物流搬运机械手建模仿真与快速成型
2017-03-27 13:46王玲,朱祥森梁博宇王振峰田辉
物流科技 2017年2期
王++玲,朱祥森+梁博宇+王振峰+田辉


摘 要:文章利用SolidWorks软件对一种3自由度物流搬运机械手进行机构设计与仿真分析,实现虚拟装配和干涉检查。阐述机械手的控制原理和工作过程,编写单片机程序操控机械手的运动。采用快速成型技术对其零部件实现快速加工,实现机械手的快速制作。结果表明:快速成型技术应用于产品的快速设计与制作,可加速产品的研发和上市,实现较大的经济和社会效益,为工业产品的研发从虚拟设计到成品生产的一般过程提出新思路。
关键词:物流搬运机械手;SolidWorks;快速成型技术
Abstract: This paper using SolidWorks for a three degrees of freedom logistics handling manipulator mechanism design and simulation analysis, the realization of virtual assembly and interference checking. Control principle and working process of the manipulator, write single-chip microcomputer program control movement of the manipulator. Using rapid prototyping technology to the parts for rapid processing, realize the rapid production of manipulator. The results showed that the rapid prototyping technology is applied to the rapid design and manufacture of the product, can accelerate product research and development and listing, achieve greater economic and social benefits, a research and development for industrial products from the general process of virtual design to the finished product production put forward new ideas.
Key words: logistics handling manipulator; SolidWorks; rapid prototyping technology
引 言
近年來,3D打印技术在工业产品设计特别是数字制造领域的应用正在成为一种潮流和热门话题[1],它的持续发展、成本的大幅下降使其已经从研发的小空间向主流市场进军,发展势头不可阻挡,已经成为社会广泛关注、民用市场迅速崛起的新领域。
随着近些年国内工业生产的不断发展与进步,机械自动化程度越来越高,依靠机械器具替代人工工作逐渐频繁,工业生产过程中涉及的许多方面人力操作已无法满足要求。
本文在参阅国内外相关研究的基础上,涉及并提出了一种3自由度机械手仿真设计与模型制作。将设计的3自由度机械手做详细论述,包括机械手结构设计与建模、虚拟运动仿真、3D打印制作、控制部分设计与整机调试。
1 物流搬运机械手的设计与建模
机械手主要由执行机构、驱动系统、控制系统所组成。在控制系统的程序控制下,通过驱动机构采用各种不同的传动方式,来实现执行机构的相应部位发出按规定要求的,有顺序,有运动轨迹,来实现执行机构产生有一定速度和时间的动作[1]。根据以上机械手的工作原理,结合预期的设计效果,设计出机械手硬件系统框图如图1所示。
根据本次设计的需要选用了TX-1C 51单片机开发板、MG995舵机和32路舵机控制板[2]。
1.1 一级臂设计
设计由三个舵机独立控制三个不同的动力输入和动作执行,结合目前常见的小型机器人的结构[2],设计出三段式的整体机械结构,分别是底座、一级臂、二级臂、抓手,通过各个舵机来实现设计的功能,在设计结构时,同时也需要考虑3D打印进行的加工特点。
底座设计目前暂时采用比较简易的设计和安装方式,采用最为常见的支撑座形式(如图2所示),这样的整体设计也方便后续将机械手安装到其他设备或者小车等移动设备上,有利于进一步设计和开发。
一级臂的动力来源为底座上安装的一号舵机,用于实现竖直旋转运动,从而带动其他部分进行相应的运动。同时还需要考虑一级臂与底座之间的连接方式,根据电机输出轴特点和综合考虑其他机械设备上面电机、发动机等其他动力源动力输出方式,最终确定为使用法兰盘和螺栓固定的方式使一号舵机的动力传递到一级臂上。在设计一级臂时还需要考虑二级臂的预留位置和安装方式,故一级臂最终设计为对称的U型结构,如图3所示。
