
火箭助推器翼伞回收动力学仿真分析
2017-04-05 08:35蒋万松
兵器装备工程学报 2017年3期
蒋万松,荣 伟
(北京空间机电研究所,北京100094)
【装备理论与装备技术】
火箭助推器翼伞回收动力学仿真分析
蒋万松,荣 伟
(北京空间机电研究所,北京100094)
以基于可控翼伞回收技术的火箭助推器-控制平台-翼伞多体飞行系统为研究对象,采用拉格朗日乘子法建立了两体8自由度和三体10自由度多体动力学仿真模型,考虑了翼伞的表观质量特性和火箭助推器的气动力影响。研究了不同吊挂方式和有效载荷外形气动力对系统滑翔和转弯性能的影响。研究成果可以为翼伞系统的工程设计与应用提供参考。
火箭助推器;翼伞;多体动力学;拉格朗日乘子法
近年来,随着我国空间技术的快速发展,火箭发射活动日益增加,尽管火箭助推器的落区避开了人口稠密地区,但火箭助推器残骸及废液等仍对一些村庄与小镇居民的生命和财产造成很大威胁,不但加大了人员疏散成本,降低了火箭的运载能力,还造成了不良的政治影响。因此近年来,火箭及其组件的可重复使用技术已成为领域内的研究热点。
翼伞不仅具有普通降落伞折叠包装方便、体积小和质量轻的优点,而且具有良好的滑翔性、操纵性和稳定性,能够使火箭助推器落点散布范围减小,在航空航天飞行器和分离体的精确定点回收方面有着很高的应用价值。
火箭助推器翼伞回收系统,如图1所示,主要由翼伞(包括伞衣、伞绳和吊带等)、操纵控制系统和系统集成结构(控制平台)组成,火箭助推器作为其有效载荷,控制系统设备布置在控制平台或火箭助推器上,翼伞系统在火箭发射时包装在火箭助推器的头锥部位。目前国内外尚无采用翼伞系统对火箭助推器回收的先例。
为实现火箭助推器的定点回收任务,要对翼伞系统的飞行轨迹进行规划和控制,前提是要对翼伞系统的动力学响应特性进行深入研究。然而,翼伞系统与传统航空飞行器不同,翼伞与有效载荷或控制平台之间存在明显相对运动,尤其是开伞、转弯机动或雀降机动过程中更加明显,因此要从多体系统动力学的角度对翼伞-载荷系统进行动力学建模和分析;另外,翼伞是一种超轻结构,在分析翼伞系统的运动特性时,需要考虑翼伞表观质量的影响[1-2];此外,火箭助推器外形比一般有效载荷大得多,其外形气动力对系统的影响尚无明确结论。本文进行了火箭助推器吊挂方式和有效载荷外形气动力对翼伞系统性能影响仿真分析。
