基于FSM的联合收割机多按键控制系统设计
2017-03-29 05:38蔡阳阳
电子科技 2017年1期
陈 进,蔡阳阳,陈 璇
(江苏大学 机械工程学院,江苏 镇江 212013)
基于FSM的联合收割机多按键控制系统设计
陈 进,蔡阳阳,陈 璇
(江苏大学 机械工程学院,江苏 镇江 212013)
针对联合收割机传统操控方式繁琐、危险系数高的问题,设计了一种以按键调节各工作部件的控制系统,改变了联合收割机用操纵杆或机械结构的操控方式。针对按键控制过程中按键抖动对控制系统带来的影响以及多按键情况下代码的复杂性,提出了基于有限状态机的按键嵌入式程序设计方法。试验表明,有限状态机应用于按键系统设计能获得稳定的控制效果与功能要求。
联合收割机;操纵杆;ARM嵌入式;多按键控制系统;有限状态机
联合收割机的操控方式是反映其智能化与科技化水平的重要指标[1-2]。国外的联合收割机大多实现了工作部件的按键控制或触摸屏控制,智能化与自动化程度高[3]。国内还停留在对操纵杆与机械结构的操控,作业人员根据收割机的作业效果调整相关部件的工作状态时,操作过程复杂且危险系数高[4-5]。本文设计一套联合收割机多按键控制系统,能够提高联合收割机整体作业效率。
1 控制系统的结构设计
联合收割机的多按键控制系统总体结构图如图1所示,由ARM处理最小系统、传感器模块、按键模块、声光报警模块、执行机构模块及系统软件组成。
1.1 控制系统的硬件设计
按键模块包括清选筛开度增/减按键、脱粒滚筒转速升/降按键、粮仓出粮口开/关按键、割台高度升/降按键、拨禾轮高度升/降按键、前进速度手/自切换按键。

图1 多按键控制系统的总体结构框图
