
装载机结构件疲劳试验机的设计
2017-04-07 08:03:47蔡应强肖龙海
华侨大学学报(自然科学版) 2017年2期
蔡应强, 肖龙海
(1. 集美大学 轮机工程学院, 福建 厦门 361021;2. 华侨大学 机电及自动化学院, 福建 厦门 361021;3. 福建省船舶与海洋工程重点实验室, 福建 厦门 361021)
装载机结构件疲劳试验机的设计
蔡应强1,2,3, 肖龙海1,2,3
(1. 集美大学 轮机工程学院, 福建 厦门 361021;2. 华侨大学 机电及自动化学院, 福建 厦门 361021;3. 福建省船舶与海洋工程重点实验室, 福建 厦门 361021)
为了查找装载机结构件应力薄弱部位,优化结构设计、提高疲劳寿命,采用电液伺服技术和可编程逻辑控制器(PLC)控制技术设计一套专门测试结构件疲劳强度的试验系统.该系统采用整机正面加侧面的加载方案,由触摸屏和PLC控制器远程控制2个伺服液压缸动作以模拟结构件受载,可实现24 h无人值守试验,适用于各种型号装载机结构件的疲劳试验.试验结果表明:该试验机运转平稳,可靠性高. 关键词: 疲劳试验机; 装载机; 结构件; 电液伺服; 远程控制
装载机工况复杂,车架和动臂等结构件在作业过程中承受着动力装置传递的力矩载荷、工作阻力载荷、恶劣路况的冲击载荷等,在应力薄弱部位易发生疲劳破坏[1].目前,在设计阶段,一般以最危险载荷为设计载荷,以有限单元法寻找最大应力区与最大变形区,以便在结构设计上增强薄弱部位[2].而结构件的疲劳失效在设计阶段难以处理,只有通过大量市场反馈信息改进[3],成本高、周期长、数据滞后,不利于新机型的推广应用.考虑到装载机作业载荷以低频、大振幅、重载荷为主,本文设计电液驱动型疲劳试验机,通过模拟其典型工况下的负载,获取试验样机结构件的应力分布数据和疲劳失效数据,为发现设计缺陷和结构优化提供可靠依据.
1 加载方案和参数的确定
1.1 试验机结构方案
轮式装载机的工作循环包括插入、铲装、举升、卸载4个作业过程,需要依次克服插入阻力、转斗阻力矩、掘起阻力和卸载阻力等[4-5].上述作业阻力直接作用于铲斗,并通过铰链传递到动臂、车架等结构件.由于路况复杂、随机作业载荷波动剧烈等原因,车架、动臂等结构件容易发生疲劳断裂.王继新等[6]对正载、左偏载、右偏载、满载转弯、一后轮离地、满载制动、满载运输、满载动臂平伸、满载举升最高位置等17种工况做了应力对比分析.结果表明:各工况下结构件应力较大的位置基本相同,其中,应力较大的工况是正载铲掘作业、偏载铲掘作业及有侧向力铲掘的作业工况.
以此为出发点模拟受载,考虑到台架试验的可行性,将装载机整车(去除轮胎和驾驶室)连同底盘用带铰接的支撑钢板安装于T型槽平台上(图1),并使整车机构可以绕支点1和2旋转.采用电液伺服加载的方式,设计一套液压系统和控制系统,控制液压缸3以一定的方式加载于铲斗正面,液压缸4(图中未画出)加载于铲斗侧面,以模拟铲斗的水平和侧向受载.