目前用于翼伞系统多体动力学特性研究的仿真模型均将伞体和有效载荷分别看作两个独立的刚体,不同之处在于连接约束模型,归纳起来主要分为3类:
第一类是“两体+弹簧”,两体(控制平台简化到火箭助推器固定结构上)间通过弹簧相连,连接点的空间位置显式求解,弹簧参数设置依赖于设计和经验,增加了求解自由度且难于收敛;以Vishnyak[3],熊菁等[4-6]为代表。
第二类是“两体+约束方程”,两体间通过约束方程建立,保证了连接点空间位置的一致性,建模过程程式化,便于模型的扩展,但增加了求解自由度;以wolf[7],Pillasch[8],Wise[9],Stricker[10],Christiaan[11],陈建平[12-13]等为代表。
第三类采用“共铰点两体+扭簧”,两体间共用一个坐标系原点,相对姿态关系通过扭簧建立关系,其参数的设置依赖于实际系统和仿真经验,为最小解集系统。以Barrows[14],Prakash[15],Muller[16],Mooij[17],Gorman,Slegers和Costello[18-19]等为代表。
本研究采用扩展性好的拉格朗日乘子法(第二类模型)建立系统动力学方程,对两种吊挂方式(如图 1所示)和火箭助推器外形气动力对系统滑翔和转弯特性的影响进行研究。
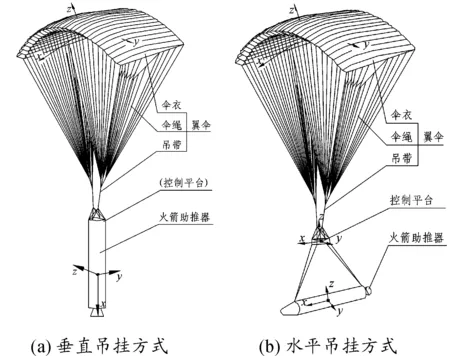
图1 火箭助推器翼伞系统回收过程示意图
1 翼伞系统动力学建模
本文主要研究对象是火箭助推器翼伞回收系统在开伞和充气张满到着陆过程的系统动力学行为,不研究流场作用机理,因此对一般可控翼伞-控制平台-载荷系统建立了两体(控制平台简化到火箭助推器固定结构上)8DOF(自由度)和三体10DOF动力学仿真模型,采用Barrows表观质量估算方法[1-2]进行翼伞表观质量计算。
