一种复杂指针式仪表的读数自动识别算法
2017-03-29 04:53任青青胡艳侠朱少君谢磊金
计算机技术与发展 2017年3期
李 伟,任青青,胡艳侠,朱少君,谢磊金
(长安大学 信息工程学院,陕西 西安 710064)
一种复杂指针式仪表的读数自动识别算法
李 伟,任青青,胡艳侠,朱少君,谢磊金
(长安大学 信息工程学院,陕西 西安 710064)
针对仪表表盘背景复杂且有液体填充物的指针式仪表,为了得到更加精确的读数,提出了一种新颖实用的基于图像处理技术的指针读数识别方法。该方法在综合运用自适应阈值迭代法对图像二值化及形态学与剪影法结合的边缘提取算法进行图像预处理的基础上,采用Hough变换圆检测和para空间均值圆心的方法确定仪表的圆心,创造性地采用了基于传统中心投影法的双向扫描求取均值确定角度的算法,并应用角度法计算出仪表指针读数。采用传统中心投影法及其改进算法进行了同步对比验证实验,并对两种方法的误差进行了对比评估和分析。实验结果表明,改进算法性能稳定,特别对于旋转的仪表指针识别具有较高的精度和较强的实时性。
中心投影法;Hough变换;指针式仪表
0 引 言
指针式仪表因其结构简单、操作方便、性能稳定、成本低等特点,一直以来在工业控制、汽车船舶、航空航天等领域得到了广泛应用。仪表校验是保证仪表结构完好、读数准确可靠的重要技术手段。在指针识别方面,学者们进行了大量研究。有的学者设计了指针识别系统[1-2],但是可靠性不高;刘迪等[3]提出了非均匀光照下指针式仪表自动判读算法设计;丁婵等[4]运用图像剪影技术,通过调节图像分辨率实现指针的检出,通过转换偏转角度的基线位置,确定出仪表指针的读数;汪泽涛等[5]提出了一种指针式仪表非接触测量方法。但上述几个文献都采用Hough变换直线检测指针,且实验仪表为背景简单的电压或者电流表,针对背景复杂且有液体填充物形成水印的仪表,上述方法就不再适用。
为此,文中提出利用改进的快速中心投影法和Hough变换[6-8]圆检测与彩色分割相结合的方法,对具有复杂背景的仪表效果显著。
1 算法总体框图
该算法的总体框图如图1所示。
