
220 kV变电站绝缘子带电干冰清洗机器人设计研究
2017-03-23 22:34付金奇韩军杰戴浩林朱昌进
湖北电力 2017年2期
付金奇,韩军杰,戴浩林,赵 昊,杜 君,朱昌进
(1.中国电力建设股份有限公司装备事业部,北京 100048;2.武汉电力设备厂,湖北 武汉 430061)
0 引言
随着经济的发展,电网容量和输电电压等级相应提高,同时随着工农业的发展,部分地区环境污染日趋严重,在雾霾、凝露、毛毛雨等不利气象条件下,污秽绝缘子极易发生闪络,给国民经济发展带来巨大的经济损失[1]-[4]。20世纪90年代以来,我国电网防污闪研究工作取得了大幅进展:制定了一系列防污闪管理规定和技术政策,通过调整输电设备爬距、开发应用RTV防污涂料等方法来减少污闪现象的发生,但污闪事故仍然时有发生。污闪事故轻则造成线路、变电站跳闸、停电,严重时会造成导线落地、电网解列、大面积大范围灾害性停电[5]。因此清除绝缘子表面的污秽物,对于防止绝缘子发生污闪事故,保障电力系统的稳定性安全运行具有重要意义。
目前,绝缘子带电清扫的方式主要有以下几种:带电水冲洗、带电气吹洗、带电化学清洗和带电机械干清扫等方法,但这些方法在不同程度上还存在一些不足[6]-[8]。基于这种情况,武汉电力设备厂研制了一种用于220 kV变电站带电环境下的干冰清洗机器人。
干冰清洗技术是将液态二氧化碳通过干冰制备机制成干冰颗粒或干冰方块,将干冰颗粒或方块通过喷射清洗机与压缩空气混合喷射到被清洗物体表面,利用固体干冰颗粒或细粉高速运动产生的冲击力,结合干冰本身的低温特性以及升华所产生的热力膨胀,使被清洗表面的结垢、油污、残留杂质迅速被剥离清除,不会对被清洗物体特别是金属表面造成任何伤害,由于其清洗效果好,并具有绝缘特性,非常适合于变电站绝缘子的清洗[9]-[12]。本文所研究的干冰清洗机器人基于干冰清洗技术,并设计了一套自动化装置能够实现变电站绝缘子的带电清洗。
1 机器人的基本构造
1.1 总体结构及性能技术指标
干冰清洗机器人总体结构如下图所示,机器人采用可自行走的履带底盘,便于通过变电站内砾石路面。

图1 干冰清洗机器人结构组成Fig.1 The structure of Dry ice blast cleaning Robot
干冰清洗装置的主要技术指标如表1所示:

表1 干冰清洗装置主要技术指标Tab.1 The main Technical indicators of Dry ice blast cleaning Robot
1.2 机械系统
带电干冰清洗机器人的机械系统主要包含底盘、绝缘升降装置、绝缘水平伸缩装置、绝缘直线滑轨、绝缘齿圈装置。履带底盘实现了清洗机器人在变电站环境下的自由行走;升降装置满足了机器人清洗不同高度绝缘子的要求;水平伸缩装置增大了机器人的清洗范围,可实现一次定位,清洗多个绝缘子;绝缘直线滑轨简化了绝缘子的清洗流程,使用时只要滑轨对准,即可实现绝缘子的清洗;绝缘齿圈带动干冰喷嘴对绝缘子进行360°的清洗。
1.3 液压系统
带电干冰清洗机器人包含两套液压系统,其中一套液压系统采用柴油发动机驱动,主要用于机器人的行走、支腿调平,其所采用的液压油为常规的抗磨液压油。另一套液压系统为绝缘液压系统,所采用的液压油为10号变压器油。此液压系统主要用于控制剪叉机构升降,回转台回转、伸缩臂伸缩、绝缘滑轨俯仰、左右摆动,及机械手腕的上下运动。为保证绝缘部件的绝缘效果,在变压器油箱内设置了磁性颗粒过滤器,能过滤变压器油中可能存在的铁质磁性颗粒,保证变压器油的绝缘效果。
1.4 气动系统
由于该带电干冰清洗机器人的大部分执行机构布置于升降平台上,而控制系统布置于履带底盘上,控制装置与执行机构之间需要通过绝缘管道连接,若全部采用液压执行机构控制会带来执行机构重量相对较重、液压管道直径大、数量多,不利于绝缘管道的布置,在这种情况下,部分执行机构采用了气动元件推动,启动元件具有重量轻,上机管道管径小,有利于机构的布置。并且采用气动系统能充分利用干冰喷射回路的冷干压缩空气,不用额外增加空气压缩设备。
1.5 电控系统
清洗机的控制系统主要采用人—机结合、手动—自动兼备、清洗过程全自动的控制方式。考虑到现场使用环境的复杂性和高压带电环境的高度安全可靠性,在控制系统中采用了高精度、高可靠性的传感元件和远距离无线蓝牙传输技术,实现非接触式检测、识别目标物和远距离遥控操作。为了实现智能控制和结构紧凑的目的,采用了PLC系统来集中控制,从而使系统具备程序和逻辑控制功能并布局紧凑。控制系统从功能划分来讲总体可以分为以下5个部分:(1)现场信号、位置采集、检测系统;(2)点对点无线传输系统;(3)PLC控制系统;(4)遥控操作及指示、报警系统;(5)无线图像监控系统,其控制原理如图2所示。
1.6 上位机操控系统
干冰清洗机装置采用一台触摸式平板电脑实现与设备的无线遥控操作,操作员能够使用手指触碰屏幕上的按钮来选择功能界面及操控设备动作。

图2 无线控制原理Fig.2 Theory of wireless control
该系统功能主要分为3大部分:一是设备操作按钮,二是信号实时显示,三是故障诊断及记录。图3为人机界面的功能图,操作人员能够通过功能管理界面选择需要的功能,设备信号显示能够以3D立体图形显示设备运行状况。用户能够通过设备操作按钮向设备发出动作指令。设备的实时故障及历史故障记录在故障诊断及记录界面里。

图3 人机界面系统功能图Fig.3 HMI system Function diagram
干冰清洗机器人部分上位机操作画面如图4所示。
2 关键技术问题及解决方法
2.1 主体升降机构的设计
由于设备工作高度为2 m-8 m,并且为保证设备的安全高度,设备收回时最高高度不超过2.5 m。在设计阶段,分别设计了多级油缸伸缩起升、剪叉起升等方案,通过综合方案对比选择了剪叉升降方案,该方案具有一个稳固的顶部作业平台,便于将小型干冰机、伸缩装置布置于作业平台上。