1.1 基本假设
在建立系统动力学仿真模型时,对翼伞系统做了如下基本假设:
1) 飞行水平距离短,大地是水平的,忽略地球自转,且重力加速度恒定;
2) 翼伞完成充气张满后几何形状不变,左右对称,后缘操纵只影响气动力;
3) 翼伞、控制平台和火箭助推器均看作6DOF刚体,两体间通过刚性吊带连接约束;
4) 控制平台和火箭助推器的质量特性恒定不变,但翼伞含有表观质量,且随大气密度变化;
5) 火箭助推器的气动力模型简化为圆柱体,忽略控制平台的气动力影响;
6) 忽略翼伞操纵过程的系统响应延迟。
1.2 坐标系定义
1) 坐标系
惯性坐标系:固定于地球表面的东-北-天坐标系,坐标原点在着陆目标点地面位置,x轴指向当地东向,y轴指向当地北向,z轴由右手定则确定;
翼伞坐标系:固定翼伞上的本体坐标系,坐标原点位于翼伞的等效平均气动弦1/4处(c/4),x轴在翼伞纵向对称面内与平均气动弦线平行并指向开口方向,z轴在翼伞纵向对称面上与x轴正交并指向上表面,y轴由右手定则确定,如图1所示;
控制平台坐标系:固定在有效载荷平台上的本体坐标系,坐标原点位于有效载荷平台的质心位置,x轴与稳定飞行前方一致,z轴与x轴垂直并指向上方,y轴由右手定则确定;
有效载荷坐标系:固定在火箭助推器上的本体坐标系,坐标原点位于火箭助推器的质心位置,x轴指向尾喷口或头锥,z轴与x轴垂直并处于迎风区或吊点一侧,y轴由右手定则确定,如图1所示;
翼伞气流坐标系:固定在翼伞上的本体坐标系,坐标原点位于翼伞等效c/4处,x轴指向气流的来流方向,z轴在翼伞的纵向对称面内且与x轴垂直,y轴由右手定则确定。
2) 坐标系间关系
从气流坐标系到翼伞坐标系采用z-y-x转序的攻角α和侧滑角β描述,转换矩阵为Cba=Cy(-α)Cz(β)。
1.3 系统动力学方程
翼伞系统中,翼伞、控制平台和火箭助推器均看作6DOF刚体,对于垂直吊挂的两体(控制平台简化到火箭助推器上)系统模型,系统完整约束的多体系统动力学方程形式为