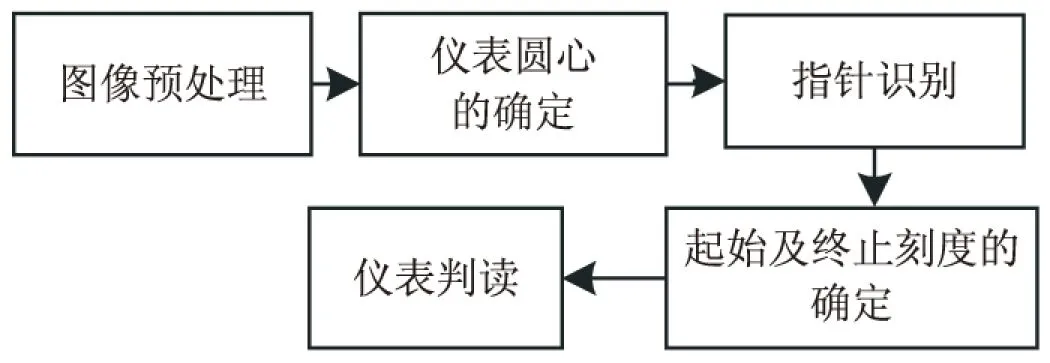
图1 仪表识别算法框图
为了精确识别出指针读数,首先对采集的仪表图像进行预处理,包括灰度化、二值化、边缘提取等;其次采用Hough变换圆检测与para空间均值圆心相结合的算法识别出圆心;再利用改进的快速中心投影法识别出指针角度;然后采用彩色分割及连通域面积特征的方法识别出起始刻度线及终止刻度线;最后由角度法计算出仪表指针读数。
2 图像预处理
对采集到的仪表图片先进行图像的预处理,以便后期Hough圆检测可以准确、高效的识别出仪表的圆心,指针识别预处理包括灰度化、二值化及边缘检测等。
2.1 二值化
为了准确提取出指针,需要对图像进行阈值分割。首先将真彩图转换为灰度图,然后再对灰度图像进行阈值分割。所谓传统的二值化[9-10]方法,一种是通过全局阈值,另一种是通过局部阈值来处理目标图片[11-12],但在实际的判读中,由于受被测仪表的环境亮度、表盘背景等因素影响,将会造成图像的亮度发生变化。若选用固定的阈值进行二值化处理,不能适应这种变化。
文中选用迭代法对仪表图像进行二值化,首先求出灰度图像像素的最大灰度值fmax和最小灰度值fmin的平均值。
(1)
再根据阈值Ti将图像分为前景和背景,分别求出两者的平均灰度值Z1和Z2,最后求出新阈值:
Ti+1=(Z1+Z2)/2
(2)
如果所求Ti等于Ti+1,则所得即为阈值,否则继续迭代求Ti+1,这样确定的二值化阈值能够很好地适应外部环境的变化。仪表原图和二值化后的结果图分别如图2(a)和(b)所示。
2.2 边缘提取
边缘检测的有效性直接影响Hough变换检测圆的准确性。传统的边缘检测方法很多,比如Roberts边缘检测、Prewitt边缘检测、Log边缘检测、Canny边缘检测等。但是对于仪表表盘有水印和彩色刻度环即表盘纹理比较复杂的指针式仪表,用以上方法对仪表边缘进行提取都会丢失重要信息,这样就不能利用Hough变换很好地识别出圆。所以,文中选用形态学与剪影法相结合的边缘提取方法,可以提取出更全的仪表边缘信息。首先利用形态学对二值化后的仪表图像进行腐蚀操作得到腐蚀后的图像,然后利用剪影法将二值化后的图像与腐蚀后的图像相减得到边缘图像,该方法可以很好地保留仪表的边缘。仪表边缘提取图像如图2(c)所示。