图4 干冰清洗机器人操作画面Fig.4 Dry ice blast cleaning Robot operating diagram
2.2 绝缘材料的选择
机器人要求实现带电清洗,则其主体设备必须满足带电作业的绝缘要求。绝缘要求主要有以下几点:(1)在变电站内行走设备非绝缘结构高度不超过2.5 m;(2)工作时爬电绝缘距离不小于6 m;(3)为防止高压电弧对机器人放电,机器人工作端必须采用绝缘材料。为同时满足零部件的机械使用性能和绝缘性能是材料选择的一个难点。为此,干冰清洗车大量地采用了绝缘材料,其中主体结构受力较大的部件采用玻纤增强型环氧树脂。受力较小的部件采用了聚甲醛、尼龙66等材料。干冰清洗系统的喷嘴组件、回转装置均采用绝缘材料制作,同时对前端部分金属件采用了圆弧型的屏蔽罩进行屏蔽,防止尖端放电。
2.3 绝缘伸缩臂的设计
伸缩臂的水平伸缩必须采用绝缘结构,以保证设备的绝缘距离。伸缩臂采用二级伸缩方式,伸缩臂分两级伸出,绝缘臂的伸出采用液压油缸驱动,为保证整体的绝缘性不被降低,在设计中采用了绝缘液压缸。绝缘伸缩臂的结构如图5所示:
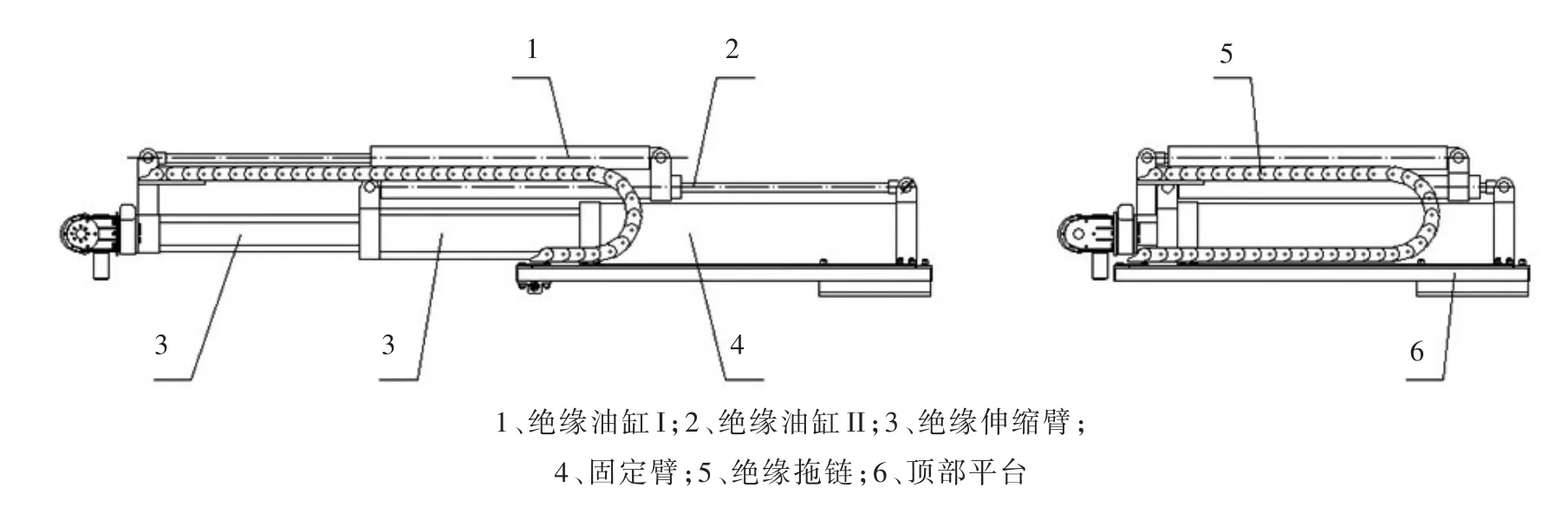
图5 绝缘伸缩臂结构Fig.5 The structure of Insulated telescopic arm
绝缘油缸的材料经过了多次论证,初期分别提出了环氧树脂增强玻纤、陶瓷等材料,但存在以下问题:环氧树脂油缸制作精度不易保证,并且活塞杆伸出缩回过程中易产生磨粒[13]。陶瓷油缸存在成本过高问题。最终选择采用POM材料制作油缸,在缸筒制作过程中,发生了缸筒脆裂现象,后改用进口的材料问题得以解决。经过后续的油缸测试及整机测试,油液工作压力达到6 MPa,油液采用黏度为10 cst变压器油的工况下,整体使用性能良好,能够完成相应的动作,但在活塞杆与周围会发生渗油现象。分析其原因在于绝缘材料的活塞杆只能采用车削加工,不能采用磨削加工,故活塞杆表面加工精度不易达到密封要求。
2.4 直线滑轨的制作