(1)
其中:T为系统动能;q为广义坐标;λ为拉格朗日乘子;Q为广义力。为求得方程(1)左侧的前两项,取惯性系下广义坐标和广义速度
(2)
其中:q为12×1列阵,不能直接积分;下标P表示翼伞;C表示控制平台或有效载荷。从本体系到惯性系的坐标转换矩阵为S,有
(3)
系统的动能T可表示为
(4)
其中,I为惯量矩阵,H为惯量交叉矩阵。对于一般物体,质量矩阵M=mE=STMS,但翼伞的质量和惯量是其真实物理质量惯量及表观质量惯量两项之和,且翼伞具有多个质心,此性质不再成立。于是根据方程(1)得到
(5)
翼伞系统多体间的约束模型是一个复合约束副,如图 2所示。
1) 翼伞-控制平台的连接特征线A0B0与B1B2(平行于控制平台y轴)正交,即约束f1
(6)
其中,ε=(-sinθr,0,-cosθr)T,θr为翼伞安装角。
2) 翼伞-有效载荷(控制平台)连接特征线A0B0的A0点总是在翼伞纵向对称面内,但沿A0B0线可移动,即f2和f3分别为
(7)
(8)
3) 翼伞-有效载荷间沿A0B0线移动受单个吊带长度约束,假设其不发生变化,即f4表示为
(9)
其中,rA1和rB1分别为连接吊索两端点在翼伞和有效载荷本体坐标系下的向量。
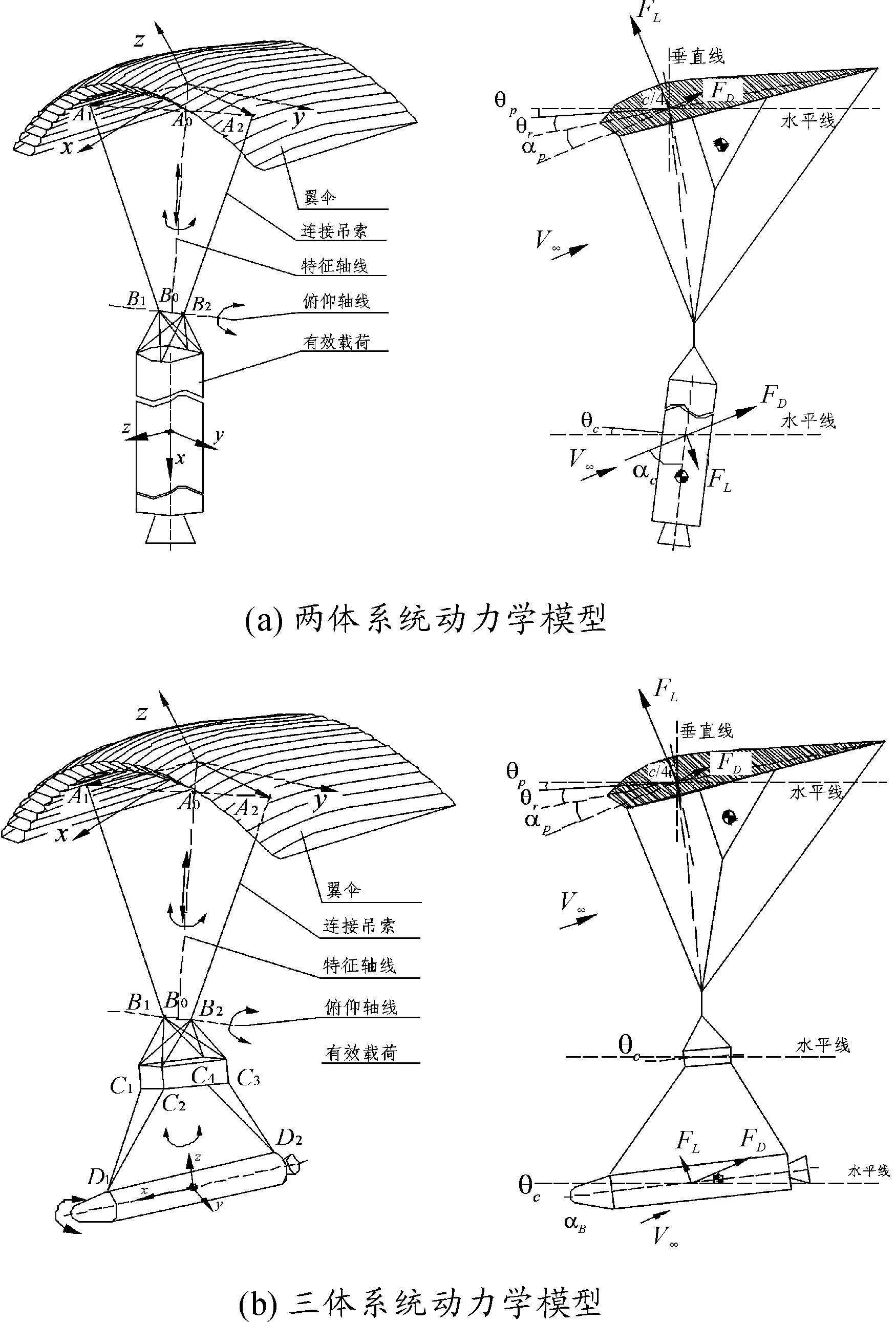
图2 翼伞系统连接与约束
对于三体系统,控制平台与有效载荷间约束与式(8)和式(9)同,可直接写出结果:
(12)
(13)
(14)
(15)
为得到方程(1)第3项,并直接求解出拉格朗日乘子,对约束方程求导
(16)



R2=(Se2)T(ωC×vC)+2(STvC-vp)T(ωp×e2)- (xC-xp)TSp(ωp×(e2×ωp))-e2(ωp×vp)+ ((ωC×rB0)T×Se2)TωC+(rB0×S(ωp×e2))TωC- (e2×ST(ωC×rB0))Tωp+((ωp×e2)×STrB0)Tωp
