
混合励磁无刷爪极发电机的动态响应仿真
2017-04-01 06:29:32李家鹏朱常青沈一鸣
微特电机 2017年2期
李家鹏,朱常青,沈一鸣
(山东大学,济南 250061)
混合励磁无刷爪极发电机的动态响应仿真
李家鹏,朱常青,沈一鸣
(山东大学,济南 250061)
混合励磁无刷爪极发电机具有非线性、多耦合的特征,基于单神经元自适应PID控制方法,在MATLAB/Simulink中建立了它的动态响应仿真模型。该模型基于有监督的Hebb学习规则,通过在线动态调整加权系数,达到了在线控制的目的,不仅结构相对简单,而且具有较高的控制精度和鲁棒性,能应对复杂环境参数的变化。动态响应仿真结果表明,随着转速的变化,系统能自动调整励磁电流,使得发电机输出电压保持在稳定的水平,动态特性好。
混合励磁;爪极发电机;单神经元;PID;动态响应
0 引 言
爪极发电机结构相对简单、便于加工制造、成本低廉,在汽车工业领域应用广泛。混合励磁无刷爪极发电机的励磁方式为永磁励磁和电励磁相结合的方式,因此它既具有传统电励磁爪极发电机的优点,也具有永磁爪极发电机的优点。混合励磁无刷爪极发电机解决了永磁爪极发电机磁通不易调节的缺点,通过调节励磁电流,可以实现当发电机在转速及负载在一定范围内变化时,使得输出电压保持相对稳定的技术要求[1-3]。当发电机的转速或负载变化时,输出电压会产生相应的波动,如何快速有效的使输出电压保持稳定对发电机系统是非常重要的,本文通过单神经元自适应PID励磁控制系统对发电机动态响应特性进行分析,结果表明该系统响应速度快,鲁棒性好。
1 基本结构和数学模型
1.1 基本结构
本文所研究的新型混合励磁无刷爪极发电机是并联结构的,其中发电机的2个爪极是焊接在一起的,一个爪极跟轴直接相连,另一个爪极的极掌结构上有较大的内孔,励磁绕组和励磁支架伸入爪极里面,固定在端盖上的励磁支架上面有励磁绕组。爪极结构之间的间隙数和极数的数量是相等的,其中一半的间隙用来焊接爪极,另一半的间隙用来放置永磁体。本文所介绍的爪极发电机的基本结构如图1所示。这样的结构设计既结合了电励磁无刷爪极发电机的优点,也结合了并联式混合励磁有刷爪极发电机的优点,可以通过调节励磁电流的方式来改变气隙磁密;相对于纯粹的电励磁无刷爪极发电机,