为避免设备整体上下运动造成设备的晃动,本带电干冰清洗机器人采用了直线滑轨式的设计。工作时,只需将绝缘滑轨与支柱绝缘子对准,然后机械手腕沿着绝缘滑轨做直线运动,不需要剪叉机构做整体的升降运动,可以降低设备工作时的抖动,增强工作时的可靠性。此外使用直线滑轨便于清洗各种角度的绝缘子,只需在使用前将绝缘滑轨与绝缘子轴线对准,之后升降机构即可锁定,只驱动机械手腕沿滑轨做上下的直线运动,同时机械手腕自身做回转运动,即可完成绝缘子自上而下的清洗。这种运动方式避免了目前国内其他研究机构制造的清洗装置由于清洗需要整体升降机构运动而造成设备晃动大的问题[14]。另外,由于直线滑轨装置固定于一个多自由度的回转支承上,因而理论上能够调整滑轨到任何角度,可以实现倾斜绝缘子的清洗,如变压器套管,拓宽了设备的应用范围。
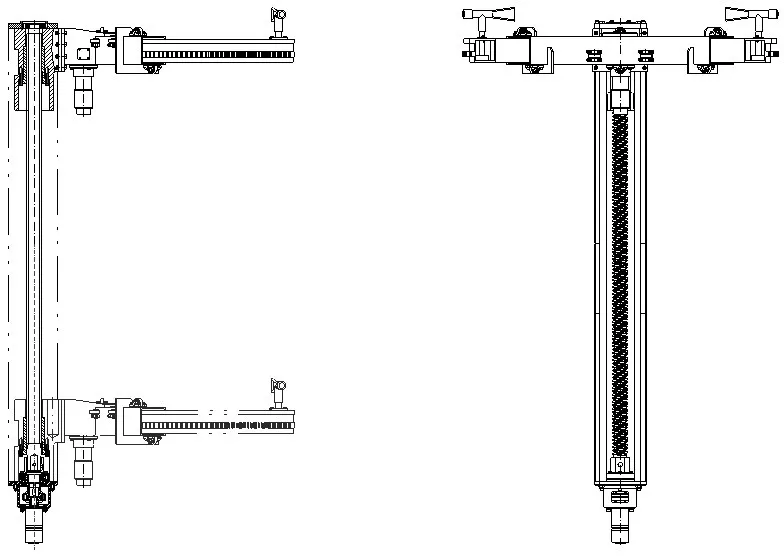
图6 直线滑轨的结构Fig.6 The structure of a linear slide
由于清洗设备是利用干燥的压缩空气携带干冰颗粒冲击绝缘子表面来实现清洗效果,因而干冰颗粒须具备一定的动能。干冰在常温下易发生气
2.5 干冰清洗效果保障
化,若干冰管道输送距离过长的话,干冰颗粒外形尺寸逐渐减小,当到达喷嘴并从喷嘴中喷出时,干冰颗粒已经完全气化无法实现清洗功能。为此,采用小型轻质材料制作的干冰机,并将其布置于升降平台上方跟随升降平台一起上升,减小高度落差保证干冰颗粒在喷嘴出口处具有足够的动能。并且,干冰机布置于平台上还有利于减小干冰输送管道的长度,保证了从喷嘴喷出干冰颗粒的粒度,使干冰颗粒的清洗效果不发生衰减。
3 机器人的性能测试
3.1 电磁兼容实验
电磁兼容实验主要是对设备所采用的通讯方式及电子元器件进行检验,以确保控制设备在变电站环境下运行的可靠性。在电磁兼容测试下分别进行了:静电放电抗扰度、射频电磁场敷设抗扰度、电快速瞬变脉冲群抗扰度、浪涌抗扰度、射频磁场感应的传导骚扰抗扰度、工频磁场抗扰度、脉冲磁场抗扰度、阻尼振荡磁场抗扰度、电压暂降抗扰度、传导骚扰、敷设骚扰的测试。电控设备在上述各种干扰下均能够正常工作。
带电干冰清洗机器人控制系统的电磁兼容实验结果如表2所示。