R3=(Se3)T(ωC×vC)+2(STvC-vp)T(ωp×e3)- (xC-xp)TSp(ωp×(e3×ωp))-e3(ωp×vp)+ ((ωC×rB0)T×Se3)TωC+(rB0×S(ωp×e3))TωC- (e3×ST(ωC×rB0))Tωp+((ωp×e3)×STrB0)Tωp

对于三体系统,相应的3个余项与R3和R4类似,不再赘述。
两体系统的动力学方程可以表示为
(19)

(20)
从而最终得到的系统动力学方程为
(21)
以上方程可通过数值积分方法进行求解。
1.4 表观质量估算
本研究所述翼伞沿展向展开后为矩形的圆弧形翼伞,采用Barrows给出的翼伞的表观惯量矩阵的估算方法[1],如下式所示,计算时加到方程(19)中与翼伞相关质量项中。
(22)

1.5 气动模型
翼伞气动力计算采用经典飞行力学方法,计算式及相关气动系数如表 1所示。升阻力气动系数参考了lingard[20]文献,静导数系数和横向气动参数参考了Prakash[15]和Iacomini[21]文献,瞬时飞行状态大气密度(GJB 365.1—1987)和气动参数均通过样条插值计算。
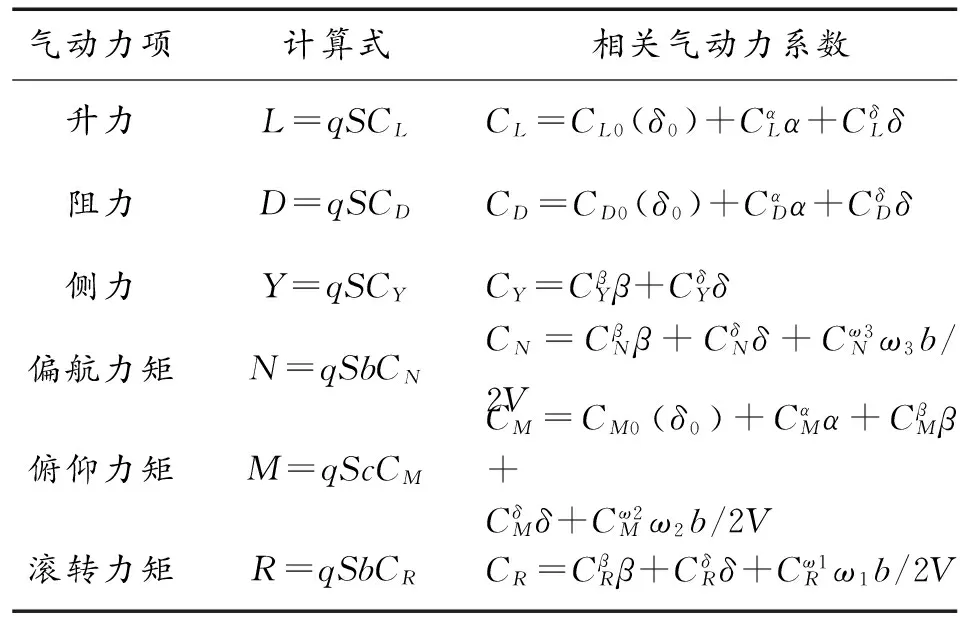
表1 翼伞气动力模型
注:δ为翼伞后缘控制量,ω为本体角速度,V为速度模值,b为展长。
在考虑有效载荷气动力时,将火箭助推器简化为圆柱体扰流模型,不考虑两端圆形端面的气动力,圆柱面受到气动阻力和气动升力作用,如图 2所示,采用经典飞行力学计算方法,主要与来流总攻角有关,阻力系数和升力系数如图3所示[22]。
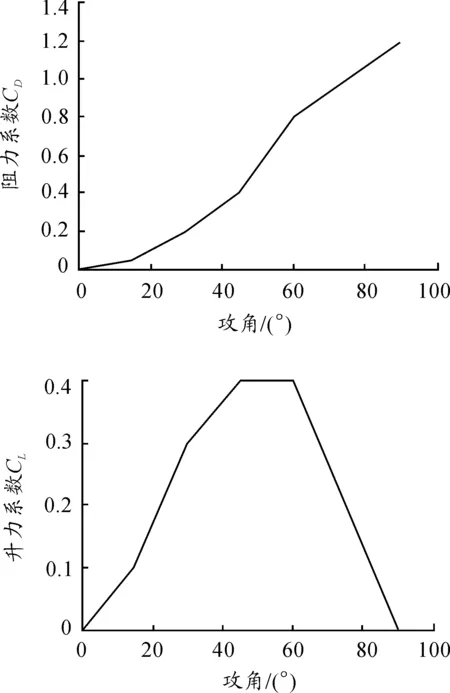
图3 圆柱体阻力系数和升力系数
2 动力学仿真研究
2.1 仿真条件说明
翼型Clark-Y,弦长c=5.55 m,翼展b=14.4 m,厚度e=0.15,系统长度R=11.5 m,安装角θr=6°(不含剖面4°),翼伞质量为35 kg;助推器模型长5.6 m,直径0.9 m,质量为800 kg,重心距喷口1.8 m;航向定义为东偏北为正,角度范围为(-180°,180°)。