1.2 二级臂设计
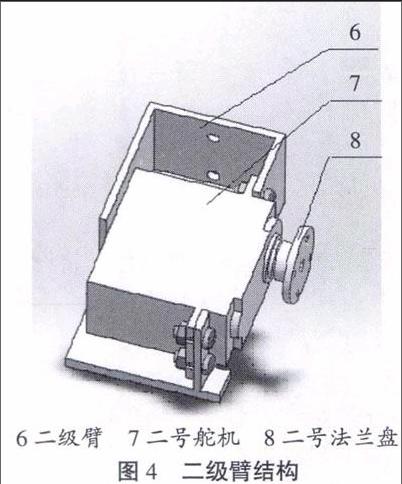
二级臂的设计除需要满足二号舵机的安装及其动力输出转换成二级臂自身的运动外,也需要满足和一级臂、抓手之间的连接安装以及快速成型机加工的条件。从而设计出如图4所示的二级臂结构。
此结构进行悬空设计,适合快速成型机来打印生产;为了实现舵机的安装,二级臂设计成了矩形的框架结构,内部可以安装舵机;为了将二号舵机的动力输出转化成二级臂的运动动力来源,将二号舵机的输出轴设计为二号舵机的旋转轴,不仅使结构紧凑而且增加了美观;二级臂与一级臂的连接问题,采用了一级臂和底座的连接方式,这样的类似结构,增加了通用零件,机构部件之间的通用性也得以提升;二级臂与抓手部分的连接,采用两个L型连接板方式来实现连接。为实现二号舵机的动力输出转换成二级臂自身的运动,采取了将二号舵机的电机轴即动力输出轴设计为二级臂自身的旋转中心,采用如图5所示的连接结构,将以往舵机机体固定舵机轴旋转的方式改为舵机轴固定舵机机体旋转的方式,从而实现了动力转换功能。
1.3 抓手的设计
抓手设计是本次设计中的重要环节和主要创新点。抓手的设计首先需要考虑整体结构,借鉴曲柄滑块机构,经过多次实验建模,最终设计如图6所示:3号舵机输出轴上安装齿轮,通过螺栓和齿轮压板紧固连接,3号舵机输出轴输出的动力传递到齿轮,齿轮与滑块上的齿条相啮合,齿条连带滑块在滑槽内移动,带动曲柄和抓手,从而实现抓手的抓取动作。
1.4 总体结构建模仿真
通过采用三维设计软件,在SolidWorks环境下进行了底座、一级臂、二级臂、抓手等主要部件的建模设计,最终完成了机械手的虚拟装配及运动仿真分析。通过在舵机与爪手约束处添加驱动关系,得到机械手的运动规划,这样可以清楚直观地了解设计结构的运动动态性能,校验了装配和运动过程中的干涉,便于及时发现问题并进行调整和修改,节约了设计时间,降低了经济成本。三维装配图如图7所示。
2 控制部分设计与整机调试
首先运用计算机和与舵机控制板相配套的ServoController软件进行舵机动作的调试和将动作存储到舵机控制板中,再运用51单片机进行C语言程序的编写对舵机控制板中的动作进行调用,通过使用单片机的程序编写软件(Keil uVision2)和程序烧入软件(STC烧写软件—ISP—V6.82E),对需要完成的指令进行编译和调试,最后用計算机连接单片机、舵机控制板、整机进行调试。最终达到电源—单片机—舵机—整机的独立运动的设计要求,可以实现机械手独立从一个位置拿取工件按照程序要求放置到另一位置的实际运用要求。
3 机械手的加工与制作
3D打印是一种以数字模型为基础,运用粉末状金属或非金属材料,通过逐层打印的方式来构造物体空间形态的快速成型技术。由于其在制造工艺方面的创新,被认为是“第三次工业革命的重要生产工具”[3]。它是在计算机的控制下,根据零件的CAD 模型,通过材料的精确堆积制造原型或零件。不需采用传统的加工机床和工具,极大提高了零件的加工效率和制造成本[4]。
根据之前的设计方案和确定的设计参数利用SolidWorks软件三维建模,直接将图形转化为STL格式,导入到本次采用的型号为ALAF I3 DIY的3D打印机相配套的Simplify3D(Stubbs Repack)软件内,调整3D打印机各个参数进行打印,在多次调试打印参数的试验下,确定下各个部件最合适的打印参数,并逐一打印出所设计的各个零件。
最后将打印出来的各个零件,进行包括打磨、钻孔等必要处理,最终加工成能满足装配需要的零件后,使用选择好的螺栓、螺母、螺钉、a-氰基丙烯酸乙酯瞬间胶粘剂等连接方式,将加工好的各个部分组装整机(如图8所示),并进行了必要的机械结构调试。
4 结 论
通过本次对机械手的设计与制作,特别是从零部件到整机的整个设计过程运用SolidWorks虚拟建模技术进行虚拟设计和运动仿真,不仅提高了效率而且节省了成本。还有创新性的运用快速成型技术进行加工制作,为工业产品的研发从虚拟设计到成品生产的一般过程,提出了利用快速成型生产模型,对模型进行论证和改进的新思路,并通过本次研究和使用证明了这种新思路的可行性。
参考文献:
[1] 耶晓东. 基于单片机的简易机械手的设计[J]. 微计算机信息,2009(14):230-231.
[2] 陈林祥,王正初. 基于51单片机的三自由度气动机械手控制系统的设计[J]. 机电产品开发与创新,2015(1):87-88.
[3] Waiters P, Davies K. 3D printing for artists: research and creative practice[J]. Journal of the Norwegian Print Association, 2010(1):12-15.
[4] 朱子愧,高奇,李瑞,等. 基于快速成型技术的仿生机械乌龟设计与制造[J]. 机械,2015(2):56-58.