表2 干冰清洗机器人电磁兼容实验结果Tab.2 Electromagnetic Compatibility Experiment Results of Dry ice blast cleaning Robot
3.2 整机泄露电流及工频耐压实验
按文献[15,16]的相关要求,分别对机器人在8 m工作状态和4 m工作状态进行了测试(如图7),测试电压为450 kV/min,实验结果如表3所示。

图7 整机的泄露电流和耐压实验Fig.7 Leakage current and frequency withstand voltage test of the equipment

表3 泄漏电流及工频耐压实验结果Tab.3 Leakage current and frequency withstand voltage test results
3.3 变电站带电清洗实验
设备通过了电磁兼容实验及泄漏电流和耐压实验后,进行了各种环境下的现场带电作业实验。干冰清洗机器人分别进行了东莞某110 kV变电站的干冰清洗作业、汉南地区某220 kV变电站干冰清洗作业、韶关某220 kV变电站电流互感器清洗实验、某实训基地的变压器套管的带电清洗实验。
为了拓宽设备的清洗范围,机器人的干冰喷嘴采用了可拆卸式设计,当需要人工清洗变电站变压器风扇等其他附属设施时,只需将干冰喷嘴从机械手腕上拆下,由人工手持对变压器风扇等设备进行清洗,如图10所示:

图8 110/220 kV支柱绝缘子清洗实验Fig.8 110/220 kV Pillar Insulator Cleaning Experiment

图9 电流互感器和变压器套管的清洗实验Fig.9 Cleaning test of current transformer and transformer casing