传感器模块包括:型号为M12的HKZ8002C霍尔传感器,检测前进速度、滚筒转速,传感器对于磁钢S极有检测能力;用于限制步进电机转动角度的光电限位开关,采用E12-D10NK型,有效作用距离0~7 cm;检测粮仓粮食高度的超声波传感器,采用LM-040-030-DAC型传感器,有效测量范围在0.3~3 m;检测割台与拨禾轮液压缸活塞位置、电动缸位移传感器采用MIRAN KTC-200 mm,有效行程200 mm;检测清选效果的损失量传感器。
输出部分:声光报警模块包括了粮仓、损失量的声光报警提示;执行机构模块包括了,用于清选筛开度调节的电动缸、驱动器,电动缸采用IAI的RCP2-RA3C型电动缸,有效行程50~200 mm,水平最大推力30 kg;脱粒滚筒、前进速度、粮仓操纵杆调节的步进电机、电机驱动器;割台高度、拨禾轮高度调节的4WRA6型电液比例阀,配套VT-3013型比例放大器。步进电机的转动角度由光电开关限位,电动缸采用闭环控制,电液比例阀采用PWM波输出驱动控制[6-7]。
1.2 系统部分执行部件的结构改装
前进速度、滚筒、粮仓均是以操纵杆实现调节,清选筛以机械结构调节。以前进速度和清选筛为例,图2为操纵杆的改造方案,图3为清选筛机械构件改造方案示意图[8-9]。

图2 前进速度操纵杆改造示意图
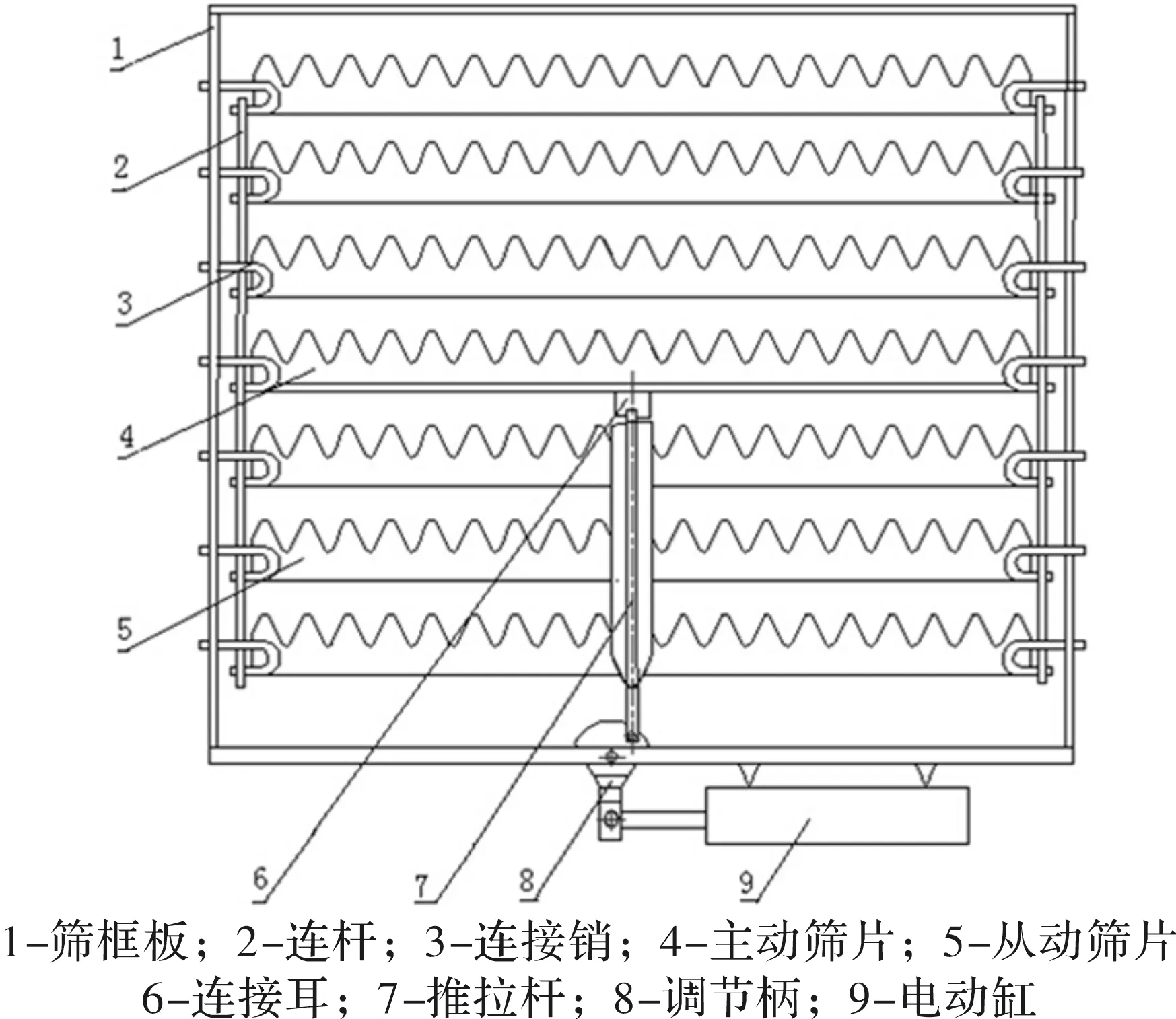
图3 鱼鳞筛机械构件改造方案示意图
这两种工作部件分别代表了系统对于传统的操纵杆与机械结构的改造方案。清选筛的原先用于操控的机械结构需要改造,将电动缸丝杆的位移转换成清选筛的开度变化,可得传动方程组为
(1)