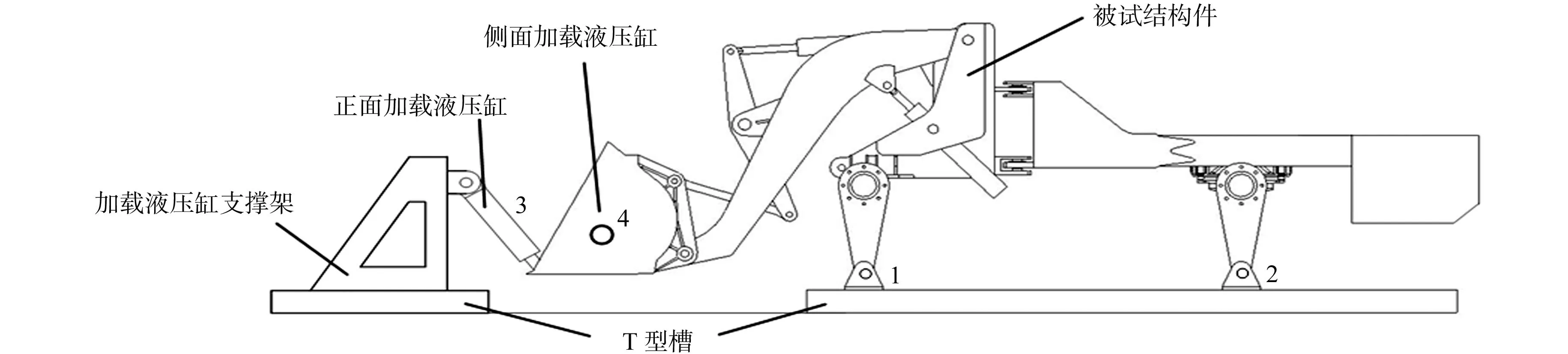
图1 疲劳试验台结构示意图Fig.1 Structure schematic diagram of fatigue testing machine
1.2 加载力分析
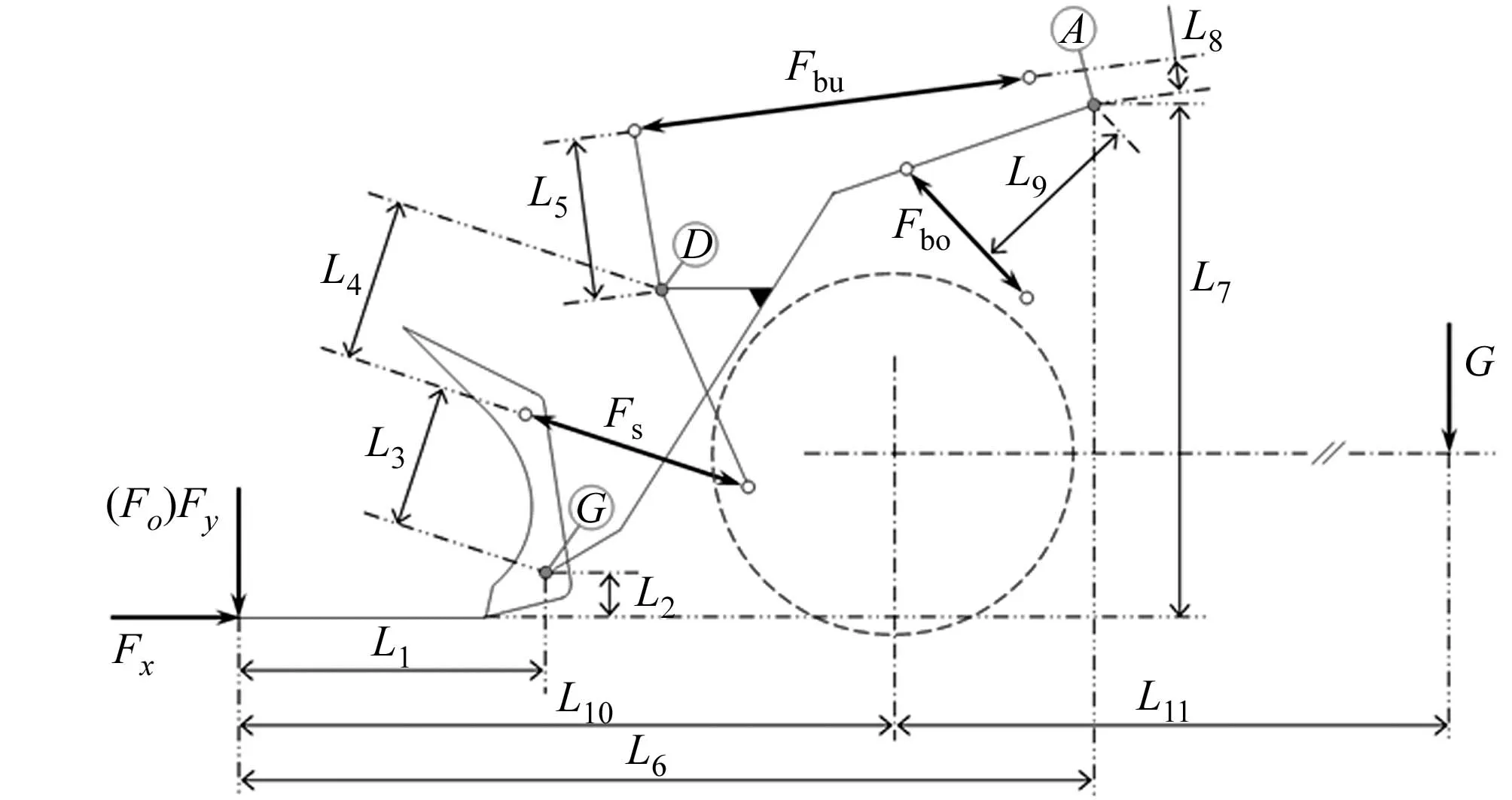
图2 ZL50装载机铲装工况的机构运动简图Fig.2 Kinematic sketch of mechanism of ZL50 loader in shovelling working condition
以某ZL50型装载机为例,其工作机构是由铲斗、动臂、摇臂、拉杆、机架、动臂液压缸缸套、动臂液压缸活塞杆、铲斗液压缸缸套和铲斗液压缸活塞杆等构件组成的空间机构,且左右对称,两侧铲斗液压缸、动臂液压缸、拉杆、摇臂液压缸的运动学、动力学特性完全一致,可简化为平面机构[7-8].
为确定加载力的大小和方向,绘制平面机构运动简图,如图2所示.图2中:Fs为拉杆的拉力,N;Fx为水平反作用阻力,N;Fy为垂直反作用阻力,N;Fbu为摇臂液压缸拉力,N;Fbo为动臂液压缸拉力,N;L1,L2,L3为Fs,Fx,Fy到G点的力臂;L4,L5为Fs,Fbu到D点的力臂;L6,L7,L8,L9为Fy,Fx,Fbu,Fbo到A点的力臂;G为装载机净质量,kg.