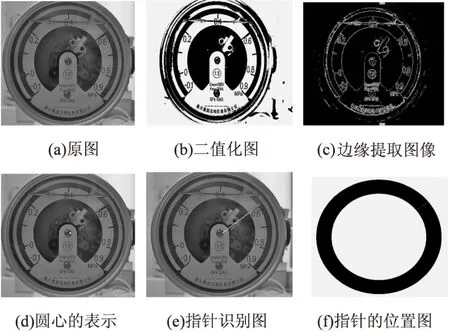
图2 仪表指针处理图
3 仪表圆心的确定
对于仪表圆心的识别,采用基于Hough变换圆检测和para空间均值圆心的方法确定仪表的圆心。Hough变换就是对图像像素进行某种形式的坐标变换。Hough变换原理就是过x-y平面上固定点的所有圆的a-b-r对应于参数空间中的一个三维锥面。这样,检测x-y平面上圆的问题就转换到检测a-b-r参数空间上三维锥面的交点。
由Hough变换检测圆的原理可知,只要找到参数空间中圆的交点即可,交点的累加值是参数空间中最大的。Hough变换算法的具体步骤如下:
(1)清空变换域,初始化阈值p为0~1之间的数。
(2)空间转换,把图像空间转换到参数空间,转换公式如下:
a=x-r×cosθ1
(3)
b=y-r×sinθ1
(4)
其中,a,b为圆心的横、纵坐标;x,y是图像像素点的横、纵坐标;r为半径;θ1为查找角度。r和θ1都是以一定的步长变化的值。
(3)经Hough变换后,需要在变换域内搜索峰值。
Hough变换将所有检测到的圆心坐标存储在para空间中。为了准确得到圆心坐标,将para空间中存储的圆心坐标累加求均值得到仪表的圆心坐标。圆心坐标在原图中的显示如图2(d)所示。
4 指针识别
针对仪表表盘比较复杂,且表盘有色彩干扰及液体填充物分界线的影响,对图像进行二值化之后,仪表表盘的分界线也比较明显,所以采用中心投影法[13-14]可以识别出指针的位置及角度;但是由于在运用角度法识别指针时,会产生指针夹角的测量误差,进而会对仪表读数产生较大影响,使读数误差较大。为了提高指针角度识别的准确性,采用改进的中心投影法对指针进行识别,且在有限的圆环内进行识别,从而提高了识别的速度及精度。识别框图如图3所示。
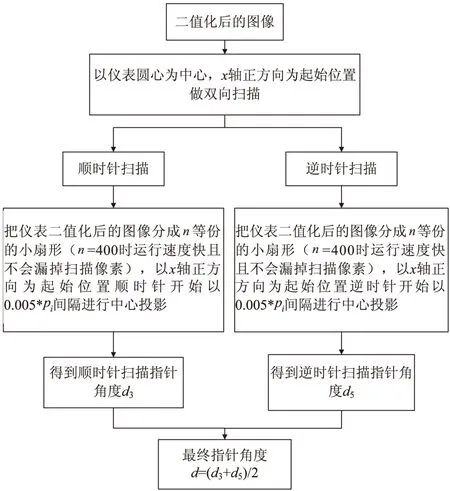
图3 指针识别流程图
具体步骤如下:
(1)把仪表盘分成n个子区域,文中n取400,每个子区域都对应一个角度θ。
(2)初始化一个角度值集合A(θ),使其包含所有要投影的角度值,即整个圆周。设定起始搜索角度、终止搜索角度及搜索角度步长,以水平方向开始顺时针扫描,搜索步长为0.005*pi。
(3)从未被选过的子区域中选出一个,在子区域内进行中心投影。
(4)判断搜索角度是否达到终止搜索角度,若没有则跳转到步骤(3)继续进行,否则停止搜索,算法结束。
(5)检测出投影后所有极大值imax的角度集合,在A(θ)中筛选出最大值的角度col,然后换算成指针的角度:
(5)
(6)
同理,用同样的方法进行逆时针扫描,通过求顺时针与逆时针所得指针角度的均值得出指针角度。实验结果表明,相对于传统的中心投影法,该算法对指针的识别更加准确。图2(e)是改进方法识别指针图,图2(f)为二值化后的指针位置图,白色细线即为指针位置。
5 起始及终止刻度线的确定
提取起始、终止刻度线是为了计算指针的读数做准备。由于这种复杂的仪表刻度环上基本都会有颜色,所以也不可能提取出所有的刻度线。文中选用彩色分割[15]及连通域面积特征来提取起始、终止刻度线,具体步骤如下:
(1)将RGB转换到HSV空间,提取出S分量,然后进行中值滤波。
(2)将提取出的S分量图像二值化,去除刻度环以外的连通域,保留有用的刻度环。
(3)为了更加准确地提取出起始、终止刻度线,根据刻度环连通域不同的面积分别识别出起始刻度线以及终止刻度线。
(4)根据提取出的起始和终止的连通域,以检测的仪表圆心为中心,水平方向为正方向建立坐标系,找到离水平方向距离最远的点,也即连通域最下面的点即为起始刻度上的点,同理找到终止刻度点,然后由圆心分别拟合成起始刻度线及终止刻度线。
仪表指针的识别过程如图4所示。
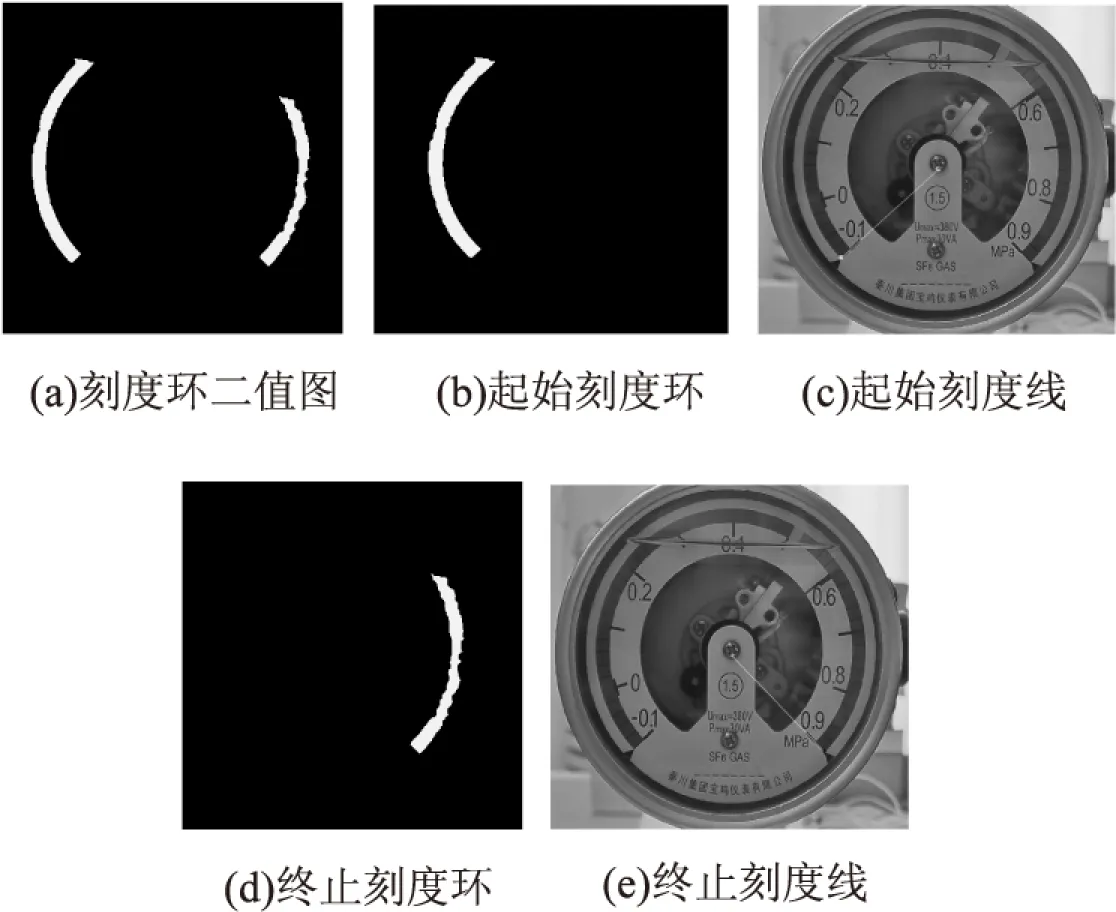
图4 仪表的指针识别过程
6 仪表判读
以识别出的指针、起始刻度线及终止刻度线为依据,文中采用角度法[16]对仪表进行判读。
以仪表圆心为中心,水平方向为正方向建立坐标系,当指针位置在0°~270°时,仪表读数为:
y=-0.1+(α-d)×D
(7)