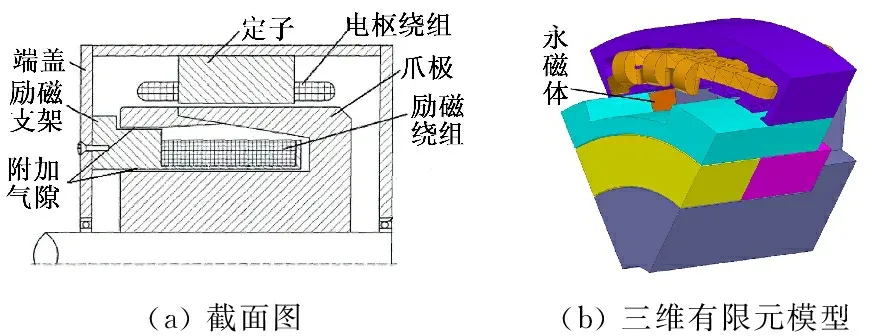
(a)截面图(b)三维有限元模型
图1 混合励磁无刷爪极发电机的结构图
励磁损耗降低,电机的功率密度得到了提高;并且励磁绕组是静止的,便可以去掉电刷和滑环,进而实现了励磁的无刷化,使爪极发电机的可靠性大大提高[4-6]。
1.2 数学模型
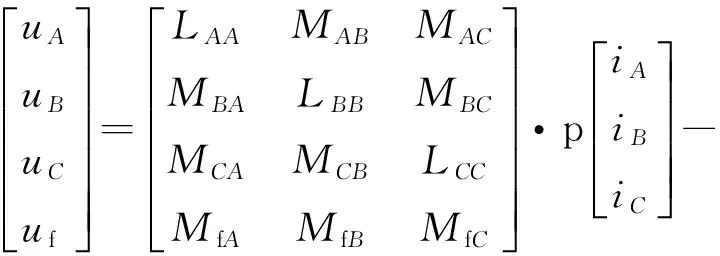
在规定正方向的前提下,混合励磁无刷爪极发电机的定子三相绕组和励磁绕组的磁链方程可以表示:
(1)
式中:IA,IB,IC为定子A,B,C相绕组的电流;If为励磁电流;ΨA,ΨB,ΨC分别为定子A,B,C相绕组的磁链;Ψf为励磁绕组的磁链;LAA,LBB,LCC表示定子绕组的自感;Lff为励磁绕组的自感;MAB,MBA,MBC,MCB,MCA,MAC表示定子绕组间的互感;MAf,MBf,MCf分别为定子三相绕组与励磁绕组间的互感;ΨAPM,ΨBPM,ΨCPM为永磁体在定子A,B,C相绕组中产生的磁链;ΨfPM为永磁体在励磁绕组中产生的磁链。
根据电磁感应定律和基尔霍夫第二定律,按照前面所规定的正方向,可列出混合励磁无刷爪极发电机定子三相绕组和励磁绕组的电压方程:
(2)
式中:uA,uB,uC为定子A,B,C相绕组的端电压;uf为励磁绕组所加的电压;RA,RB,RC为定子A,B,C相绕组的电阻;Rf为励磁绕组的电阻。
对新型混合励磁发电机作出如下假设条件:忽略定子、转子表面齿、槽影响;在空间上磁通密度和气隙磁动势均呈正弦分布;各相绕组均为对称绕组。当发电机定子绕组的连接方式为Y形连接,经过推导最终可以得到发电机的状态方程为:
(3)
式中:eA,eB,eC为永磁体和励磁电流共同在定子三相绕组中产生的感应电动势;ef为永磁体在励磁绕组产生的感应电动势;p为微分算子。