根据装载机动臂与铲斗在G点、D点、A点的力矩平衡,可得装载机垂直反作用阻力Fy,即
(1)
式(1)中:d为动臂液压缸通孔直径;P为动臂液压缸两腔压力差.
由式(1)可得装载机水平反作用阻力Fx与垂直反作用阻力Fy的关系式,即

(2)

表1 工作阻力计算参数
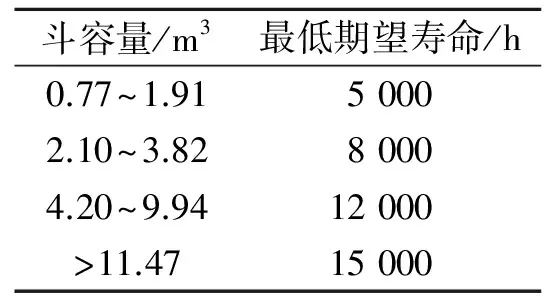
表2 装载机最低期待使用寿命
1.3 加载频次
参考国外装载机最低期望使用寿命数据[1],各斗容量装载机最低期望寿命如表2所示.以ZL50型轮式装载机为例,其斗容量为3 m3,其期望使用寿命为8 000 h,则疲劳寿命试验中载荷总加载次数N为
(3)
式(3)中:T为期望使用寿命,取8 000h;t为单个铲装循环用时,视作业形式不同通常在30~50s之间,取40s.统计数据表明,在实装作业中,平均每5次铲装循环发生1次偏载,其中,偏载同时承受侧载约占1/4[6].因此,正载情况加载57.6万次,偏载情况加载10.8万次,偏载同时承受侧载情况加载3.6万次.