当指针位置在270°~360°时,仪表读数为:
y=-0.1+(2×pi-d+α)×D
(8)
其中,α为起始角度;d为求出的仪表指针角度;D为仪表刻度每个弧度代表的读数。
7 实验与结果分析
实验选用六氟化硫气体压力表,并对指针在不同位置进行识别,用该方法对20幅图像进行识别。表1是传统中心投影法与改进的中心投影法的绝对误差与相对误差的对比图。实验结果表明,文中方法明显提高了读数精度,而且对旋转的仪表图像指针识别也同样准确。
图5是不同仪表以及旋转仪表的指针识别结果图。
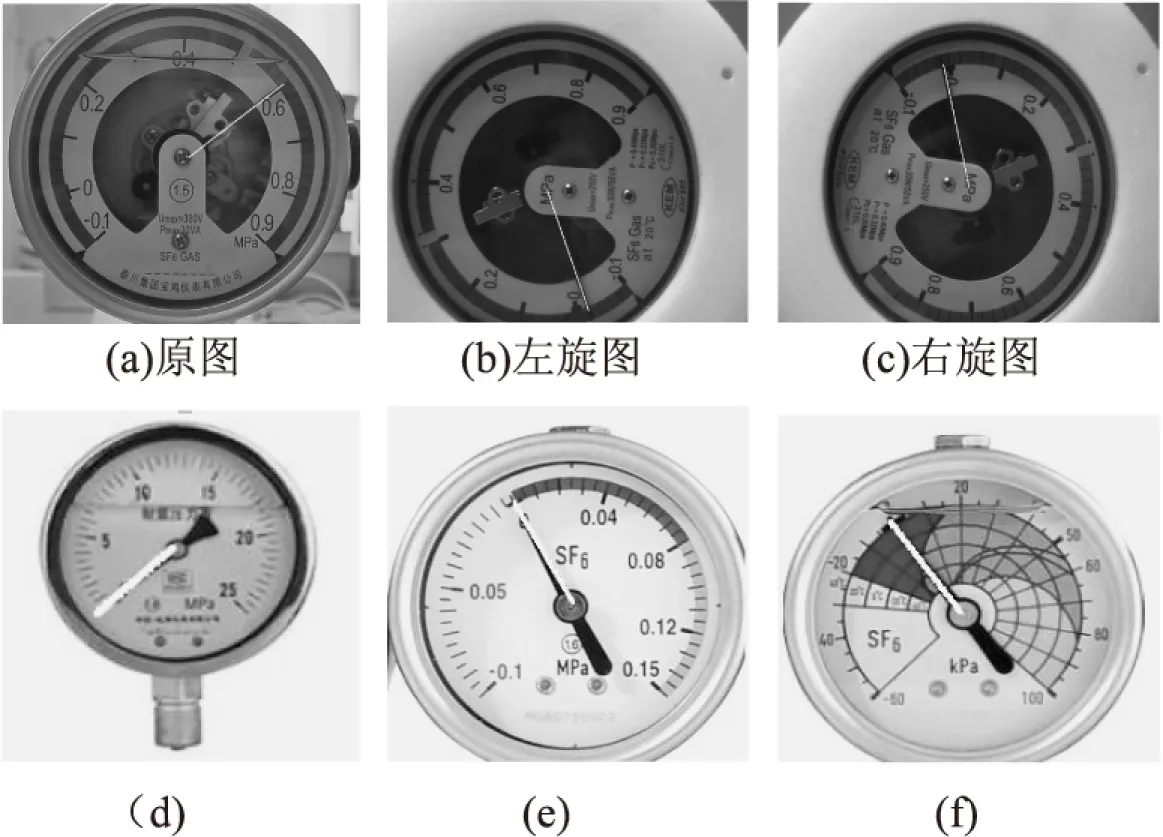
图5 不同的仪表识别结果
8 结束语
文中采用Hough变换圆检测和para空间均值圆心的方法确定仪表圆心,根据改进的快速中心投影法识别出指针的位置及角度,由彩色分割与连通域面积特征算法结合识别起始刻度线及终止刻度线,结合实际仪表限定角度搜索范围及搜索区域,提高指针检测的速度,确定仪表的读数。该方法识别精度高,准确性好,适合不同形状的仪表表盘的识别,为后续更高难度的指针式仪表读数工作奠定了基础。实验结果表明,该算法简单、稳定且识别误差小,具有较为显著的工程应用价值。
[1] 王 怡,赵 菁,文时祥.指针式仪表数据智能采集系统设计[J].电子科技,2011,24(5):73-77.
[2] 李杭生,李 念,崔 丽,等.基于自适应图像识别的指针仪表检定系统[J].微计算机信息,2009,25(2-3):282-284.
[3] 刘 迪,毕笃彦,李权合,等.非均匀光照下指针式仪表自动判读算法设计[J].计算机应用与软件,2013,30(9):47-48.
[4] 丁 婵,温宗周,刘 丹.指针式仪表自动识别装置的设计[J].西安工程大学学报,2011,25(1):78-81.
[5] 江泽涛,王 轼,李克伟.一种指针式仪表非接触测量方法[J].计算机应用与软件,2009,26(4):281-283.
[6] 周勇亮,金 燕,何 萍,等.随机Hough变换圆检测累计加速算法[J].计算机辅助设计与图形学学报,2014,26(4):574-580.
