基于EPS的永磁同步电机弱磁控制仿真研究
2017-03-29 05:37钱伟康施煜涛
电子科技 2017年1期
钱伟康,郭 论,洪 晨,施煜涛
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于EPS的永磁同步电机弱磁控制仿真研究
钱伟康,郭 论,洪 晨,施煜涛
(上海理工大学 光电信息与计算机工程学院,上海 200093)
针对EPS系统中永磁同步电机在升速阶段,电流过大和高速阶段稳定性差的问题,考虑到EPS系统的特点和特殊要求,在分析永磁同步电机弱磁原理的基础上,选用MTPA(最大转矩)弱磁控制策略,通过转矩控制达到减少升速时间的目标;利用修正电流值来控制弱磁,从而实现增大调速范围。实验在Matlab/Simulink下搭建了仿真模型,通过对比永磁同步电机在不同运行阶段参数,结果验证了此方法的可行性和正确性。
EPS;永磁同步电机;弱磁;调速
EPS即电动助力转向系统,是汽车转向系统的发展方向。该系统由电动助力机直接提供转向助力,省去了液压动力转向系统所必需的动力转向油泵、软管、液压油、传送带和装于发动机上的皮带轮,既节省能量,又保护了环境。由于采用高能量的永磁体作为激励机制,永磁同步电机(PMSM)设计上采用高能量密度,高速度和高运行效率,这使得其成为下一代汽车转向系统的研究方向。
永磁同步电动机( PMSM) 具有高效、高控制精度、高功率密度和转矩密度、低噪声等特点,以及较好的弱磁扩速能力,在汽车EPS系统中具有很强的竞争力[1]。EPS系统特别要求具有良好的转矩控制能力、较宽的调速范围、高速时能输出恒定功率及其高可靠性等,因此对用永磁同步电动机进行弱磁控制,对改善汽车高速运行性能等方面具有重要意义。但电动机定子电流直轴分量所形成的去磁磁动势作用会导致永磁体性能变坏,是人们关注的一个实际问题;此外,随着电机转速的升高,由于供电电压的限制,也会影响电机的电磁转矩的性能,影响电机高速运行的范围及稳定性。因此,电机需要减弱磁场运行,由于永磁同步电机中励磁磁场是一定的,不可能直接将其减弱以获得弱磁控制。所以,只能利用直轴电流,减弱电动机的气隙磁场,已达到弱磁控制的效果。这即是永磁电机弱磁控制的基本思想[2]。
本文在永磁同步电动机的数学模型的基础上,研究了永磁同步电机的弱磁控制原理及其控制策略,最后结合EPS驱动电机的运行特点,在Matlab/Simulink中对永磁同步电机弱磁控制系统进行了仿真和研究,并给出了仿真波形。
1 永磁同步电机数学模型及控制原理
为简化分析,以建立永磁同步电机dq轴数学模型,假设如下:(1)定子三相绕组对称分布、气隙均匀并且忽略电机铁心的饱和;(2)不计电机的涡流和磁滞损耗;(3)转子上无阻尼绕组,永磁体也没有阻尼作用;(4)反电动势波形为正弦。
电压方程
(1)
电磁转矩方程
Te=p(ψdiq-ψqid)=p[ψfiq+(Ld-Lq)idiq]
(2)
机械运动方程
(3)
ud、uq、id、iq、ψd、ψq、Ld和Lq分别为定子电压、电流、磁链和电感的dq轴分量;Rs为定子相绕组电阻;ψf为永磁体产生的磁链;p为极对数;ω为电机电角速度;Te、TL、J、F分别为电机电磁转矩、负载转矩、转动惯量和粘滞摩擦系数。
由于受逆变器产生的最大电压及电机本身的限制,若想将转速拓展到额定值以上是不可能的。为此,必须减小定子磁链,即弱磁,才能进一步提高转速。由于弱磁控制工作高速范围,为了简单起见,忽略定子电阻Rs电压压降。这样电机弱磁稳态运行时定子电压峰值为
(4)
在确定直流母线电压的情况下,逆变器所能输出的最大定子电压Usmax也是确定不变的;且由于电机工作时发热等原因,在一定的温升允许情况下,定子绕组允许流过的最大电流Ismax也是不变的。这样,电机在弱磁工作区工作时定子电流is和端电压us也会受到如下条件制约
|is|≤Ismax|us|≤Usmax
(5)
式中,Ismax为定子电流允许的最大值;Usmax为定子端电压允许的最大值。
从式(5)可看出,电流限制为一个圆形
(6)
因此,只要控制定子电流在此园的范围内,可满足最大定子电流限制要求,即定子电压限制为一个椭圆
(7)
从式(7)可看出,由于Usmax的限制,电机不可能无限升速,当电机角速度达到ωr即ωrψs=Usmax时,若要求继续升速,就只能靠减弱气隙磁场来实现,这就是所谓的弱磁减速。对于永磁同步电机,永磁体产生的磁场是固定的,无法调节,只有通过调节定子电流来削弱磁场,才能维持高速运行时电压方程的平衡。
由式(5)和式(7)可知,电流极限园和电压极限椭圆如图1所示。图中最大转矩/电流控制轨迹为曲线OA,弱磁控制时定子电流沿曲线AB直到B点,从而实现弱磁升速。