2 液压系统的设计
疲劳试验机液压系统主要为加载试验提供动力,根据图1所示的结构和加载试验所需达到的性能,设计疲劳试验机液压系统,如图3所示.图3中:M1,M2为变频电机;M3,M4为电机;C1~C8为手动球阀;XJ1~XJ4为行程接近开关;YV1~YV11为电磁阀线圈.
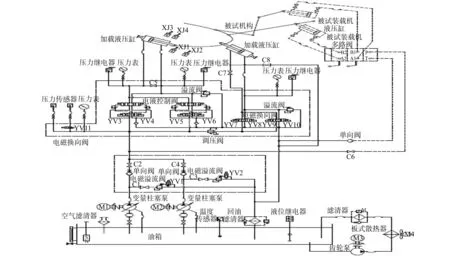
图3 疲劳试验机液压系统原理图Fig.3 Hydraulic system schematic diagram of fatigue testing machine
疲劳试验机液压系统的主要技术参数,如表3所示,可实现泵组空载启动、两级调压、手动流量调节、循环过滤、多点测压、失压监测等功能.为确保试验机实现24 h无人值守正常运转,对变量柱塞泵、电液控制阀、电磁换向阀及压力传感器都采用冗余设计,控制系统可根据传感器、继电器、行程接近开关的反馈数据判断系统工作状况,如检测到故障,可根据预设方案自动切换备用泵组和阀组工作.
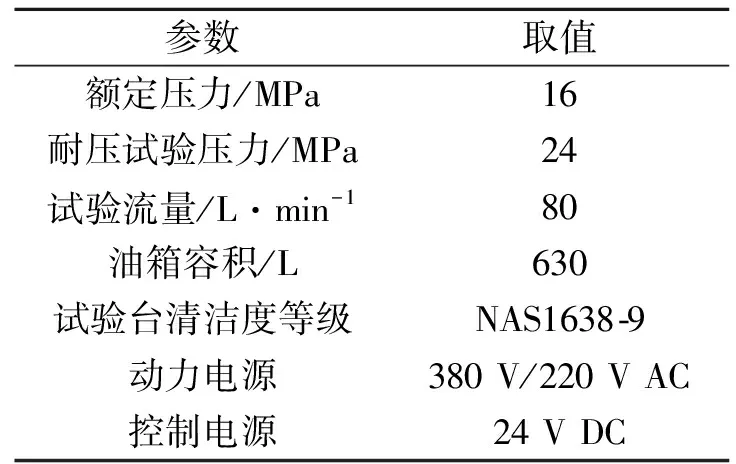
表3 液压系统主要技术参数
经设计计算,选定正面加载缸最大行程300 mm,内径160 mm,活塞杆直径90 mm;侧面加载缸最大行程200 mm,内径125 mm,活塞杆直径70 mm.加载泵采用A7V55型变量柱塞泵,公称排量55 mL·r-1.在额定压力16 MPa下,最大正面加载力可达321.5 kN,侧面加载力可达196.3 kN,通过调整系统压力、流量和泵的排量,可满足装载机各种结构件疲劳试验需要.
3 控制系统的设计
试验机控制系统主要用于实现按预定动作对被试结构件反复加载/卸载预定次数,同时监测试验过程中的各种信号,进行故障自动诊断及故障处理,保证系统安全运行及试验的顺利进行,可实现本地和远程独立调试和试验.本地控制采用 MCC控制柜实现,可完成本地/远程控制转换、液压泵启/停、加载/卸荷、急停、异常报警等,主要实现系统各设备的功能测试,为远程自动控制做准备.
