
半球谐振陀螺的拉格朗日力学建模方法
2017-04-08 21:06金鑫满春涛
哈尔滨理工大学学报 2017年1期
金鑫 满春涛


摘要:陀螺仪是惯性技术的核心元件,半球谐振陀螺已成为空间应用的首选之一。对半球谐振子进行详细的动力学模型建立是研究其原理的基础。将半球谐振子视为半球弹性薄壳,求取其弹性伸长量及角变从而求得弹性薄壳的弹性势能,进而采用基于虚功原理和变分法的拉格朗日力学方法,求取弹性薄壳的动能,代入拉格朗日算子建立拉格朗日方程,得到系统整体的动力学模型。建模过程中通过广义坐标的选取,使最终模型等效为质量块在二维空间的简谐振动的等效模型,从而简化对半球谐振陀螺的分析。
关键词:半球谐振陀螺;动力学建模;弹性薄壳;拉格朗日力学
中图分类号:V249.32 文献标志码:A 文章编号:1007-2683(2017)01-0041-07
0 引言
作为惯性技术核心的惯性敏感元件,陀螺仪已经被应用于国防和民用的多个领域,包括导弹、飞机、潜艇制导,卫星姿态控制,石油、矿藏开采,海底电缆铺设等众多方面。半球谐振陀螺是固态振动陀螺中最典型的一种,因其谐振子为半球形而得名。半球谐振陀螺因其具有易小型化和抗冲击能力强的特点而成为空间应用的首选惯性器件之一,而陀螺仪的精度是决定系统性能的主要因素,因此需要对陀螺仪进行详细的建模和性能分析。本文主要研究半球谐振陀螺振动模态的动力学模型建立方法,为研究半球谐振子中受哥式力影响产生进动的原理打下良好的基础。
从半球谐振陀螺问世至今,国内外学者对半球諧振陀螺建模进行了积极的研究,并发表了与之相关的大量文章。学者Michael Y.Shatalov研究了中空的各向同性球体在充满非粘滞性介质时的陀螺效应,为求取系统的进动因子,首先假设外界转动频率远小于系统最低的谐振频率从而将惯性力忽略,然后采用复函数的方法得到进动因子。学者Michael Y.Shatalov又研究了质量不平衡球体慢速旋转时驻波的进动角速率的影响因素,发现进动角速率不受阻尼的影响但受正交振型和外界输入大小的影响,正交项的存在会出现驻波的捕获效应,使得进动成周期性的变化而不是与外界输入成比例。学者C.O.Chang对半球体波的进动情况采用摄动法进行建模,分析驻波谐振频率及进动因子的影响因素,发现驻波的谐振频率受离心力影响,而进动因子则不受影响。学者樊尚春采用Lord Rayleigh中面不扩张理论,研究了等厚度和变厚度的轴对称壳体中驻波的进动情况,给出了振动模态的进动因子与谐振频率的具体解析表达式。学者Jiayi Qi等研究了半球谐振陀螺的进动因子和谐振频率并根据薄壳理论给出了表达式。这些研究成果的理论分析非常全面,对半球谐振陀螺的研究有很大的促进作用,不足之处主要是因建模采取古典力学理论而表达式都非常的复杂,没有清晰的动力学模型建模方法。