2.2 垂直吊挂方式仿真分析
本节采用了两体8DOF仿真模型。图4给出了载荷气动力对滑翔运动影响的仿真分析结果。图5给出了载荷气动力对转弯运动影响的仿真分析结果,翼伞在40s时左侧施加60%的单边转弯操纵。分析得到以下基本结论:
1) 从图4(a)、图4(b)和图5(a)和图5(c)看出,载荷外形的气动力使系统水平速度微弱减小,而下降速度增大,从而滑翔性能降低。图4中滑翔比降低约10%左右;
2) 从图4(d)、图4(c)和图5(d)看出,载荷气动力会导致滑翔和转弯时的翼伞配平攻角微弱减小,对转弯时的侧滑角影响很小;
3) 从图4(e)、图4(f)和图5(f)、图5(g)看出,载荷气动力会导致翼伞和有效载荷俯仰角增大,而翼伞相对于有效载荷的俯仰角变化不大,相当于增大了翼伞的安装角;
4) 从图5(f)看出,在转弯运动过程中,载荷气动力会引起有效载荷俯仰角和偏航角振荡,而对滚转角影响很小。
2.3 水平吊挂方式仿真分析
本节采用了三体10DOF仿真模型。图6给出了有效载荷气动力对滑翔运动影响的仿真分析结果。图 7给出了有效载荷气动力对转弯运动影响的仿真分析结果,在40 s时左侧施加60%控制量。分析得到以下结论:
1) 从图6(a)、图6(b)、图7(a)~图7(c)可以看出,有效载荷外形的气动力对系统的水平速度、下降速度、转弯半径、滑翔比和转弯半径等影响很小;
2) 从图6(c)、图7(d)看出,有效载荷气动力使对翼伞配平攻角微弱减小,对侧滑角影响很小;
3) 从图6(d)~图6(f)和图7(e)~图7(g)看出,有效载荷气动力会引起其与控制平台的俯仰角微弱增大,发生小角度振荡,同时引起翼伞俯仰角小幅增大,而翼伞相对平台俯仰角变化很小;
4) 从图6(e)看出,在转弯运动过程中,载荷气动力会引起有效载荷、控制平台和翼伞发生相对运动,偏航振荡显著,对滚动角影响很小,对导航测量与控制会产生不利影响。
图4 载荷气动力对滑翔性能影响
图5 载荷气动力对转弯性能影响
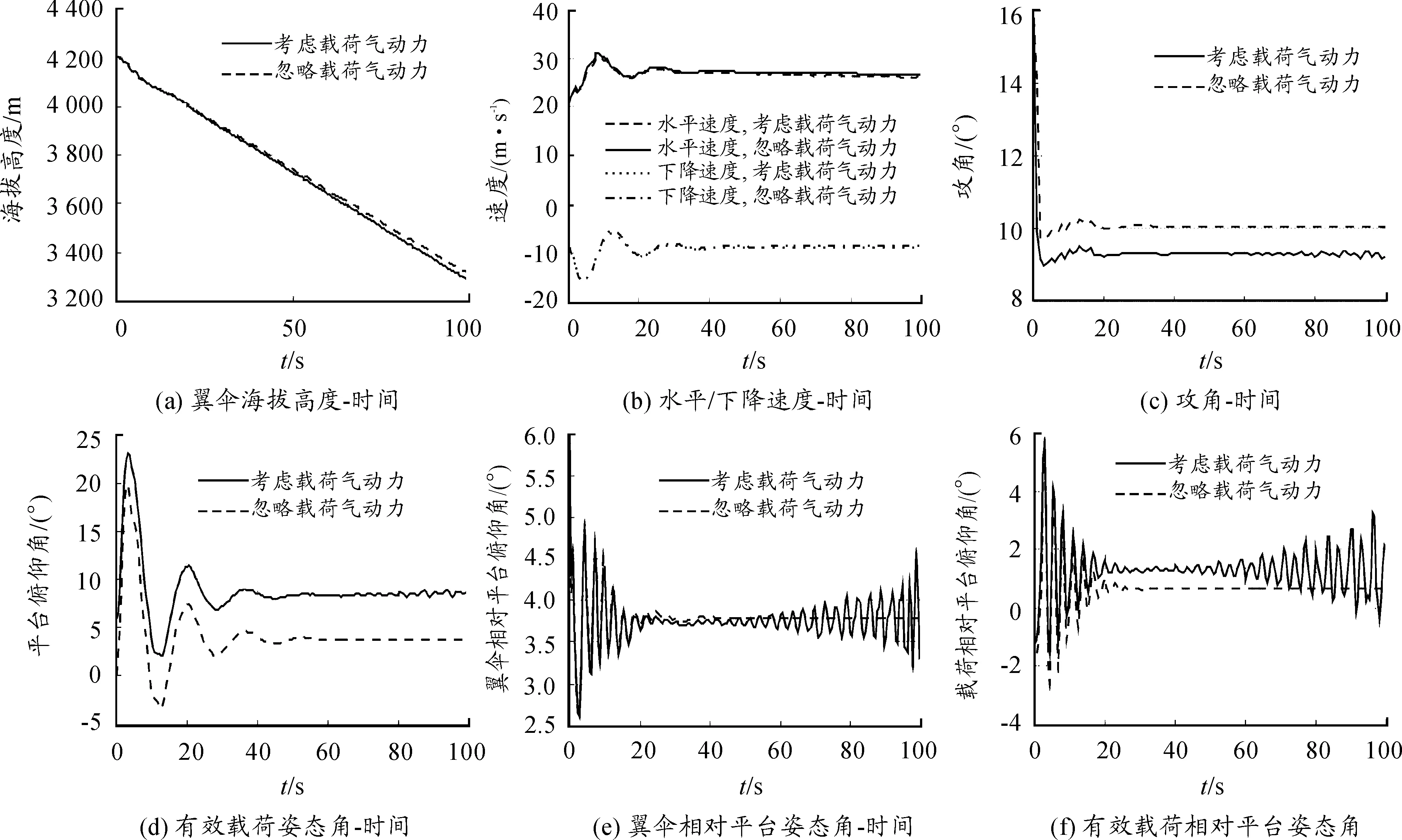