远程控制采用触摸屏+PLC控制器的上下位机结构.触摸屏提供人机交互,完成试验参数设置、状态监测和显示、报警信息显示及操作指令下达等功能;PLC完成系统逻辑控制,实时采集液压系统状态参数、进行自动实验、故障诊断、故障处理及实验数据的记录.本地控制和远程控制均可通过对各电磁阀的控制独立进行系统调试和试验.根据要求,各工况下的电磁阀线圈通电规则,如表4所示.表4中:YV3/YV4和YV5/YV6,YV7/YV8和YV9/YV10形成互锁,同一时刻只有一个通电.在调试和试验过程中,均应遵循表4的规则.
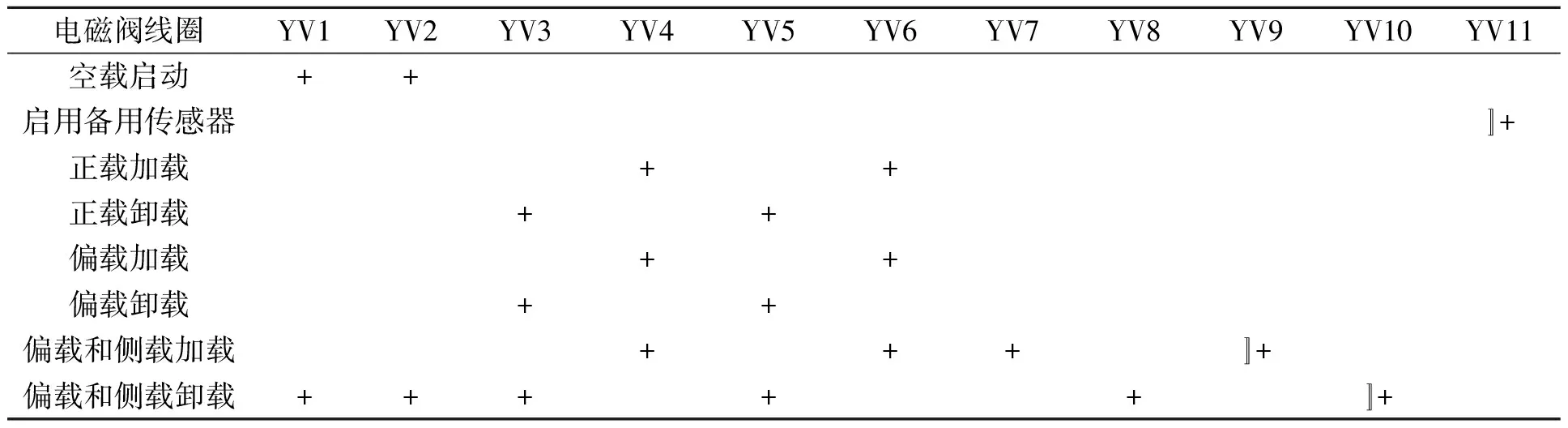
表4 各工况下线圈通电规则表

图4 远程操控台Fig.4 Long-distance manipulation platform
远程操纵台包括触摸屏、操作按钮、开关、指示灯等,工作界面如图4所示.采用西门子Smart1000型触摸屏,具有高分辨率宽屏显示、人机界面友好、经济实用、性价比高等特点[10],其开发工具为WinCC flexible.通过触摸屏设置试验参数后,可操作触摸屏上的虚拟开关,也可通过操纵台上的开关按钮进行试验.采用西门子S7-226CN型PLC控制器(含24路DI和16路DO,继电器输出),并扩展了8路数字量输出模块EM222CN(继电器型)和4路模拟量输入模块EM231CN.控制系统硬件结构,如图5所示.触摸屏HMI软件功能模块,如图6所示.