图1 定子电流矢量轨迹图
2 永磁同步电机控制策略
永磁同步电机永磁体产生的磁链和直交轴电感Ld、Lq确定后,电机的电磁转矩Te便取决于定子电流矢量is,而is大小相位取决于id和iq[6-9]。因此,只要控制id和iq便可控制电机的转矩。一定的转速和转矩对应于一定的id和iq。分别比较电机的电流实际值id和iq与给定值,实现其转速和转矩控制。并且, 和 独立控制,可便于实现其他各种先进控制策略。

图2 仿真模型图
为获得最大转矩,需要控制电机的定子电流。电机会运行在3个区段,如图1所示。
(1)当电机运行在基速以下时,此时输出转矩的上限是一定的,为额定转矩,转矩的矢量控制策略一般采用MTPA——最大转矩/电流控制,如图1中的OA段。θ为定子电流矢量与d轴的夹角,则有
(8)
对式(2)求偏导得
(9)
可得电流矢量的电流运行控制方程为
(10)
(2)当电机的运行速度大于基速时,由于受到电压和电流极限环限制,电机进入弱磁区域运行,如图1中的AB段。电机运行于某一转速ωe时,可得弱磁运行的矢量控制方程
(11)
(12)
通过构造拉格朗日函数求偏导可得出最大输出功率运行时的电流矢量控制方程
(13)
(14)
(3)当电机最大转矩弱磁运行时的电流矢量轨迹如图1中的 段所示。由式(13)和式(14)可求出电机达到最大输出功率点B时的转速为ωB,从而求出此时转矩Te。
3 系统仿真分析
在理论分析的基础上,在Matlab/Simulink中利用Sim Power System丰富的模块,搭建了如图2所示的弱磁控制永磁同步电机的仿真模型。

图3 电机转速
所选用的电机参数为:定子电阻Rs=1.5 Ω,直轴电感Ld=0.04 H,转子感应磁链ΨR=0.195 Wb,极对数p=4,转动惯量J=0.001 38 kg·m2。仿真实验中,IGBT输入的直流电压为400 B,额定转速ωN=3 000 rad/s,额定负载转矩为3 N·m。
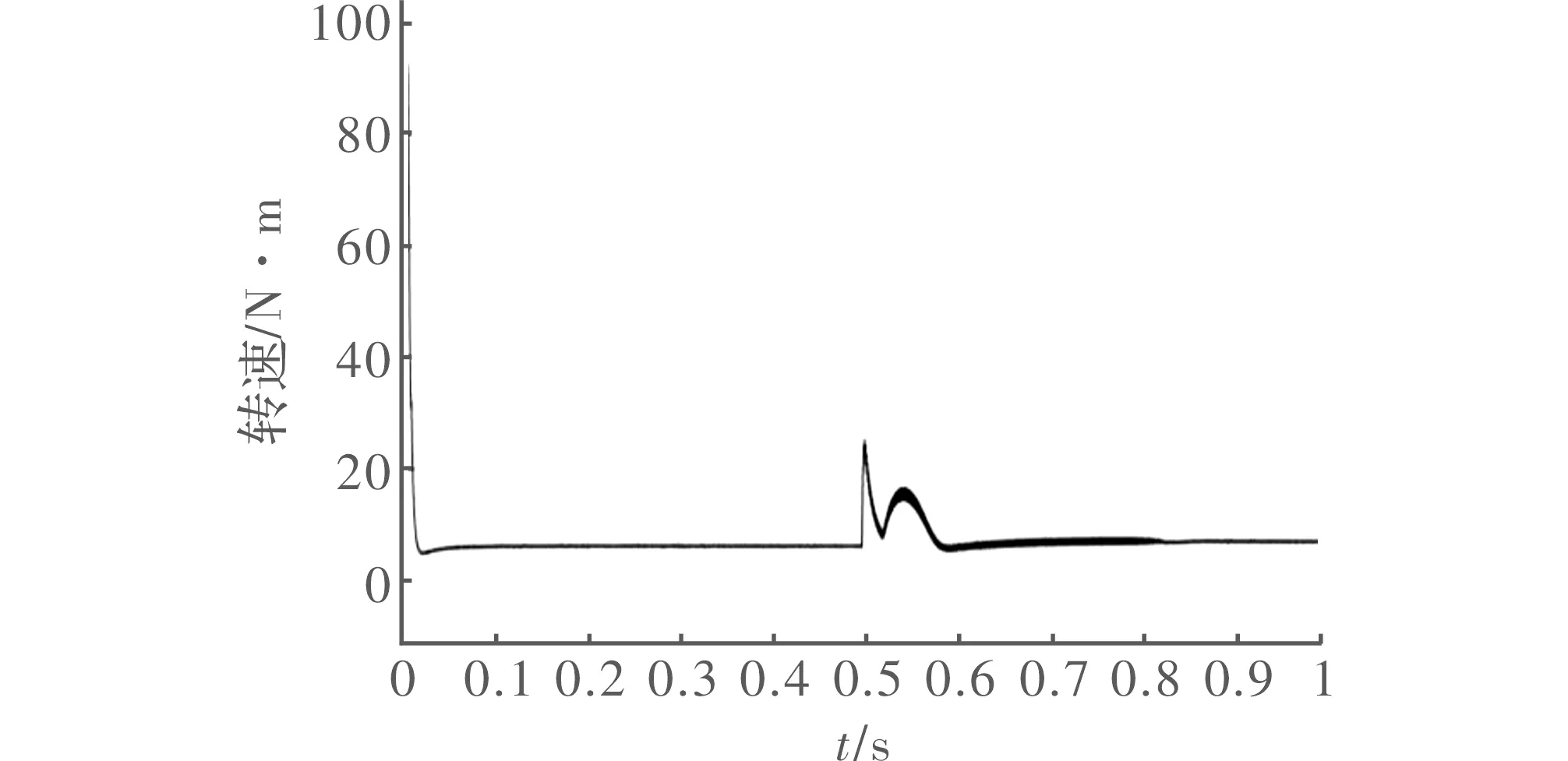
图4 电机转矩

