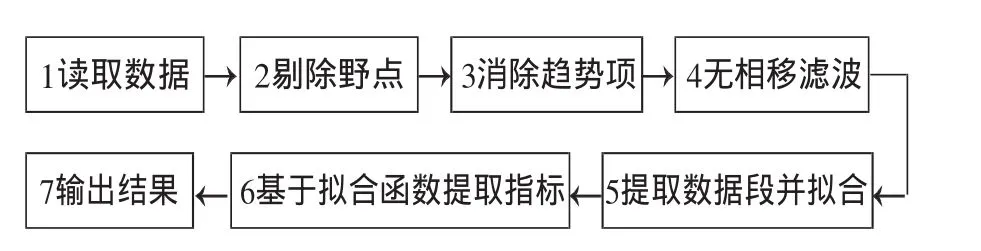
图2 数据处理流程图
2.1 读取数据
以Excel格式数据举例说明读取数据方法,用xlsread(‘filename’)函数读取Excel格式的试验数据付给data_y,用data_y(:,c)将data_y中所需信号提取出来,c表示信号位置在第几列,MATLAB程序实现如下:
data_y=xlsread('路径文件名.xls');%默认读取第1个工作薄中的数据
2.2 剔除野点
由于受场地的清洁度、天气、信号采集系统的电压波动等影响,试验数据会偶发突然的变化,俗称毛刺,对这样的异常数据点做修正或删除即可。
2.3 消除趋势项
受场地倾斜度、持续侧风、横摆角速度传感器的随机游走、测试系统温度变化等因素影响,持续时间比较长的连续正弦数据会产生一定趋势的偏移,对这种趋势需要加以修正。
定义连续正弦曲线开始和结束位置记录的零线时间长度,在此选择相同的时间长度0.5秒。分别求取前后位置零线的平均值,根据这两点幅值和首尾时间做1次项拟合线,将记录的数据减去此拟合线(如图3所示),MATLAB程序实现如下:

2.4 滤波处理

图3 消除趋势项曲线图
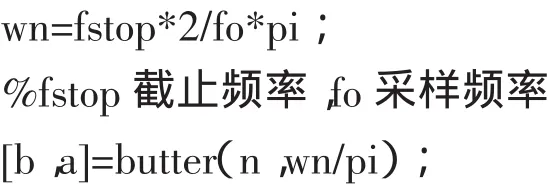
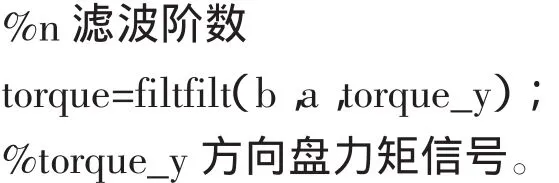
一般的数字滤波器滤波后都会产生相位延迟现象(如图4所示),使考察车辆瞬态响应特性产生误差。本文使用无相移滤波函数对原始数据滤波后,将滤波序列反折再次通过滤波器,并输出第2次滤波结果的时间反折序列,实现无相位延迟的滤波处理(如图5所示),MATLAB程序实现如下:

图4 数字滤波延迟
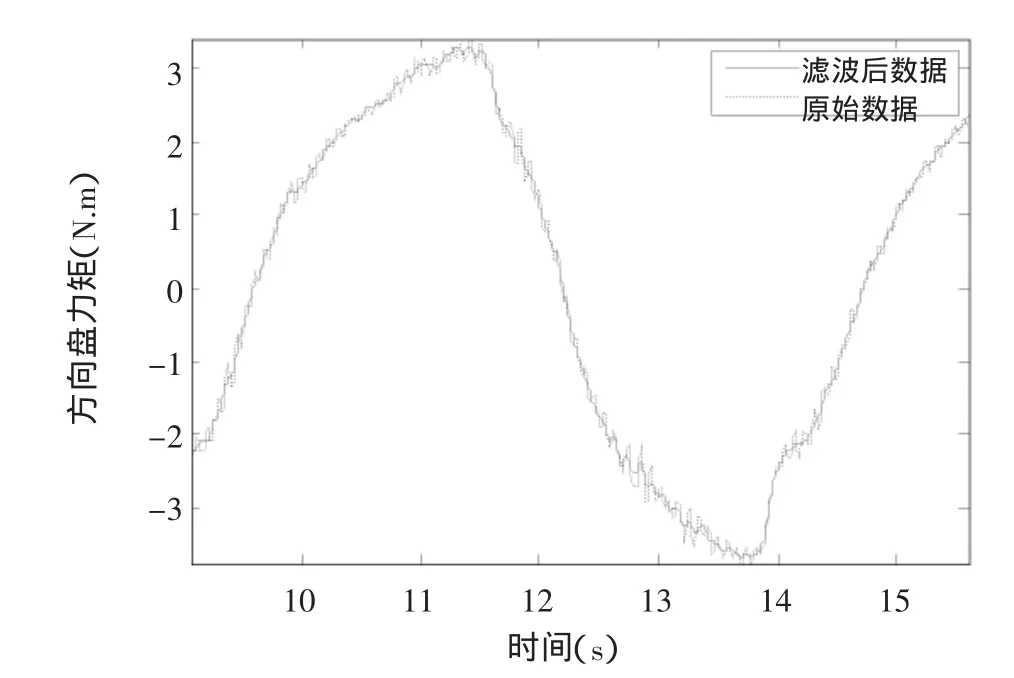
图5 无相移滤波
2.5 提取数据段拟合处理
以方向盘转角为例,在连续正弦的方向盘转角数据中选取用于指标提取的4个周期信号共8个数据段,4段是左转工况,4段是右转工况(如图6所示),MATLAB实现程序如下:

对滞环曲线的左转和右转分别进行多项式拟合,得到拟合函数nh1和nh2。


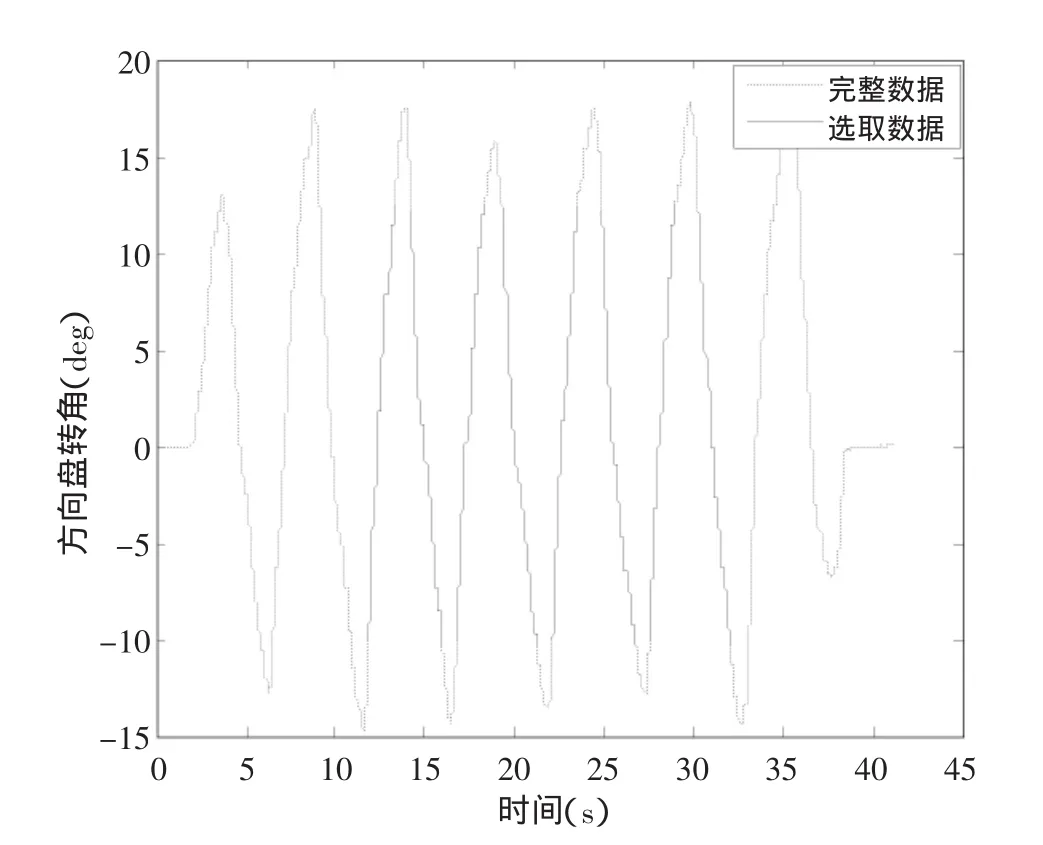
图6 试验数据的选取
2.6 提取评价指标
下面以方向盘力矩与方向盘转角关系曲线为例来说明评价指标的提取。
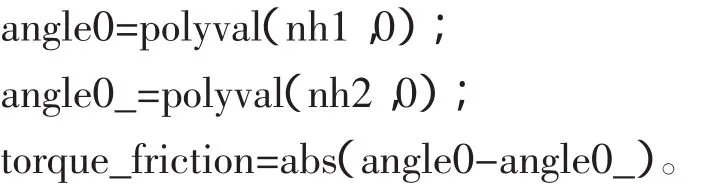
2.6.1 提取方向盘力矩迟滞
方向盘力矩迟滞是方向盘转角为0时的方向盘力矩,使用取值函数y=polyval(p,x),p是函数,x是自变量,对左右转拟合函数nh1和nh2取值即可得到方向盘力矩迟滞。MATLAB实现程序如下:
2.6.2 提取方向盘转角迟滞
方向盘转角迟滞是方向盘力矩为0时对应的方向盘转角,对左右转拟合函数分别求根。拟合函数阶次的不同会产生多个复数或实数根,要从根矩阵中提取出有效根。提取原则是有效根属于实数且大于区间A横轴的最小值小于区间A横轴的最大值。MATLAB实现程序如下:

2.6.3 提取中间位置转向刚度
使用求导函数k=polyder(p)对左右转滞环曲线拟合函数nh1和nh2求导函数,对导函数取值,当x等于0时,y值即为中间位置转向刚度。此种方法通过更改自变量x后同样可以提取侧向加速度为1m/s2时的力矩梯度,求导过程如下:

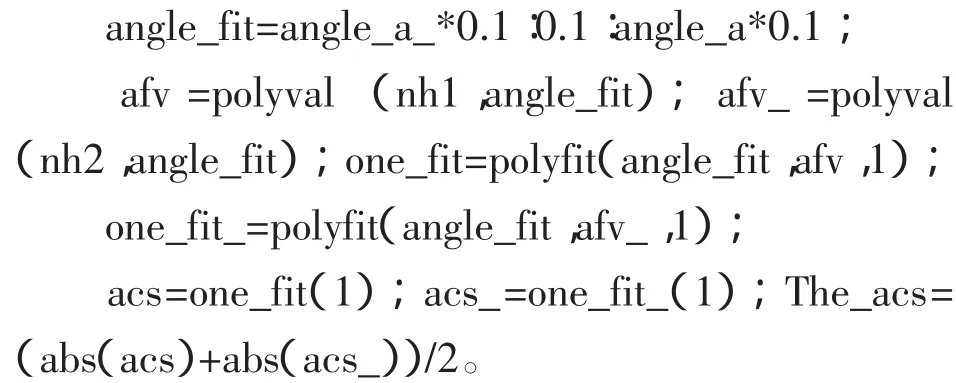
2.6.4 提取平均转向刚度
平均转向刚度是方向盘力矩与方向盘转角关系曲线中方向盘转角幅值±10%内曲线的斜率,对左右转的拟合曲线在转角±10%范围内做1次拟合,1次拟合线的斜率即为平均转向刚度,MATLAB程序实现如下:
2.6.5 提取横摆角速度响应迟滞
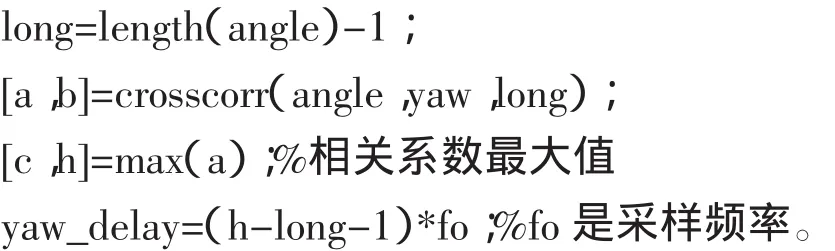
在横摆角速度和方向盘转角关系曲线中需要评价横摆角速度响应迟滞,由于这两个参数都是时域内的周期信号,所以可以利用两信号之间互相关函数计算得到横摆角速度的时间滞后,当两信号的互相关系数为最大时,所对应的时移乘以采样频率即为两信号之间的滞后时间(如图7所示)[3],实现程序如下:
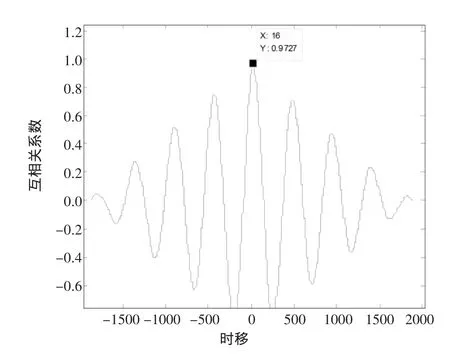
图7 横摆角速度与方向盘转角互相关系数
2.7 结果输出
指标提取完成后输出相关指标,绘制结果曲线如图8所示,输出评价指标见表1,结果输出程序如下:
中间位置其他指标的提取方法和以上介绍的方法相同,可以参考使用,至此完成了全部中间位置数据程序的编制。
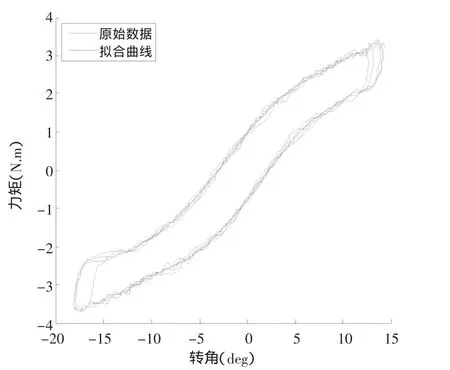
图8 方向盘力矩-转角关系曲线

表1 评价指标
3 结束语
本文基于MATLAB软件完成了对中间位置试验从数据读取、消除趋势项、无相移滤波到指标提取处理过程的编程,避免了人工处理产生错误的可能,大大提高了数据处理效率和数据的准确度,有效支撑了车辆操稳性能的开发。
[1]GB/6323-2014,汽车操纵稳定性试验方法[S].2014:31-32.
[2]孙祥,徐流美,吴清.matlab7.0基础教程[M].北京:清华大学出版社,2005:362-365.
[3]王长青.乘用车中心区操纵稳定性客观评价指标体系研究[D].长春:吉林大学,2012:51-52.
Handling on the center data processing based on MATLAB’s stability
ZHANG Zhao-lei1,2
(1.Great Wall Motor Company Technical Center,Hebei Baoding 071000,China;2.Hebei Automobile Engineering Technology Research Center,Hebei Baoding 071000,China)
The center data processing program is compiled based on MTALAB.By the end of data continuous sine curve linear fitting error trend,the original data is corrected; A low pass filter without phase shift is designed to wave filtering of raw data,it avoids the phase delay between the signals;A program is designed to extract the range of the specified data from four continuous sine curves,the fitting function of four hysteresis cures of steering wheel angle and steering wheel torque is obtained.The steering wheel angle hysteresis,steering wheel torque hysteresis,intermediate position steering stiffness and other indicators are extracted; Cross correlation calculation of steering wheel angle and yaw rate,get the yaw rate response time.Results show: Through the use of these data processing methods,ensure the accuracy of the results,improve the efficiency of data processing.
MATLAB;center;filter;data processing
TP274
A
1673-2022(2017)01-0063-05
2016-10-18
张朝雷(1984-),男,河北赵县人,助理工程师,研究方向为汽车操纵动力学。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
今日农业(2020年16期)2020-12-14 15:04:59
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
传媒评论(2017年8期)2017-11-08 01:47:36
解放军健康(2017年5期)2017-08-01 06:27:42
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
交通建设与管理(2015年13期)2015-03-20 15:18:48