本文在借鉴这些理论研究的成果上,依据薄壳振动理论,得出半球谐振陀螺的基本运动方程;基于虚功原理与变分法采用拉格朗日方程对半球谐振陀螺的谐振子进动情况进行了详细地建模研究,得出了将半球谐振子复杂进动模型等效为广义空间上一个质点二维简谐振动的模型,使半球谐振陀螺的模型得到了简化。
1 系统建模
1.1 半球谐振子建模假设
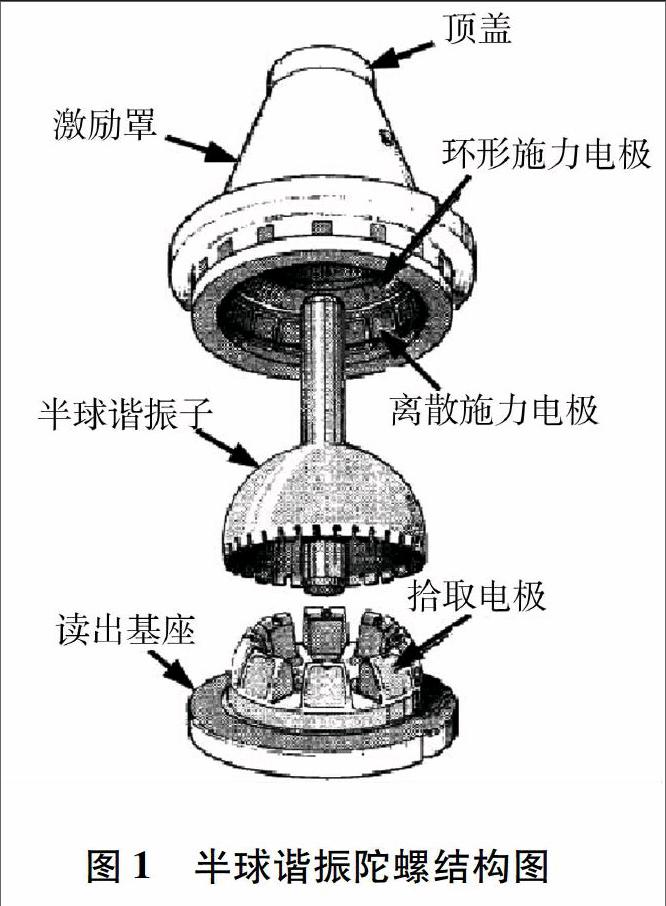
半球谐振陀螺的机理主要是利用谐振子的布莱恩效应,即当一个振荡的轴对称壳体绕其对称中心轴旋转时,环向振型不再相对壳体静止,而是相对壳体成比例地进动。半球谐振陀螺结构如图1所示。
为了得出理想状态下谐振子的进动因子,并建立理想条件下的谐振子进动模型,首先假设外界转动频率远小于谐振子的固有振动频率,谐振子的转动离心力可以忽略,离心力不影响谐振子的进动因子。并且假设石英的阻尼系数不加以考虑,因为阻尼系数亦不会影响谐振子的进动因子。谐振子的不完美,如质量不平衡,非等弹性等因素也先不加以考虑,其目的是为了首先得出理想条件下半球谐振陀螺的动力学模型,在此基础上再分析各误差项对半球谐振陀螺的影响。
对谐振子动力学的分析主要是建立在薄壳理论的基础之上,由LOVE提出的薄壳理论最著名的几点假设分别为:
1)壳体的厚度远小于壳体的其他尺寸,比如中面半径;
2)变形与位移足够的小以至于变形量与位移量的二阶和高阶量相对于一阶;
3)平行于中面的法向应力与其它应力相比,可以忽略不计,此假设可以称之为壳层无挤压假设;
4)变形前垂直于中面的直线在变形后仍然是直的,且与变形后的中面垂直,长度保持不变。
半球谐振陀螺工作时半球谐振子处于微幅振动状态,其振动位移条件满足以上4点假设,因此本文基于以上假设建立半球谐振陀螺的动力学模型。
1.2 半球谐振子球壳的基本方程
半球谐振子壳体中面如图2所示,在半球壳体中,中曲面的两个主曲率半径都为r,曲率坐标系选取为纬度角φ和经度角θ作为参数。
基于薄壳理论,半球谐振子中面上的任何点可以用如下坐标表示:
r=r(φ,θ) (1)其中r是参数φ,θ的单值连续函数。依次给定θ一系列定值,同时连续改变φ,可以在曲面上得到一簇曲线;同样依次给定φ一系列的定值同时变化φ就得到另外一簇曲线,则φ,θ为曲面的曲率坐标系。r对φ,θ的导数为rφ和rθ,在曲面的每一点上分别与φ,θ线相切。rφ和rθ的长度A,B称为曲面的拉梅系数,一般为φ,θ的函数,它们表示曲面的几何性质,球面坐标系下壳体的拉梅系数分别为
(2)
考虑球壳的变形,如图3所示。
向量ds表示曲面上点P形变前与相变后之间的弧长增量:
(3)
由于曲率坐标系φ,θ为正交系,此线段的长度为
(4)
可得到沿φ坐标线和θ坐标线的弧长增量分别为
(5)
分别为与参变量dφ,dθ相对应的弧长增量。设半球壳中面在φ线,θ线和中面法线Z方向的位移分量分别为u,v,w,变形前壳中面的坐标向量为r,变形后的坐标向量为r',如图3所示,则r'可以表示为
(6)