[7] 周 封,杨 超,王晨光,等.基于随机Hough变换的复杂条件下圆检测与数目辨识[J].仪器仪表学报,2013,34(3):622-628.
[8] 宋晓宇,袁 帅,郭寒冰,等.基于自适应阈值区间的广义Hough变换图形识别算法[J].仪器仪表学报,2014,35(5):1109-1117.
[9]OtsuN.Athresholdselectionmethodfromgraylevelhistogram[J].IEEETransactionsonSystemManandCybernetic,1979,9(1):62-66.
[10]KurugolluF,SankurB,HarmaneiAE.Colorimagesegmentationusinghistogrammultithresholdingandfusion[J].JournalofImageandVisionComputing,2001,19(13):915-928.
[11]SauvolaJ,SeppanenT,HaapakoskiS,etal.Adaptivedocumentbinarization[C]//Proceedingsof4thinternationalconferenceondocumentanalysisandrecognition.[s.l.]:[s.n.],1997:147-152.
[12]SinghTR,RoyS,SinghOI.Anewadaptivethresholdingtechniqueinbinarization[J].InternationalJournalofComputerScienceIssues,2011,8(6):271-277.
[13] 胡志勇,张国兴,刘 海,等.用中心投影法作直齿圆锥齿轮的仿真模型[J].机械传动,2010,34(12):23-26.
[14] 张 卡,盛业华,叶 春,等.基于中心投影形状特征的车载移动测量系统交通标志自动识别[J].仪器仪表学报,2010,31(9):2101-2108.
[15] 张艳玲,汪仁煌,宁志刚,等.彩色数字仪表表盘读数的自动识别系统[J].计算机测量与控制,2007,15(4):555-557.
[16] 何林远,毕笃彦,熊 磊,等.基于计算机视觉的座舱仪表识别检测方法[J].中南大学学报:自然科学版,2014,45(5):1469-1475.
A Kind of Automatic Recognition Algorithm for Complex Pointer Instrument
LI Wei,REN Qing-qing,HU Yan-xia,ZHU Shao-jun,XIE Lei-jin
(College of Information Engineering,Chang’an University,Xi’an 710064,China)
For the pointer instrument with complex surface background and liquid filler,in order to get a more accurate reading,a novel and practical reading recognition method based on image processing technology is proposed.Based on this method in the integrated use of adaptive threshold iteration method for image binarization and edge extraction algorithm combined morphological method and the silhouette for image pre-processing,Hough transform circle detection and para space average center detection are adopted to determine the center of the instrument.And the method is adopted to find the pointer angle which is the mean method of bidirectional scanning based on traditional central projection,and the meter reading is calculated by using the angle method.The traditional central projection method and its improved one are compared and verified,and the error of the two methods are compared and analyzed.The experimental results show that the improved algorithm has stable performance,especially for the rotation of the pointer instrument recognition with high accuracy and strong real-time performance.
mid-projection;Hough transformation;pointer instrument
2016-04-22
2016-07-26
时间:2017-02-17
中央高校项目(310824152103)
李 伟(1981-),男,博士,副教授,研究方向为光电数字化成像及检测技术、仪器仪表自动化;任青青(1989-),女,硕士研究生,通讯作者,研究方向为图像处理、仪器仪表自动化。
http://www.cnki.net/kcms/detail/61.1450.TP.20170217.1630.048.html
TP301.6
A
1673-629X(2017)03-0201-04
10.3969/j.issn.1673-629X.2017.03.043
猜你喜欢
小学生学习指导·低年级(2021年6期)2021-09-10
软件学报(2020年6期)2020-09-23
中学生数理化(高中版.高考理化)(2020年2期)2020-04-21
学苑创造·A版(2019年9期)2019-11-07
广东第二课堂·小学(2017年9期)2017-09-28
学苑创造·B版(2017年1期)2017-02-21
学苑创造·B版(2017年1期)2017-02-21
小天使·二年级语数英综合(2016年9期)2016-05-14
物理教学探讨(2014年2期)2014-05-22
软件工程(2014年3期)2014-03-15