2 单神经元自适应PID控制
常规的PID控制应用广泛,其具有结构相对简单、较高的可靠性、在工程实践中易于实现等优点。在控制系统结构参数变化范围不大的情况下,PID控制取得的效果较好,但当被控对象的参数具有高度非线性和不确定性时,常规的PID控制并不能取得理想的控制效果。对于混合励磁无刷爪极发电机,各绕组电感是高度非线性和多耦合的,其A相自感通过有限元计算获得,如图2所示,可以看到A相自感是非线性且波动范围较大,所以仅靠常规PID调节效果并不理想。
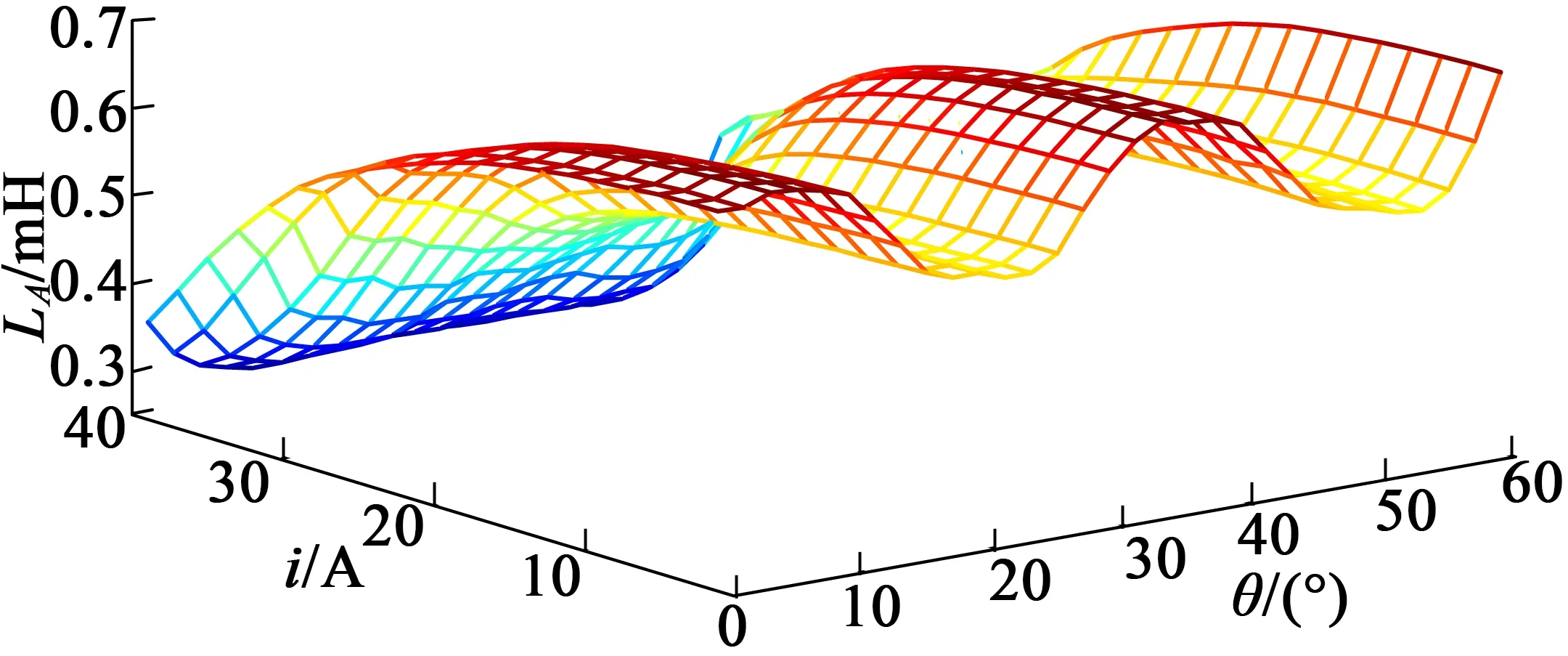
图2 A相绕组自感
神经元是神经网络的基本单位,通过连接权系数的调整,其便具有了自学习、自适应的功能。相比较大规模的神经网络,单神经元的结构相对简单,但能够很好地处理一部分非线性和复杂控制系统的问题。将常规的PID控制和相对简单的单神经元优势互补,两者共同组成单神经元PID控制器。普通PID控制器不方便在线实时调整系统参数,对复杂时变系统控制困难,新组合而成的单神经元PID控制器能在一定程度上弥补这一不足[7-8]。图3是单神经元自适应PID控制器的结构框图。
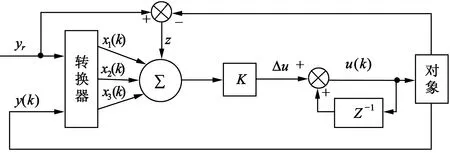
图3 单神经元控制器的结构框图
图3中y为控制器输入的反馈值,yr是控制器输入的参考值,x1(k),x2(k),x3(k)为转换器输出的3个状态量,其分别表示:


(5)

(6)
式(4)~式(6)中,wi(k)为对应于xi(k)的加权系数;Z为性能指标,其与x1(k)相等;u(k-1)为前一时刻控制器的输出作用率;K为神经元的比例系数,其一般是一个大于0的数。
为了更加高效地调整连接权系数,本文仿真采用的是有监督的Hebb学习规则,其加权系数学习规则:
wi(k+1)=wi(k)+ηie(k)u(k)xi(k)
(7)
式中:η为比例、积分、微分的学习速率,是一个大于0的数。为了保证收敛性和鲁棒性,对单神经元控制学习算法进行规范化处理后可以得到:
(8)
3 动态响应模型的建立与仿真
3.1 动态响应仿真模型
通过以上分析,在MATLAB中建立动态响应的模型,模型结构图如图4所示。混合励磁无刷爪极发电机的输出电压与给定电压进行比较的差值经过转换器,转换为单神经元自适应PID控制器的3个输入信号,按照控制器的输出信号,PWM控制器调节发电机励磁电流的大小,进而使发电机的输出电压保持稳定。

图4 动态响应模型结构图
混合励磁无刷爪极发电机的动态响应模型如图5所示,其中的混合励磁爪极发电机本体是根据前文所推导的数学模型搭建而成。考虑到在Simulink中单独搭建单神经元自适应PID模块的复杂性,在本模型中该模块采用s函数编写,用于动态在线调整神经元网络的加权系数。
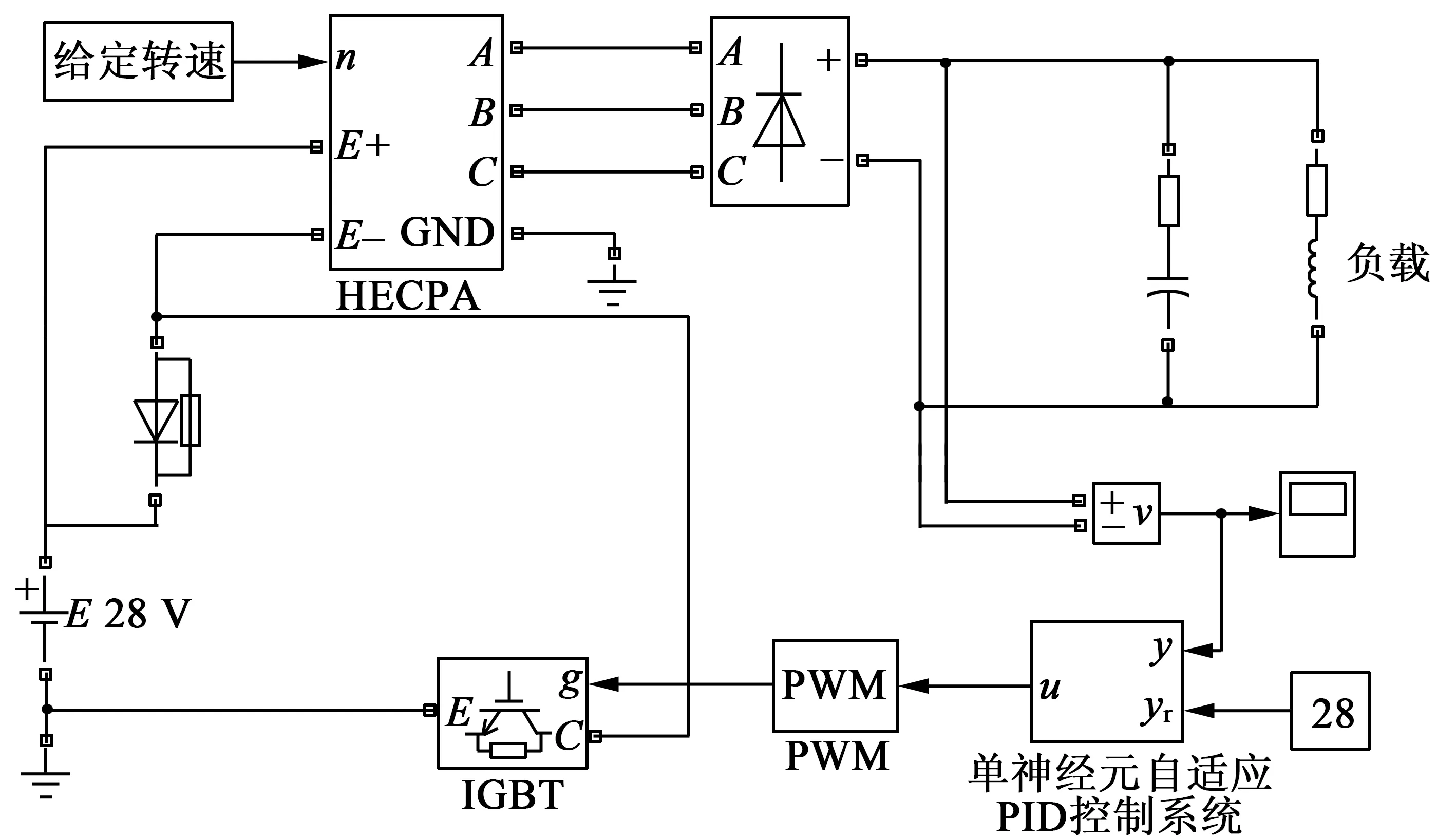
图5 混合励磁无刷爪极发电机动态响应模型图
3.2 仿真结果
根据以上所建立的仿真模型,对一台12 kW,28 V的混合励磁无刷爪极发电机进行了动态响应的仿真。仿真所用的电阻和电感参数均通过有限元分析得出。为了更好地说明所采用的单神经元自适应PID系统的性能,本文同时引入了传统的PID控制仿真进行比较。图6是发电机的转速变化曲线,图7是励磁电流的变化波形,相同仿真条件下两种控制系统的发电机输出电压波形如图8所示。由仿真结果可以看出,随着发电机给定转速的变化,单神经元自适应PID控制模块能够动态调整励磁电流的大小,从而使发电机的输出电压保持稳定;与传统的PID控制系统相比,单神经元自适应PID控制系统的超调量较小,调节时间也更短,动态特性好。
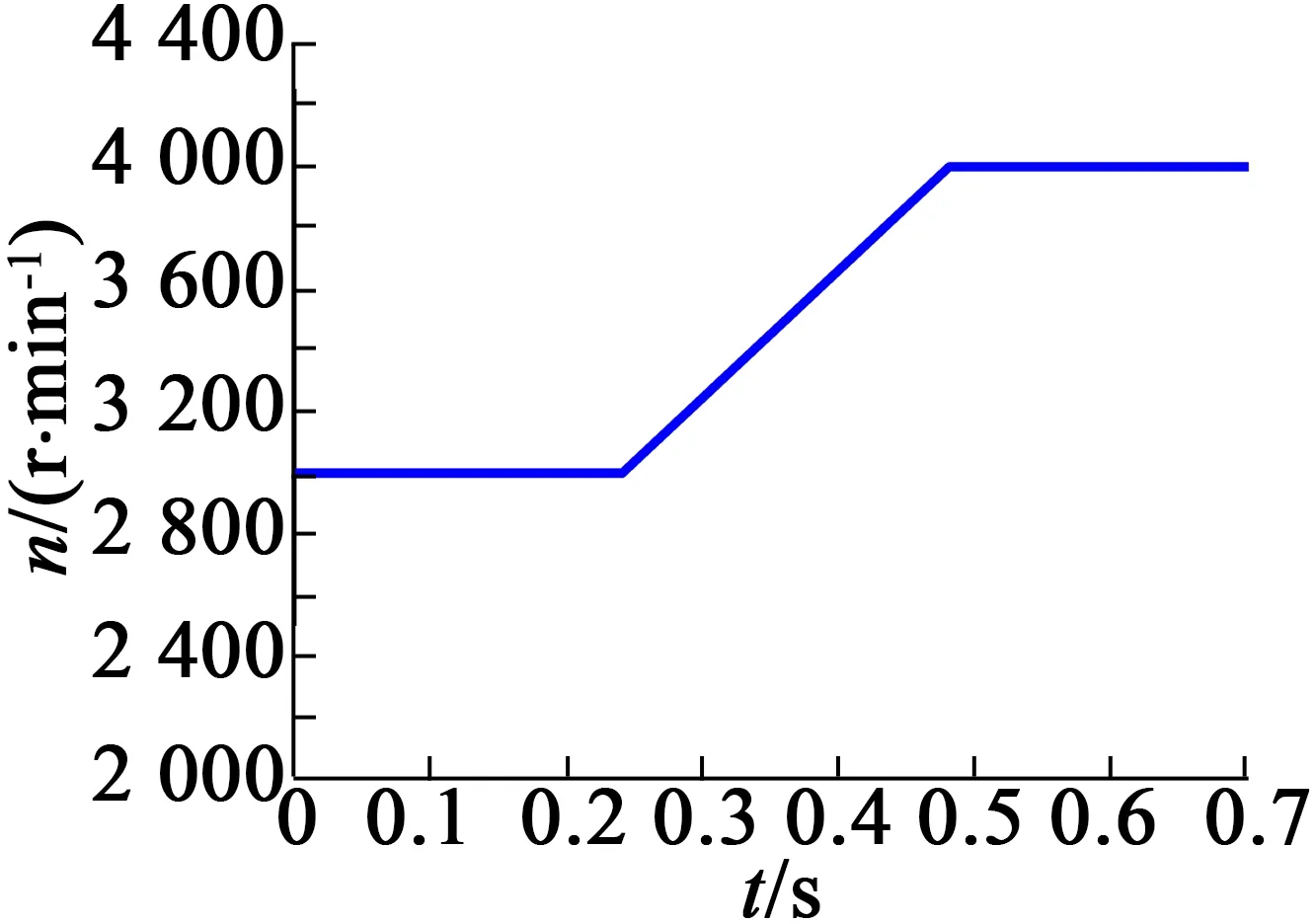
图6 给定转速变化曲线
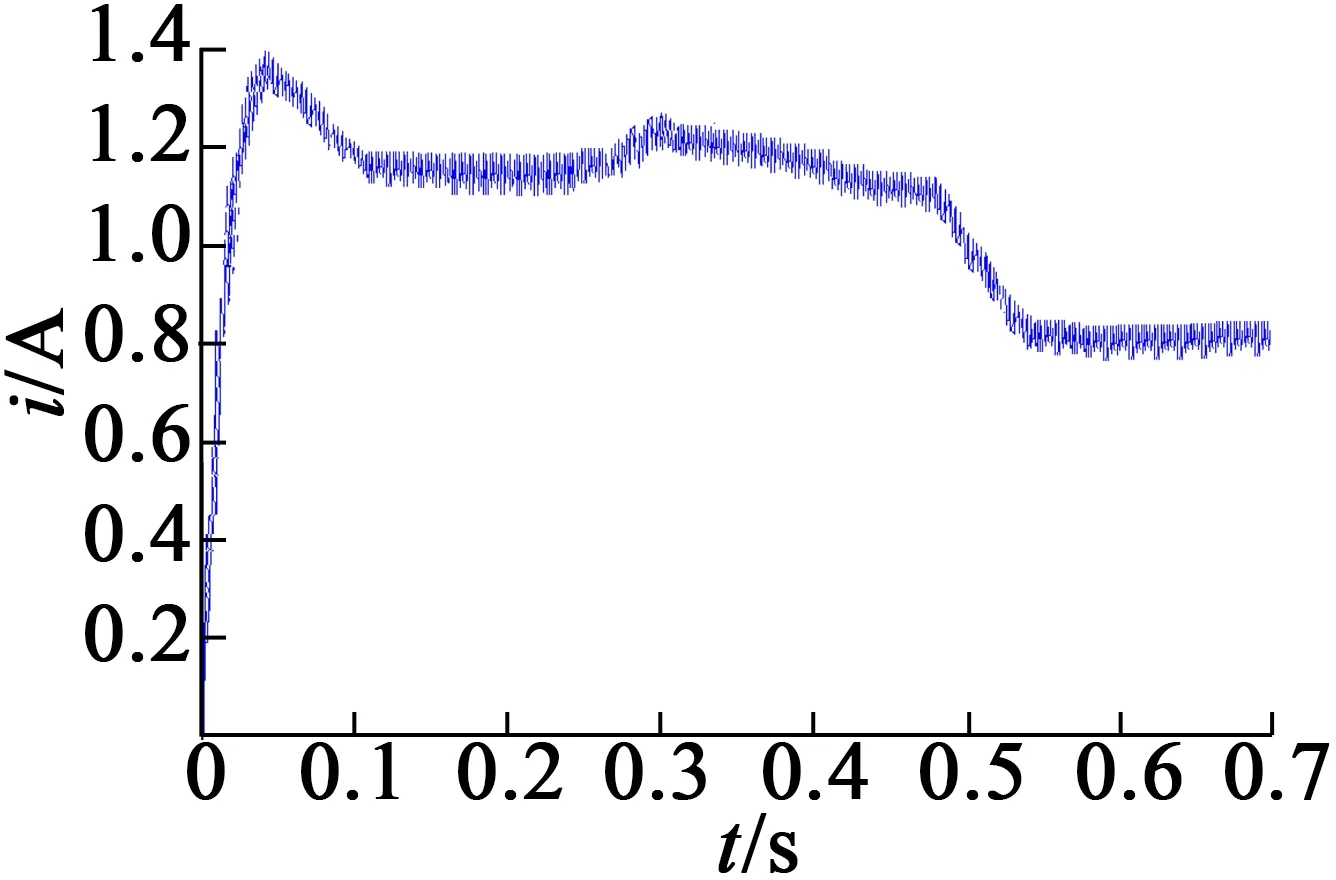
图7 励磁电流变化波形
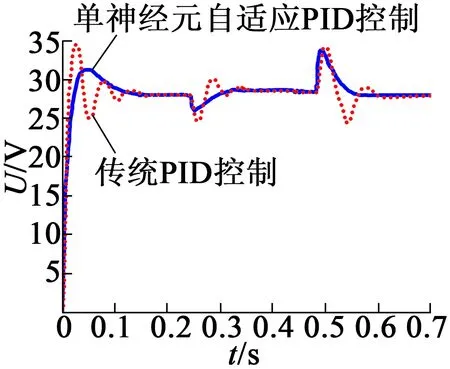
图8 输出电压波形
4 结 语
