
行车辅助预警服务平台研究与设计
2017-04-06 03:23蔡亮
赤峰学院学报·自然科学版 2017年5期
蔡亮
(兰州文理学院数字媒体学院,甘肃兰州730000)
行车辅助预警服务平台研究与设计
蔡亮
(兰州文理学院数字媒体学院,甘肃兰州730000)
面对城市复杂的交通环境,如何设计一个既不增加使用成本,又能提高普通民用车辆行驶安全性的行车辅助预警服务平台是本文研究的重点.该平台利用移动智能通信设备,在LBS服务基础上,采用B/S与C/S相结合的结构,不仅能够提供线路规划、信息推送等基础服务,同时能够通过图像采集,运用机器视觉相关技术为用户提供实时的前方行车环境预警提示,具有一定的实际应用价值.
行车预警;LBS;图像处理;目标跟踪
目前我国机动车保有量已达到2.79亿辆,当中私家车所占比例达到72%.这使得道路交通状况日益复杂,事故不断频发.为减少事故缓解交通压力,相关机构虽采用了一些防护技术,但提高了购车费用.而我国私家车价格普遍偏低,配置简化,三轮民用车甚至没有安全防护.因此如何提高行驶安全性又不增加成本,同时降低事故发生率呢?智能移动通信设备的使用为我们找到了解决办法.据统计预测,我国2018年手机保有量会达到12.2亿台.因此利用其构建一个能实时监控前方行车环境、提高驾驶人安全意识、减少事故发生、降低使用成本的行车辅助预警服务平台就显得日益重要.
1 安全防护技术现状
现有安全防护技术主要分三个方面:
(1)基本安全防护,是车辆出厂时的基本配置,如安全带、气囊、防撞梁、发动机下沉技术等.这些防护措施仅在交通事故发生时对车内人员安全起到一定保护作用,但无法提前预防,且不能预测交通状况.
(2)辅助驾驶系统,早期有ABS、稳定控制等,能提升行驶中车身安全性,但仅在事故发生时保护车内人员安全;后期有通过传感器感知的辅助系统,如全景摄像、自适应巡航、上坡辅助及并线辅助等[1],但这些系统需安装大量电子设备模块和PC模型,各模块间相互独立、集成度低、功能重复,同时增加了制造成本.
(3)无安全措施.目前还存在着大量三轮机动车、摩托车、电动电瓶车等,这些车辆一般无安全辅助系统,甚至没有安全防护措施,发生事故往往更严重.
因此需要一个符合我国交通状况,以驾驶人为服务主体,不受限于车辆类型并能对其前方行车环境预警的服务平台来弥补其他系统的不足.
2 技术分析
2.1 LBS技术
LBS即定位服务,是移动设备通过移动网络和其当前位置来获取附加信息的一组信息服务[2].该技术能有效降低成本、提高效益,同时能获取大量交通数据信息.LBS服务系统体系架构见图1:

图1 LBS服务系统体系架构图
2.2 机器视觉
2.2.1 图像处理
通过移动终端所采集的道路图像十分复杂,需快速去除其中干扰信息,处理技术主要有:
(1)彩色空间转化
所采集图像多为RGB格式,使用前须转化成CIELab.转化分两步,先由线性变换转化到XYZ,再转化到CIELab.取值范围L为[1,100],均为[-128,127].公式如下:
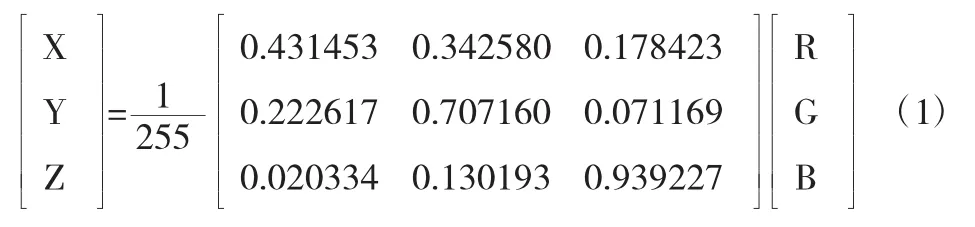
X0=95.04,Y0=100.00,Z0=108.255为标准参考白光,根据公式1带入RGB值后即得到相应CIELab值.
(2)图像灰度化、降噪及增强
灰度化处理时分量法图像偏深、最大值法图像偏浅、平均值法图像效果较差,而加权平均法通过权值修正后,效果更符合人类视觉灰度值[4].因此在其基础上结合彩色通道提取法能够增强图像效果,公式如下:

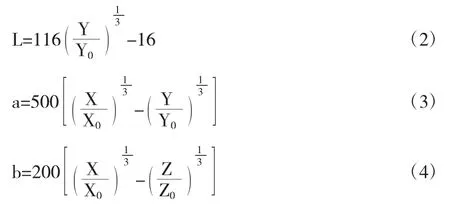
降噪方法有均值和中值滤波法,前者能使噪声得到衰减或消除,但也使图像模糊,其程度随所选领域半径变大逐渐加深,虽可用阈值控制,但阈值大小不易控制[5];因此采用后者,其公式为:f(x,y)=med{Sf(x,y)},Sf(x,y)为像素的领域.处理流程见图2:
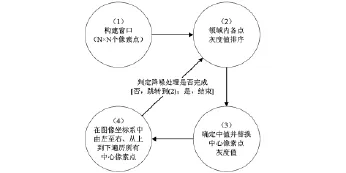
图2 中值滤波处理流程
增强方法有空间域和频域方法,通过增强对比度、增强边缘提高清晰度.增强对比度主要有基于直方图的锥形拉伸、均衡化、匹配等;边缘检测主要通过微分算子卷积完成,常见算子有Sobel、Roberts、Prewitt等.
2.2.2 运动目标检测与跟踪
检测主要分基于图像差分和基于光流场两种,前者又分为帧间差分和背景差分[6].背景差分需构建不含运动目标的基础图像,多用于固定监控设备;帧间差分动态环境自适应性强、检测目标快,应用范围广.跟踪方法有基于几何亮度特征、光流场、频域等.其中光流场对于有背景运动或运动镜头拍摄目标进行检测跟踪有很好效果.常见光流法有Horn&Schunck、Lucas&Kanade等.
3 系统设计
3.1 总体结构设计
行车辅助预警服务平台采用B/S与C/S结构相结合,主要由移动客户端服务、图像采集分析处理、后台服务管理及数据分类管理四大部分构成,见图3:

图3 行车辅助预警服务平台结构
3.2 功能模块分析
行车辅助预警服务平台除常见线路规划、信息推送等功能外,主要功能是为用户提供前方信号灯安全提醒、用户车辆行为安全提示及前方车辆行为预测提醒等安全服务.平台分为移动客户端服务和后台服务管理.
(1)移动客户端服务主要分为用户注册、路线导航、数据处理、语音播报提醒及信息推送等.数据处理模块主要实现数据上传下载,上传为移动客户端实时数据,包含位置、速度、采集的图像及视频等;下载包含信号灯指示提醒、行为预测结果、系统更新等信息.语音播报提醒主要实现将各种安全提示信息通过语音形式告知用户.信息推送主要实现周边餐饮及住宿预订、团购及广告发布等.

图4 移动客户端服务功能模块
(2)后台服务管理主要分为交通信息管理、业务管理及系统维护.交通信息管理主要对应移动客户端所上传数据的分类、处理、存储、查询以及相应的安全信息发布、管理,还能对用户上传交通事故情况向其他用户发布来提醒提前安排路线等.业务管理主要提供周边信息登记、发布,餐厅、酒店信息发布及订单处理,特惠团购、增值业务以及广告业务与发布.系统维护主要负责不同用户权限及数据维护等.

图5 后台服务管理模块
4 模块设计研究
4.1 路线规划功能
线路规划其主要功能是在电子定位地图的基础上,为用户提供车辆行驶路线规划功能.模块基于百度API地图SDK,通过GPS获取移动终端经纬度信息来定位或由用户给出出发点、目的地信息,来确定用户所需线路.在建立路线规划mSearch=RoutePlanSearch.newInstance()的同时,调用LocationClient类,使registerLocationListener()获得监听数据.由于事件监听器涵盖多个接口函数,而根据设计需要,选用onGetDrivingRouteResult(),即自驾路线.当选定目的地enN-ode后便可根据监听的位置和目的地进行线路规划.代码如下:

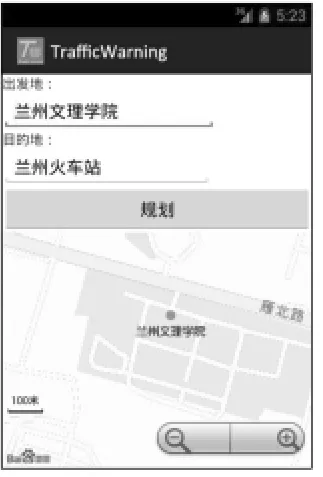
图6 线路规划功能设计图一

图7 线路规划功能设计图二
4.2 车辆行为跟踪功能
车辆行为跟踪主要功能是完成前方车辆运动检测,为用户提供车辆行为预警.模块功能基于MATLAB通过获取移动终端视频帧并将其转化为相应图片,调用vision.OpticalFlow()转化为灰度图以计算光流场,经幅值、阈值、分割后获得二值图,再运用形态学滤波、腐蚀、关闭对分割后图形进行处理,调用vision.BlobAnalysis()计算位置、面积.同时结合帧间差法,运用帧间特征与MeanShift算法相结合以提高检测效果、加强定位准确性,获取移动轨迹来判断其运动倾向.同时使用vision.ForegroundDetectord()对象,以弥补光流法缺陷.

图8 跟踪捕捉图一

图9 跟踪捕捉图二

图10 跟踪捕捉轨迹图
5 结语
行车辅助预警服务平台不仅能提供线路规划、信息推送等基础性服务,同时能提供实时前方行车环境预警提示,及时告知驾驶人避免事故发生.目前该平台部分功能已逐步完成,但仍有一些需进一步补充和完善,特别在复杂环境下稳定跟踪及车辆行为判定上,还有待更进一步提高,今后考虑引入尺度不变特征及模板匹配,结合图像数据挖掘技术,在所获取图像数据不断累积的情况下降低目标跟踪不稳定性,提高实时性、准确性及处理速度.相信该平台能提供更安全的行车环境,使用户能更便捷获取交通安全信息.
〔1〕张翔.2014年汽车ADAS技术的最新进展[J].汽车电器. 2014,(8):4-7.
〔2〕郭瑞亮.基于移动终端的位置服务(LBS)系统的研究与实现[D].哈尔滨:哈尔滨工程大学,2013.
〔3〕肖若荣.基于机器视觉的交通标志识别关键技术研究[D].长沙:中南大学,2013.
〔4〕林广宇.基于嵌入式技术的车载图像监控系统研究[D].西安:长安大学,2009.
〔5〕万洪林,彭玉华,郭锐.基于方向的自适应多级中值滤波[J].通信学报,2006(4):119-123.
〔6〕季鸣,王红茹,童伟.基于改进差分和光流的新型运动目标检测方法[J].计算机系统应用,2015(10):111-115.
〔7〕Ahn Byungtae,Han,Yudeog Kweon,et al.Real-time facial landmarks tracking using active shape model and LK optical flow.International conference on ubiquitous robots and ambient intelligence.2012,(1):541-543.
〔8〕Cruz-Mota,Javier,Bogdanova,Iva,etal.ScaleInvariant Feature Transform on the Sphere:Theory and Applications[J].International Journal of Computer Vision,2012,98 (2):217-241.
〔9〕江济良,屠大维,许超,陈勇.复杂光流场运动分析与特征提取[J].电子测量与仪器学报,2011(3):285-290.
〔10〕徐丽珍,何耀平,孙霖.基于智能手机的人行横道红绿灯自动识别[J].计算机工程与应用,2010(23):219-222.
〔11〕张铮.精通Matlab数字图像处理与识别[M].北京:人民邮电出版,2013.
〔12〕王江峰,陈天华.基于行为视觉的交通肇事现场检测模型仿真[J].计算机仿真,2015,(8):195-198.
TP311
:A
:1673-260X(2017)03-0031-03
2016-12-12
甘肃省自然科学基金项目资助(1508RJZA076)
猜你喜欢
加油站服务指南(2022年6期)2022-07-28
中国交通信息化(2020年11期)2021-01-14
湖北农机化(2020年4期)2020-07-24
今日农业(2019年12期)2019-08-13
通信电源技术(2018年3期)2018-06-26
现代园艺(2017年22期)2018-01-19
汽车与安全(2016年5期)2016-12-01
火控雷达技术(2016年3期)2016-02-06
汽车维修与保养(2015年12期)2015-04-18
现代企业(2015年4期)2015-02-28