图6 载荷气动力对滑翔运动参数的影响
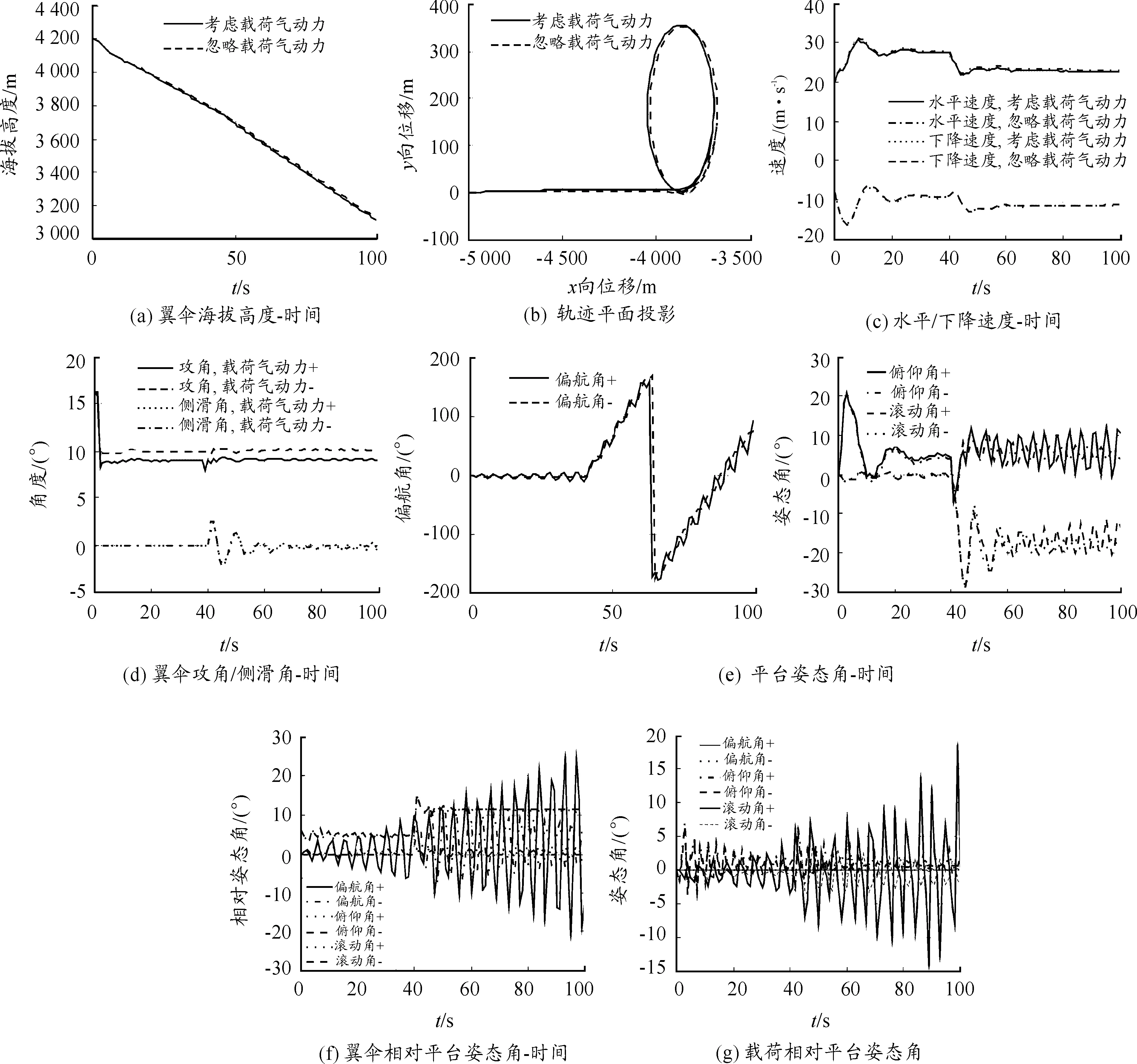
图7 载荷气动力对转弯运动的影响
3 结束语
本文以火箭助推器翼伞回收完成充气张满后的多物体飞行动力学系统为研究对象,将翼伞简化为刚体模型,连接吊带简化为刚性连接杆,采用拉格朗日乘子法建立了两体8DOF和三体10DOF动力学仿真模型,并考虑了翼伞的表观质量特性。对垂直吊挂方式和水平吊挂方式中火箭助推器外形气动力对飞行性能进行了仿真分析。
火箭助推器外形气动力对滑翔和转弯性能的影响分析表明,有效载荷火箭助推器外形会使翼伞和控制平台的滑翔攻角小幅增大,对水平速度、下降速度、转弯半径等影响较小,滑翔比有所降低,对翼伞配平攻角与侧滑角角影响很小,但会增大翼伞和有效载荷的俯仰角,相当于增大了翼伞安装角,对有效载荷姿态影响则非常有限。因此如果不考虑载荷的可重复使用和无损回收,只要不发生失速,可采用垂直吊挂的方式,系统滑翔比降低约10%量级。水平吊挂方式中,有效载荷气动力容易引起有效载荷、控制平台和翼伞间相对运动,且偏航振荡显著,对导航测量与控制产生不利影响。
[1] BARROWS T M.Apparent Mass of Parafoils with Spanwise Camber[R].AIAA 2001.2006.
[2] LISSAMAN B S,BROWN G J.Apparent mass effects on parafoil dynamics[R].AIAA 93. 1236.
[3] VISHNYAK A.Simulation of the payload.parachute.wing system flight dynamics[R].AIAA. 93.1250.
[4] 熊菁.翼伞系统动力学与归航方案研究[D].长沙:国防科技大学,2005.
[5] 熊菁,宋旭民,秦子增.翼伞系统两体相对运动分析[J].航天返回与遥感,2004,25(2):10.16.