混合励磁无刷爪极发电机应用广泛,但由于其各绕组电感高度非线性且多耦合,常规的PID控制不能取得理想的控制效果,建立了单神经元自适应PID控制系统,根据混合励磁无刷爪极发电机的输出电压,动态调节励磁电流,使得输出电压保持稳定。整个控制系统通过在线动态调整加权系数,达到了在线控制的目的,其不仅结构相对简单,而且能适应环境变化,根据MATLAB的仿真波形结果,可以得出与常规的PID相比较,单神经元自适应PID控制系统具有更高的控制精度和鲁棒性,动态性能也更好。
[1] NI Youyuan,WANG Qunjing,BAO Xiaohua,et al.Optimal design of a hybrid excitation claw-pole alternator based on a 3-D MEC method[C]//Eighth International Conference on Electrical Machines and Systems.IEEE,2005: 644-647.
[2] BAO Xiaohua,HE Qingling,WANG Qunjing,et al.Research and optimal design on hybrid excitation claw-pole alternator for automobile application[C]//International Conference on Electrical Machines and Systems.IEEE,2008:3493-3496.
[3] 王群京,倪有源,姜卫东,等.汽车用爪极发电机负载磁场和电感的分析与计算[J].中国电机工程学报,2004,24(3):91-95.
[4] 乔东伟,王秀和,朱常青.新型混合励磁无刷爪极发电机的磁场调节特性分析及试验研究[J].中国电机工程学报,2013,33(9):115-121.
[5] 王秀和,乔东伟,朱常青.新型混合励磁无刷爪极发电机磁场调节特性的有限元分析[J].电机与控制学报,2013,17(7):99-104.
