
基于ARM及蓝牙技术的智能搬运机器人
2017-04-08 16:01杨华吴敏
数字技术与应用 2017年2期
杨华++吴敏

摘要:设计制作一个智能搬运机器人,可类人站立,选择双轮自平衡方案,由于两轮共轴、独立驱动、车身重心位于车轮轴上方,通过运动保持平衡,可以直立运动,对于地形的变化也有很强的适应能力,有着良好的运动性能,因此选择用来做搬运机器人的主要结构最合适,而且便与收纳并支持蓝牙控制。
关键词:机器人;蓝牙;自平衡
中圖分类号:TP393 文献标识码:A 文章编号:1007-9416(2017)02-0004-02
1 引言
现实生活中,搬运机器人节省我们人类劳动力是个远大的理想,采用双电机驱动自平衡巧妙地利用地心引力使其自身保持平衡,并将自身重力转换成动能,便于移动,具有环保的特点。另外搬运机器人小巧,转弯灵活,可以在狭窄、大转角的工作场合作业,也可以在陆地上快速移动并进行物品的搬运,我们可以通过手机APP进行操作控制,指引机器人向目的地前进,可以在工厂、学校、餐厅、家庭中广泛使用。另外搬运机器人有个显著的特点在于,单个搬运数量并不多,但是当机器人数量越多则搬运货物体积越大,数量也越多,比如搬运集装箱,底下可以放置很多个机器人一起行动。这类体积小巧的机器人便于收纳,完全弥补生产产线需要设计高成本产线设备的缺点,随时可以取出应用。
2 整体功能
本设计的控制驱动电路板是整个搬运机器人组成的核心,根据查阅资料搜索双轮自平衡的功能特点,选择MPU-6050这款6轴运动处理传感器采集车体的状态信息;选择TB6612这款直流电机驱动芯片进行双电机驱动;选择光电编码器采集车体速度信息;选择370金属齿轮直流减速电机;控制器采用STM32单片机完成数据采集与处理、车体状态信息判断、直流减速电机控制及蓝牙与手机APP通讯控制等功能。具体结构框图如图1所示。
3 控制系统硬件设计
3.1 系统主控芯片
选用意法半导体公司的STM32F103C8T6作为主控芯片,该芯片集成的I2C总线模块对于传感器MPU-6050的控制较为方便。对传感器MPU-6050输出的加速度信号和陀螺仪信号进行采集;对加速度信号和陀螺仪信号进行数据融合,计算出车体即时的倾斜角度;对于两个车轮上安装的光栅编码器,由于其输出两路AB相信号,进行采集之后得到小车运动速度及方向信息;利用数字PID算法得出PWM信号来控制电机驱动模块,对小车行进中倾斜角进行调整,从而实现小车的自平衡控制。
3.2 6轴运动传感器
MPU-6050是6轴运动传感器,拥有3轴MEMS陀螺仪、3轴MEMS加速度计和一个可扩展的运动数字处理器(DPM),其内部对陀螺仪和加速度计分别使用3个16位ADC,检测输出的16位数字量,通过I2C总线接口输出,能精确跟踪快速和慢速运动,还能设定陀螺仪和加速度传感器的测量范围。
3.3 直流电机驱动电路
TB6612FNG是电机驱动芯片,能独立控制2个直流电机,具有集成度高、输出驱动能力强等特点,每通道输出最高1.2A的连续驱动电流,启动峰值电流达2A/3.2A,有正转/反转/制动/停止4种电机控制模式,PWM支持频率高达100kHz,在集成化、小型化的电机控制系统中,是一种理想的电机驱动器件。