图5 三相电流

图6 轴电流

图7 轴电流
从图中可看出,在经历短暂的启动阶段后,电机以给定的初始转速稳定运行。在0.5 s时,给定转速增速到5 000 rad/s,0.5~0.6 s为升速阶段,负载转矩也发生突变,0.6 s后电机便以5 600 rad/s的转速稳定运行。
在电机处于启动和升速阶段时候,系统采用最大转矩控制,这两个阶段电机的电磁转矩达到最大;在转速达到基速后,系统采用弱磁控制,调速范围明显扩大,额定负载时最高转速可达5 600 rad/s,约为基速的两倍,而且定子电流波形稳定,没有随速度的升高而明显变大。
4 结束语
本文通过对永磁同步电机弱磁控制原理分析,建立了永磁同步电机MTPA弱磁控制系统。仿真结果表明,通过弱磁控制可较好的拓宽电机的调速范围,有效提高恒功率运行区域的调速比,且系统具有良好的动态和稳态性能,能较好地满足EPS系统的性能要求。
[1] 张树团,李伟林,鲁芳,等.永磁同步电机弱磁调速系统建模及仿真研究[J].船电技术,2010,30(6):14-17.
[2] 李训杰,耿连发.现代永磁电动机交流伺服系统的发展和应用[J].电机技术,2009(5):20-22.
[3] 刘军,俞金寿.永磁同步电机控制策略[J].上海电机学院学报,2007,10(3):180-185.
[4] 廖勇,伍泽东,刘刃.车用永磁同步电机的改进MTPA控制策略研究[J].电机与控制学报,2012,16(1):12-17.
[5] 李发海.王岩.电机与拖动基础[M].北京:清华大学出版社,2012.
[6] 石良臣.Matlab/Simulink系统仿真超级学习手册[M].北京:人民邮电出版社,2014.
[7] 王春民,嵇艳鞠,栾卉,等.Matlab/Simulink永磁同步电机矢量控制系统仿真[J].吉林大学学报:信息科学版,2009,27(1):17-22.
[8] 杨平,马瑞卿,张云安. 基于Matlab的永磁同步电机控制系统建模仿真新方法[J].微电机,2005, 38(5):38-41.
[9] 李珍国.交流电机控制基础[M].北京:化学工业出版社,2010.
Research on the MTPA & Weak Magnetic Control of the Permanent Magnet Synchronous Motor base on the EPS
QIAN Weikang,GUO Lun,HONG Chen,SHI Yutao
(School of Optical-Eletrical and Computer Engineering,Unversity of Shanghai for Science and Technology, Shanghai 200093, China)
This paper aims at the problem of the overload of current in the acc stage and poor stability in high speed operation stage of the permanent magnet synchronous motor’s in EPS.And in consideration of the characteristic of the EPS system,based on the weak magnetic analysis of the permanent magnet synchronous motor,we chose MTPA weak magnetic control strategy by controlling the torque to reduce acc time;Used fixed current value to control the weak magnetic so as to realize the increase speed range.This experiment established on the Matlab/Simulink model,compared the parameters of the permanent magnet synchronous motor in different running stage,and the results verify the feasibility and correctness of this method.
EPS; permanent magnet synchronous motor; weak magnetic; speed control
2016- 02- 26
钱伟康(1957-),男,副教授,硕士生导师。研究方向:电子信息,检测技术等。
10.16180/j.cnki.issn1007-7820.2017.01.031
U463.44;TM341
A
1007-7820(2017)01-111-04
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年6期)2020-12-14
测控技术(2018年2期)2018-12-09
光学精密工程(2016年3期)2016-11-07
电机与控制应用(2015年10期)2015-03-01
大电机技术(2015年5期)2015-02-27
电力工程技术(2014年1期)2014-03-20
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28