[6] ERLIN Z,QINGLIN S,PANLONG T,et al.Modeling of Powered Parafoil based on Kirchhoff Motion Equation[J].Nonlinear Dyn,2015,79:617.629.
[7] YAKIMENKO O A.On the Development of a Scalable 8.DoF Model for a Generic Parafoil. Payload Delivery System[R].AIAA 2005.1665.
[8] PILLASCH D,SHEN Y,VALERO N.Parachute/submunition system coupled dynamics[C]//Aerodynamic Decelerator and Balloon Technology Conference.2013.
[9] WISE K A.Dynamics of a UAV With Parafoil Under Powered Flight[R].AIAA 2006.6795.
[10]STRICKER G,WITTE L.Analysis of the relative motion in a parafoil.load system[R].AIAA 2001.2013,2001.
[11]CHRISTIAAN R.A flight simulation algorithm for a parafoil suspending an air vehicle[J].Journal of guidance,control and dynamics,2007,30(3):791.803.
[12]陈建平,宁雷鸣,张红英,等.基于多体动力学的大型翼伞系统飞行仿真分析[J].飞行力学,2015,33(6):486.490.
[13]陈建平,张红英,童明波,等.翼伞系统纵向飞行性能仿真[J].中国空间科学技术,2015,35(2):25.32.
[14]BARROWS T M.Multibody Parafoil Model[C]//AIAA 2009.2945.1:8,2009.
[15]PRAKASH O,ANANTHKRISHNAN N.Modeling and Simulation of 9.DOF Parafoil.Payload System Flight Dynamics[C]//AIAA 2006.6130.1:26,2006.
[16]MULLER S,WAGNER O,SACHS G.A High.Fidelity Nonlinear Multibody Simulation Model for Parafoil System[C]//AIAA 2003.2120.1:10,2003.
[17]MOOIJ E,WIJNANDS Q G.9 DOF parafoil/ payload simulator development and validation[C]//AIAA.2003.5459.1:6,2003.
[18]GORMAN C M,SLEGERS N J.Comparison and Analysis of Multi. body Parafoil Models With Varying Degrees of Freedom[C]//AIAA 2011.2615.1:26,2011.
[19]SLEGERS N,COSTELLO M.Aspects of Control for a Parafoil and Payload System[C]//AIAA 2004.4822.898:904,2004.
[20]LINGARD J S.Ram airparachute design[C]//13thAIAA.14:45,1995.
[21]IACOMINI C S,CERIMELE C J.Lateral.directional aerodynamics from a large scale parafoil test program[R].AIAA 99.1731.
[22]夏雪湔,邓学蓥.工程分离流动力学[M].北京:航空航天大学出版社,1991.
(责任编辑 周江川)
Dynamical Simulation Analysis for Booster Recovery with Parafoil System
JIANG Wan-Song, RONG Wei
(Beijing Institute of Space Mechanics and Electricity, Beijing 100094, China)
Objected to a multibody dynamic system of booster-controller-parafoil based on parafiol recovery technology, a two-body simulation model of 8-degree-of-freedom and a similar three-body one of 10-degree-of-freedom were established with Lagrange multiplier method, apparent mass of parafoil and aerodynamic of booster considered. The effects on the performance of gliding and turning of suspension and aerodynamic of booster were studied and the results could be referred to parafoil system engineering.
booster; parafoil; multibody dynamics; Lagrange multiplier method
2016-10-21;
2016-11-26 作者简介:蒋万松(1981—),男,硕士,高级工程师,主要从事航天器返回着陆技术、动力学与控制研究。
10.11809/scbgxb2017.03.002
蒋万松,荣伟.火箭助推器翼伞回收动力学仿真分析[J].兵器装备工程学报,2017(3):6-13.
format:JIANG Wan-Song, RONG Wei.Dynamical Simulation Analysis for Booster Recovery with Parafoil System[J].Journal of Ordnance Equipment Engineering,2017(3):6-13.
V445.2;TJ7
A
2096-2304(2017)03-0006-08
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
军事文摘(2021年16期)2021-11-05
科技视界(2021年7期)2021-04-13
军民两用技术与产品(2021年12期)2021-03-09
北京航空航天大学学报(2020年3期)2021-01-14
航空学报(2020年9期)2020-12-01
航天工业管理(2020年3期)2020-07-25
太空探索(2020年5期)2020-05-19
北京航空航天大学学报(2017年11期)2017-04-23