[6] 乔东伟, 王秀和, 朱常青. 新型混合励磁无刷爪极电机磁场调节特性的三维有限元分析[J]. 微电机, 2012, 45(4): 11-14.
[7] 夏长亮,李志强,王明超,等.基于RBF神经网络在线辨识的永磁无刷直流电机单神经元PID模型参考自适应控制[J].电工技术学报,2005,20(11):65-69.
[8] DU Chunyan,WU Aiguo,ZHENG Aihong.The application of single neuron adaptive PID method to the speed control of isothermal forging processes[C]//The Sixth World Congress on Intelligent Control and Automation.IEEE,2006:8519-8522.
Dynamic Performance Simulation of Hybrid Excitation Brushless Claw-Pole Alternator
LIJia-peng,ZHUChang-qing,SHENYi-ming
(Shandong University,Jinan 250061,China)
The hybrid excitation brushless claw-pole alternator is highly nonlinear and variable, thus the dynamic performance simulation model was built in the MATLAB/Simulink based on the single neuron PID control method. By using supervised Hebb learning algorithm, the model can adjust the weighted factor to achieve online control. The structure of the excitation controller was simple and it had great ability in adaptability, robustness, high control accuracy. According to the simulation results, with the changes of the rotational speed, the system enables the output voltage to keep steady by adjusting the excitation current and it has good dynamic performance.
hybrid excitation; claw-pole alternator; single neuron; PID; dynamic performance
2016-08-15
国家自然科学基金项目(51177090)
TM35
A
1004-7018(2017)02-0009-04
李家鹏(1991 -),男,硕士研究生,研究方向为永磁电机。
猜你喜欢
河北电力技术(2021年2期)2021-07-29 09:16:30
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
电子制作(2018年1期)2018-04-04 01:48:34
大电机技术(2017年3期)2017-06-05 09:36:02
电子制作(2017年1期)2017-05-17 03:54:12
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
云南电力技术(2015年2期)2015-08-23 01:31:52
电机与控制应用(2015年10期)2015-03-01 03:50:16