式中,S1为电动缸丝杆与调节柄的连接点到调节柄固定轴的平面直线距离;S2为推拉杆与调节柄的连接点到调节柄固定轴的平面直线距离;S3为连接耳到主动筛片固定轴最近直线距离;S4为图示位置时推拉杆与调节柄的连接点至筛框板的垂直距离,即初始距离;Di为电动缸丝杆的位移距离,位移传感器测得;αi为电动缸丝杆与调节柄的连接点与调节柄固定轴的最短连线与竖直方向的夹角;βi为推拉杆与调节柄的连接点到调节柄固定轴的最短连线与水平方向夹角;γi为清选筛开度。
2 基于FSM的按键处理方法
2.1 FSM的基本原理
有限状态机(FSM)是一种实时系统设计中的数学模型,表示数个状态及在这些状态之间的转移和动作等行为,以描述控制特性为主的建模方法[10-11]。一个有限状态机表示为
M=(N,L,F,S0,Z)
(2)
其中,L表示接收的“事件”集合;N表示变迁函数,为状态转移函数,描述了系统中每个状态转移到其他状态的可能性;S0是一个特殊状态,一般指系统“初始状态”;Z是N的一个子集,定义为终极态的集合[12-13]。
2.2 基于FSM的多按键系统的软件设计
系统按键众多,但各按键可独立完成控制功能。可根据有限状态机的原理对单个按键动作的操作和确认过程进行分析[14]。粮仓与前进速度属于自锁拨钮式按键,而其他控制其他部件的自复位按键还分为长按与短按两种模式,可根据各自特点分别设计状态图。本系统中,按键与ARM处理器的I/O口相连,低电平有效,即“0”表示按键闭合状态,“1”表示按键开放状态。自锁按键选用粮仓控制按键绘制状态图,自复位按键选用割台来作为分析对象,绘制状态转换图。如图4所示,粮仓的控制按键开放状态为“粮仓关闭”状态,闭合为 “放粮”,放粮过程为“等待关闭”;如图5所示,短按模式为“慢升”,长按模式为“快升”。