由向量ds及其沿φ、θ切向弧长的表达式可以求得φ、θ切向及Z方向的3个单位向量e1,e2和en分别如下:
(7)
e1,e2和en为服从右手螺旋法则的正交坐标系,且en指向曲面突起的一侧。由此可得r'的微商向量为
(8)
其中,
(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
(22)
(23)
(24)
(25)
(26)
(27)
(28)
以上几个方程确定了半球谐振陀螺的壳层上任意点在φ线及θ线方向上的伸长率及其角变。在实际计算中,可以将上述几个式子的分母用泰勒级数展开,略去z的二阶以上小量,得到化简的式子为
(29)
(30)
(31)
式(30)、(31)即为半球谐振子壳层上任意点在φ线及θ线方向上的伸长率及其角变,代表了半球谐振子的基本运动,是后续求取弹性薄壳弹性势能所必须的基本量,以上的推导过程是后续求取壳体系统动力学模型的基础。
1.3 拉格朗日方程法建立壳体动力学模型
设谐振子中面面半径为r,厚度为h,密度为p,θ,φ分别为经度角与纬度角,笛卡尔坐标系原点与球心重合,如图1所示,则中面上一点可以表示为
(32)
3个标量方程在曲率坐标系下等价于向量方程式(1)。半球壳中面上任一点变形时的位移矢量可以表示为
△=ui+vj+uk (33)
中面上的点变形后的坐标向量为
r'=ui+vj+(r+w)k (34)
谐振子沿Z轴的转动速率为Ω,其大小远小于陀螺的固有谐振频率。则对于质点p将Ω投影到i,j,k局部坐标系中为:
(35)
(36)
(37)
(38)
(39)
(40)
依據推导的半球谐振子基本方程,将半球壳曲面的线微原伸长率和曲率变化代入薄壳弹性势能,沿壳层厚度积分,略去高阶小量并进行化简,可得到壳体的弹性势能为
(41)
(42)
(43)
(44)
(45)
(46)
(47)
(48)
(49)
(50)
(51)
(52)
此式是半球谐振陀螺的二阶模态振动方程,模态的幅值满足一个二阶线性并与外界输入角速率有耦合项的微分方程。此方程表示的等价系统为一个质量块在二维空间的简谐振动方程,如图4所示。
(C,S)可以定义为半球谐振子的广义坐标,(C,S)表示二维空间中质量块的广义位移。质量块m在二维空间中以一椭圆轨迹运动,其周期为T=2π/ω。在垂直于(C,S)平面的外界角速度Ω的激励下,椭圆的长轴方位角以速率kΩ/2相对惯性空间产牛进动。
3 结论
本文基于弹性薄壳理论及拉格朗日方程方法,建立了半球谐振陀螺谐振子在振动模态的动力学方程,该方法以古典的弹性薄壳理论为基础,推导出半球形薄壳的基本伸长率和角变,并结合拉格朗日力学,通过计算壳体的动能与势能建立拉格朗日方程,得到谐振子整体的动力学方程,并且通过选取广义坐标,使系统模型等效为质量块在二维空间简谐振动的模型,解决了以往的模型过于复杂且物理意义不明显的问题。
(编辑:温泽宇)