3.4 电机及编码器模块
选用370电机,该电机自带编码器,由于编码器采用集电极开路输出,输出波形为矩形波,因此编码器外围电路较简单。使用时在信号输出端需要接入一个上拉电阻,即可将信号提供给单片机进行采集数据。我们设PULSE引脚为编码器A相,接单片机的脉冲计数口,通过单片机的PACNT模块对输入脉冲进行计数从而获取电机转速。DIR为编码器B相输出,接单片机I/O口,通过A、B相位差进行软件鉴相,从而判断电机转动方向。
3.5 蓝牙控制模块
系统采用无线(蓝牙)模块,实现双向通讯传输,拥有2.4G无线通信接口,与手机进行通信,并通过手机来进行控制,蓝牙模块是现成的蓝牙串口模块,开发方便,具有强抗干扰能力,发射功率微小。完全符合辐射和距离要求。蓝牙模块是自动连接的,可用手机蓝牙控制。
3.6 供电电路
本设计使用3节18650锂电池供电,供电电压约12V,供电电路将电源电压转换成3.3V供主控芯片和传感器电路使用。由于电机的功耗较大,起制动时会引起电源电压的波动,所以电路设计滤波电路稳定电压输出。
4 控制系统软件设计
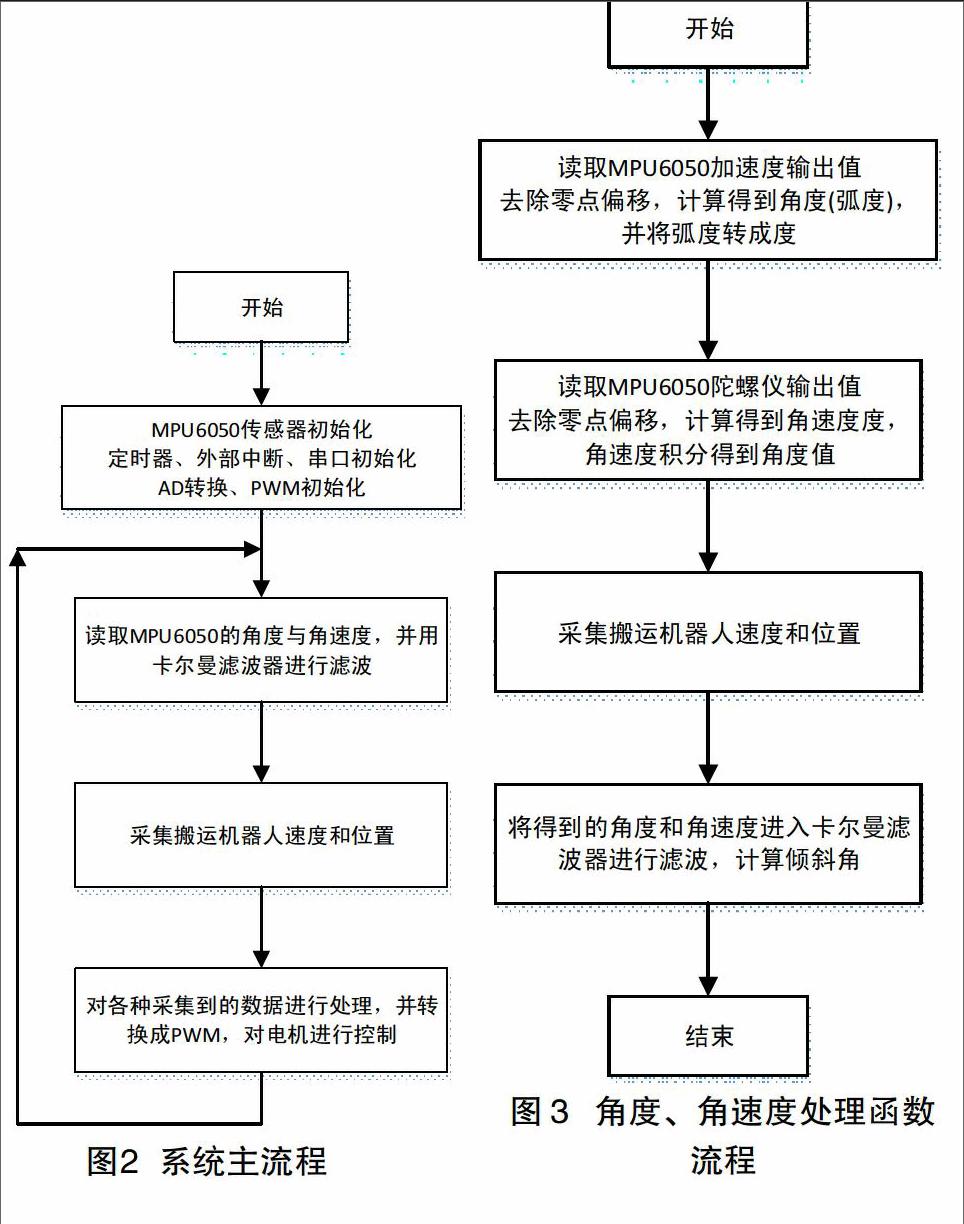
程序设计是作品设计的核心部分,系统采用C语言编写,采用模块化的程序设计方法,主要包括6轴运动传感器MPU-6050、TB6612FNG直流电机驱动、蓝牙模块、卡尔曼滤波器控制等主控程序,手机APP控制两大部分。程序主要包含有无线蓝牙数据接收、加速、减速、平衡数据处理等。为了保证系统的可靠性及安全性还需对电路过流、发送/接收地址数据不匹配等进行相应的处理。现画出系统主程序流程图(见图2)和角度、角速度处理函数流程图(见图3)。
5 结语
企业工厂在产品流水线最后一道关卡,当产品制作完成需要进行运输包装时,常见的无非是人工搬运、大型生产自动线的传送,对于人工搬运,生产效率会降低,若专门请人搬运,又占用一个工作岗位;对于大型生产线的使用,又需要考虑设备成本及人工操作,而且设备必然占用地方空间,因此,体积小巧的搬运机器人应运而生,在地面上灵活机动、成本低廉、可以批量使用,类似蚂蚁搬运,一个搬运机器人的力量是渺小的,一群搬运机器人的力量是强大的,使用完后搬运机器人还能随时进行收纳以备下次继续使用,不占用场地空间。
不仅仅在工厂中使用,在学校、餐厅、家庭中均可以被广泛使用,在学校可以作为搬运快递机器人使用,在餐厅可以作为传菜员使用,家庭中同样可以传递物品,最重要的是小朋友喜欢。
由于市面上除了见到机器人餐厅,使用的是巡线机器人托盘运动,其他工厂企业、学校并不看见这类搬运机器人,因此市场前景较为可观。
参考文献
[1]肖成.基于S3C2440的嵌入式智能小车控制系统设计[J].软件开发与设计,2011(5).
猜你喜欢
工业设计(2022年7期)2022-08-12
金桥(2019年10期)2019-08-13
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
家庭影院技术(2017年10期)2017-03-24
玩具世界(2017年8期)2017-02-06
工业设计(2016年11期)2016-04-16