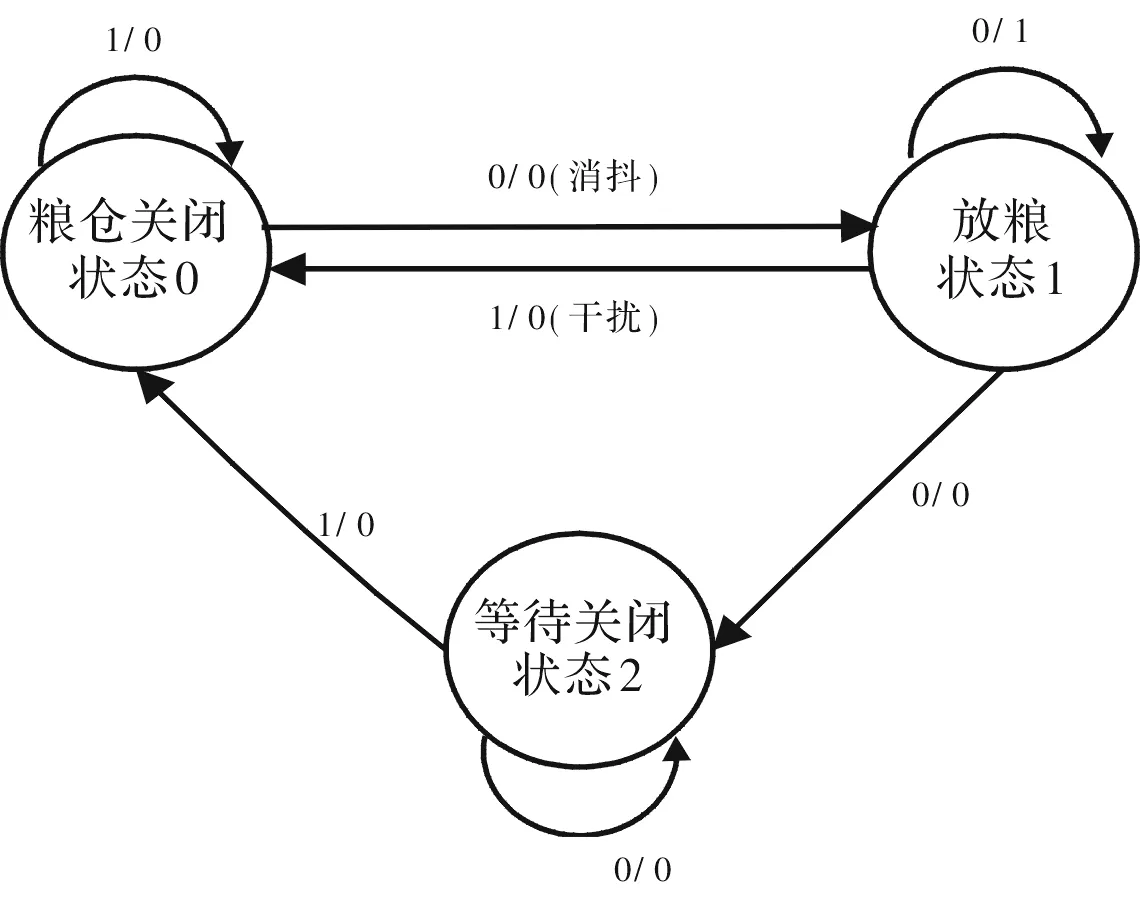
图4 粮仓按键状态转换图
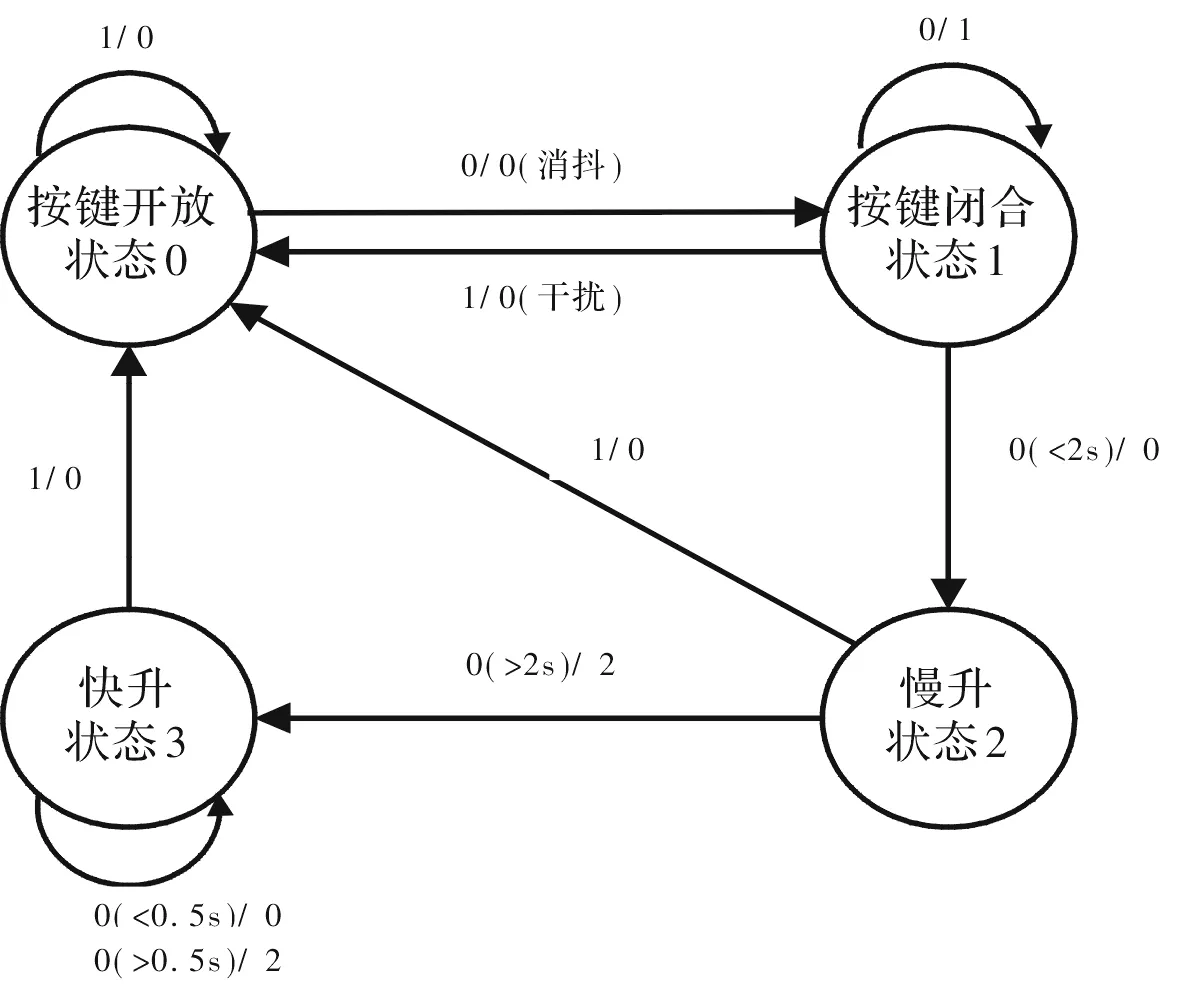
图5 割台按键状态转换图
图4和图5中,将前进速度、割台的1次按键完整的操控分别分为3个和4个状态。其中,状态0为按键开放状态,当按键输入为“1”时,表示按键开放,输出“0”(1/0),下一个状态依旧为按键开放状态“0”;当按键输入为“0”时,表示按键闭合,但需要经过消抖,10 ms后当再次检测到按键输入为“0”时,确认按键按下,输出“1”,否则返回状态“0”;粮仓控制按键状态“2”表示放粮过程,等待放粮结束,只有等到按键断开,才表示一个完整的按键过程;割台的确认按键按下后,在2 s内,按键依旧闭合,状态输入不变,输出“0”,转移到慢升状态“2”,按键松开,输入变化,输出“1”,返回状态“0”;2 s后,按键依然按下,输出“2”,转到状态“3”快升状态,0.5 s内按键松开,输出“0”,返回状态“0”,0.5 s后按键依旧按下,停留在状态“4”,否则返回状态“0”。这样就是一次完整的按键操作过程。

图6 按键程序设计流程图
由状态图分析可知,程序的编写可以使用多分支结构(IF-ELSEIF-ELSE、CASE等),而不是循环语句(WHILE、FOR等),这样程序代码结构清晰简洁,尤其在高频率的ARM控制系统中占用系统资源少[15-16]。有限状态机的程序设计流程图如图6所示。
3 实验验证
实验步骤如下:
(1)根据系统的硬件设计与改造方案,进行机器改装。主要是操纵杆的改装与机械结构的改装。绘制清选筛开度与电动缸丝杆的关系曲线,如图7所示;

图7 清选筛开度与丝杠位移关系曲线
(2)进行按键的硬件设计,将系统的自复位按键布置于操控手柄上,操控手柄的正面侧面均有按键,方便作业人员操作,自锁拨钮按键固定于操控台,手柄置于前进速度操纵杆上;
(3)为验证按键功能的实现效果,将控制效果显示于触摸屏,如图8所示。其中拨禾轮高度为距离割台的高度,粮仓由声光报警装置反馈是否放粮。
在田间实验中,短按割台升按键时,割台升高2 cm,长按之后,割台每0.5 s升高2 cm直至松开按键;拨禾轮操作同割台;当粮仓声光报警时操作粮仓按键,粮仓放粮,放粮结束后再次操作按键关闭粮仓;清选筛筛片调节用电动缸推动,位移传感器反馈电动缸丝杆位置,操作按键,2 s内变化3 mm,长按后,每0.5 s变化3 mm,实现清选筛开度的量化调节。
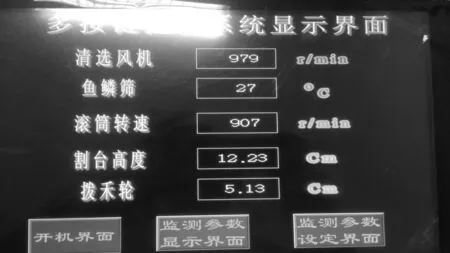
图8 按键控制效果显示
4 结束语
(1)本文设计的多按键控制联合收割机工作部件的控制系统,能够改变现有的联合收割机的作业操控方式,取代多个操纵杆与机械构件,同时可保留机器的传动结构与动力方式,在实现电控与自动化的基础上大大幅节省了成本;(2)系统中多按键在控制过程中可能出现的抖动与电磁干扰等问题,提出了有限状态机的程序设计方法,既解决抖动干扰的问题,又实现按键功能设计,简化程序设计过程,实现系统功能更稳定有效。
[1] 孙桂芹.国内外通用型联合收割机的技术现状和发展趋势[J].中国机械,2014(19):226-227.