图5 控制系统硬件结构图 图6 触摸屏HMI功能模块图Fig.5 Hardware structural drawing of control system Fig.6 HMI function module chart for touch screen
触摸屏的初始工作界面(图4左侧),包括手动调试、自动实验和报警信息模块.手动调试模块,用于进行试验系统各元件的手动控制,以确定信号传递是否正常,元件能否正常工作,为进行自动实验做准备,如图7所示.自动实验模块用于进行自动加载试验,包括参数设置、实验过程、报警信息、故障恢复等4个子模块,如图8所示.
故障诊断与处理是系统的重要功能,是保证24 h无人值守自动实验的关键.故障信号的来源主要包括液位继电器LJ1~LJ2,电机热继电器FR1~FR3,压力继电器PJ1~PJ3,行程接触开关XJ1~XJ4等数字量信号和压力传感器、温度传感器等模拟量信号.故障诊断参数包括主备机组的选择、温度阀值、压力阀值和持续时间等.系统根据这些参数进行故障诊断,并进行机组切换或停机等相应处理.

图7 手动调试界面 图8 参数设置界面 Fig.7 Manual debug interface Fig.8 Parameter setting interface
4 加载试验

图9 加载疲劳试验Fig.9 Load fatigue test
为了验证该疲劳试验机的稳定性和可靠性,对某ZL50型轮式装载机车架-工作机构联合体进行加速疲劳寿命试验.根据加载力Ft的分析结果,偏载情况下液压系统正面加载压力调定为6.3 MPa,侧面加载压力调定为3.4 MPa,泵排量设为40 mL·r-1,取加速系数为5,则加载周期为8 s.若每天24 h连续等幅加载,完成72万次加载试验需历时66.7 d.鉴于本次试验的目的是为了验证系统的稳定性和可靠性,为了节省时间,只进行偏载、偏载加侧载的试验,按照每3次偏载进行1次偏载加侧载的方式循环加载,试验现场如图9所示.

(a) 裂纹1 (b) 裂纹2图10 前车架的疲劳裂纹Fig.10 Fatigue crack of front frame
前车架的疲劳裂纹,如图10所示.试验结果表明:偏载试验达到6万次,偏载加侧载达到2万次时,未发现前后车架、动臂等出现疲劳裂纹;继续加载到9万次和3万次后,发现前车架结构出现了两处裂纹,如图10圈中所示(为便于观察,使用了显影剂观测).图10中:裂纹1位于左侧前桥连接板加强肋板顶部焊接处,裂纹2位于左侧翼箱下支撑肋板前端面与内侧板焊接处,均处于应力集中位置.
继续加载至10万次和3.3万次时,动臂右外侧耳板焊缝与动臂横梁右下角焊缝出现裂纹;加载至12万次和4万次时,左侧动臂板发生严重断裂破坏,试验终止,共加载约16万次,试验过程稳定.根据上述试验结果和正载与偏载的发生概率,参考加速疲劳寿命试验循环加载次数与装载机使用寿命之间的关系,对被试结构件的疲劳寿命进行反推,可知被试装载机前车架的疲劳寿命为4 400~6 700 h,动臂的疲劳寿命为7 400~8 900 h.按照8 000 h期望使用寿命,可知该试验样机的前车架结构没有达到设计要求.
需要指出的是,鉴于条件限制,上述结论是以理论分析和计算数据为加载条件所得出,如能通过外场试验得到装载机各工况下的随机载荷谱,再编成加载谱输入到前述控制系统中,通过加载缸施加于试验样机,则得到的疲劳失效数据更为客观、可靠.
5 结束语
以装载机结构件为试验对象,根据装载机作业工况特点,应用电液伺服驱动技术设计结构件疲劳试验机.将机电液一体化技术相结合,采用上下位机的系统结构控制液压系统进行疲劳加载试验;利用传感器技术和自动检测技术,主动监测故障并自动切换备用泵组和阀组,可实现24 h无人值守试验.系统运转稳定,可靠性高,可在实验室环境下模拟装载机结构件在各工况下的随机受载,为装载机结构件的优化设计提供参考依据.