[2] 介战,刘红俊,侯凤云.中国精准农业联合收割机研究现状与前景展望[J].农业工程学报,2005,21(2):179-182.
[3] Maertens K,Baerdemaeker J D. Design of a virtual combine harvester[J].Mathematics and Computers in Simulation,2004,65(1-2):49-57.
[4] 西北农林科技大学.一种电驱动智能联合收割机控制系统:中国,CN201310229389.2[P].2013-11-27.
[5] 汤碧翔.基于ARM9嵌入式系统的联合收割机负荷反馈控制系统的研究[D].镇江:江苏大学,2009.
[6] 朱剑,尹文庆,谢蓓.基于嵌入式的电液比例控制系统在联合收割机割台高度控制中的应用[J].液压与气动,2012(1):83-86.
[7] 庹朝永.联合收割机行走速度分析及控制系统设计[J].农机化研究,2011,33(8):97-100.
[8] 江苏大学.一种联合收获机清选筛筛片开度的调节装置.中国,CN201310691182.7[P].2014-04-02.
[9] 梁振伟,李耀明,赵湛.纵轴流联合收获机籽粒夹带损失监测方法及传感器研制[J].农业工程学报,2014(3):18-26.
[10] 朱晟仁,黄瑞光.有限状态机在动画角色行为中的建模应用[J].计算机技术与发展,2007,17(6):130-132,182.
[11] 王武斌.嵌入式系统的按键接口设计技术[J].电脑开发与应用,2011,24(3):39-41.
[12] 方龙,肖献保,李威.关于消除按键机械抖动的研究[J].轻工科技,2008,24(1):92,105.
[13] 秦国栋.有限状态机的嵌入式Linux按键驱动设计[J].单片机与嵌入式系统应用,2010(4):79-81.
[14] 徐智穹,刘健,邱浩.有限状态机在嵌入式软件设计中的应用[J].低压电器,2008(13):20-21,28.
[15] 程科.嵌入式Linux设备驱动程序的设计与研究[D].成都:电子科技大学,2007.
[16] 胡世昌,杜庆东.面向对象程序内部的两种不同实现[J].沈阳师范大学学报:自然科学版,2009,27(1):71-74.
Design of Multi-Key Embedded Control System of Combine Harvester Based on FSM
CHEN Jin,CAI Yangyang,CHEN Xuan
(Mechanical Engineering, Jiangsu University, Zhenjiang 212013, China)
In view of the disadvantages of combine harvester traditional control methods, a multi-key control system is designed to replace the traditional multiple levers and the mechanical structure, and it changes the traditional way of manipulating combine harvester. In view of the influence of key jitter and electromagnetic interference on the system, the finite state machine is proposed when design the embedded program of the keys, and the simulation test is carried out. Tests shows that the finite state machine used in the design of the keys achieved a stable control effect.
combine harvester; multiple levers; ARM embedded system; multi-key control system; finite state machine
2016- 03- 05
国家高技术研究发展计划(863计划)基金资助项目(2012AA10A502);国家科技支撑计划基金资助项目(2010BAD01B06)
陈进(1959-),女,教授,博士生导师。研究方向:现代农业装备。蔡阳阳(1991-),男,硕士研究生。研究方向:联合收割机电气化。
10.16180/j.cnki.issn1007-7820.2017.01.042
TP273;S225.31
A
1007-7820(2017)01-154-04
猜你喜欢
工业设计(2022年9期)2022-10-13
今日农业(2022年14期)2022-09-15
时代文学·上半月(2019年6期)2019-12-13
北京航空航天大学学报(2019年9期)2019-10-26
农机使用与维修(2018年5期)2018-07-05
宝藏(2017年10期)2018-01-03
幼儿画刊(2017年5期)2017-06-21
中小企业管理与科技·下旬刊(2016年4期)2016-11-19
黑龙江科学(2011年2期)2011-03-14
空间控制技术与应用(2010年5期)2010-12-23