[1] 马相明,孙霞,张强.轮式装载机典型作业工况构建与分析[J].山东大学学报(工学版),2015,45(5):82-87.
[2] 钟丽萍.基于有限元分析的装载机铲斗结构优化[J].中国工程机械学报,2011,9(1):68-72.
[3] 杜宏宇,李济顺,杨芳,等.机械结构件疲劳监测方法及试验装置设计[J].矿山机械,2015(10):116-120.
[4] 朱牧之,赵升吨.动态疲劳试验机传动方式的合理性探讨[J].机床与液压,2013,41(13):164-167.
[5] 张英爽,王国强,王继新,等.轮式装载机半轴载荷谱编制及疲劳寿命预测[J].吉林大学学报(工学版),2011,41(6):1646-1651.
[6] 王继新,沈勇,胡季.基于虚拟零件轮式装载机前车架有限元分析[J].煤矿机械,2010,31(4):93-95.
[7] 蔡应强,陈清林,丁旭光.轮式装载机前车架的有限元分析与结构优化[J].华侨大学学报(自然科学版),2016,37(1):27-31.
[8] 蔡应强,丁旭光.基于虚拟样机的轮式装载机前车架动态载荷分析[J].集美大学学报(自然科学版),2015,20(6):450-456.
[9] 陈树勋,梁光明,李会勋.轮式装载机前车架结构载荷计算、有限元分析与优化设计[J].工程机械,2007,38(6):37-42.
[10] 胡俊飞,阮健,李胜,等.电液高频疲劳试验机的控制系统设计研究[J].浙江工业大学学报,2015,43(1):58-61.
(责任编辑: 黄晓楠 英文审校: 崔长彩)
Design of Fatigue Testing Machine for Structure Component of Loader
CAI Yingqiang1,2,3, XIAO Longhai1,2,3
(1. School of Marine Engineering, Jimei University, Xiamen 361021, China;2. College of Mechanical Engineering and Automation, Huaqiao University, Xiamen 361021, China;3. Fujian Provincial Key Laboratory of Naval Architecture and Ocean Engineering, Xiamen 361021, China)
In this work, electro-hydraulic servo technology and programmable logic controller (PLC) technology were used to design the special fatigue strength test system to find the stress weak region of loader structure components, optimize the structure designing, and improve the fatigue life,The system adopted the test scheme with front and side loading. The touch screen and PLC controller can remotely control the two servo hydraulic cylinder motion to simulate the load of structure components. The test system can run 24 hours unattended for a long time, and meet the requirements of different types of structure components of loaders. The results of experiment show that the fatigue testing machine can run stable and reliably. Keywords: fatigue testing machine; loader; structure component; electro-hydraulic servo; remote control
10.11830/ISSN.1000-5013.201702002
2016-09-21
蔡应强(1980-),男,讲师,博士,主要从事电气控制方面的研究.E-mail:cai0929@126.com.
福建省自然科学基金资助项目(2016J01248); 福建省教育厅科技项目(JAT160280); 福建省科技厅高校产学研项目(2014H6020)
TH 871.3
A
1000-5013(2017)02-0141-06
猜你喜欢
装备制造技术(2020年4期)2020-12-25 05:26:18
经济技术协作信息(2018年8期)2019-01-14 03:06:36
纤维复合材料(2018年4期)2018-04-28 08:45:46
制造技术与机床(2017年6期)2018-01-19 02:41:09
制造技术与机床(2017年7期)2018-01-19 02:29:57
制造技术与机床(2017年3期)2017-06-23 08:11:24
电子技术与软件工程(2016年20期)2016-12-21 10:11:10
电子技术与软件工程(2016年19期)2016-12-19 20:35:10
电子技术与软件工程(2016年19期)2016-12-19 18:35:03
电子技术与软件工程(2016年19期)2016-12-19 18:10:37