图10 变压器风扇清洗实验Fig.10 Cleaning test transformer’s fan
4 结论
(1)本文介绍的干冰清洗机器人首次采用了非接触清洗方式,避免了之前某些设备采用接触式清洗所带来的主体设备晃动问题。
(2)该机器人采用了绝缘直线滑轨的清洗方式,并且滑轨可做左右及俯仰运动,因而能够适应各种角度的绝缘子的清洗,极大地拓宽了带电干冰作业清洗车的应用范围。此外,由于其采用的是干冰喷射清洗技术,在干冰清洗车收缩到位后,可由人工手持干冰喷枪对变电站内的其他设备,如变压器风扇等设备的清洗,可以实现一机多用。
(3)本项目所采用的绝缘液压缸为双作用式液压缸,制作简单,成本低,成功地解决了绝缘环境下的水平伸缩机构的制作难题。该绝缘液压缸在多个高压带电的环境下进行了作业测试,均能可靠地完成指定动作,满足了设备的使用要求。同时该技术也可推广到其他行业加以应用。
(4)机器人采用了干冰机上置方案,避免了干冰颗粒在管道内的长距离输送,有效地保证了干冰的清洗效果。
(5)本文所采用的光纤传感器可靠地保证了带电环境下的绝缘要求。
(6)此干冰清洗设备的整体绝缘结构符合220 kV变电站使用要求,整体绝缘性能良好,耐压实验及泄露电流实验合格,表明该设备的绝缘结构设计合理,能为其他带电作业设备提供参考借鉴。
(7)此设备采用遥控操作,表明在变电站环境下通过WIFI及无线蓝牙技术进行信号传输是可靠的。
(8)经过多次对变电站的清洗实验,也暴露了样机的一些缺陷,其主要问题是结构过大,如何将结构轻型化、小型化是下一步研究的方向。
(References)
[1] 张志劲,蒋兴良,孙才新.污秽绝缘子闪络特性研究现状及展望[J].电网技术,2006,30(2):35-40.Zhang Zhijin,Jiang Xingliang,Sun Caixin,Present situation and prospectofresearch on flashover characteristics ofpolluted insulators[J].Power Sys⁃tem Technology,2006,30(2):35-40.
[2] 宿志一.防止大面积污闪的根本出路是提高电网的基本外绝缘水平[J].中国电力,2003,36(12):57-61.Su ZhiYi.To intensify basic external insulation level of power system-fundamental way for prevention of large-scale pollution flashover[J].Electric Power,2003,36(12):57-61.
[3] 刘兆林.1996年来华东电网雾闪事故分析与对策[J].电网技术,1997,21(8):63-68.Liu Zhaolin.Analysis of fog flashover faults in east China power system at the end of 1996 and its countermeasures[J].Power System Technology,1997,21(8):63-68.
[4] 钱之银,张铭,肖嵘.华东电网500kV线路历年污闪事故分析及外绝缘配置优化研究[J].电网技术,2007,31(19):37-51.Qian Zhyin,Zhang Ming,Xiao Rong,Analysis on pol⁃lution flashover accidents in 500 kV transmission lines of east China power grid over the years and research on optimal configuration of external insula⁃tion[J].Power System Technology,2007,31(19):37-51.
[5] 关志成,王绍武,梁曦东等.我国电力系统绝缘子污闪事故及其对策[J].高电压技术,2000,26(6):37-39.Guan Zhicheng,Wang Shaowu,Liang Xidong,Wang Linming,Fan Ju.Application and prospect of poly⁃meric outdoor insulation in China[J].High Voltage Engineering,2000,26(6):37-39.
[6] 张晋,汲胜昌,曹涛等.电力设备带电清扫技术的现状及展望[J].绝缘材料,2009,42(2):63-66.Zhang Jin,Ji Shengchang,Cao Tao,Ou Xiaobo,Wang Zhilong.Present and prospect of power equipment's electriferous cleaning technique[J].Insulating Mate⁃rials,2009,42(2):63-66.
[7] 蒋琨.电力设备的带电化学清洗[J].高电压技术,2001,27(3):53-54.Jiang Kun.Living chemical cleaning of electrical equip⁃ment[J].HighVoltageEngineering,2001,27(3):53-54.
[8] 王志龙,张晋,李荣立等.电气设备带电水蒸汽清洗技术[J].绝缘材料,2009,42(3):69-72.Wang Zhilong,Zhang Jin,LiRongli,Ji Shengchang.Technique of cleaning by water vapor for live power equipment[J].Insulating Materials,2009,42(3):69-72.
[9] 史金海,赵庆良,路安.干冰冷喷射清洗技术及其应用[J].哈尔滨商业大学学报(自然科学版),2005,21(5):588-591.Shi Jinhai,Zhao Qingliang,Lu An.Study on cleaning technique of dry ice and application[J].Jouranal of Harbbin Uniwersity of Commerce(Natural Sciences Edition),2005,21(5):588-591.
[10] 左华.二氧化碳干冰清洗技术综述[J].低温与特气,2005,23(2):12-15.Zuo Hua.Summarization of Dry Ice purge technology[J].Low Temperature and Specialty Gases,2005,23(2):12-15.
[11] Sherman Robert,Hirt Drew,Vane Ronald.Surface cleaning with the carbon dioxide snow jet[J].IEEE Trans on Vacuum Science&Technology,1994,12(4):1876-1881.
[12] Spur G,Uhlmann E,Elbing F.Dry-ice blasting for cleaning:Process,optimization and application[A].International Conference on Erosive and Abrasive Wear(ICEAW)[C],1999,v233-235,p:402-411.
[13] 陈晓伦,彭夕岚,杨汝清等.330 kV变电设备带电清扫机器人研究[J].电网技术,2007.10:56-59.Chen Xiaolun,Peng Xilan,Yang Ruqing,Li Shi-wei,Weng Xinhua,Zhu Jian-jun,Ge Yongxiang.Study on development of live line cleaning robot for 330 kV transformation equipments[J].Power System Technol⁃ogy,2007.10:56-59.
[14] 顾毅,杨汝清,宋涛等.关节式带电清扫机器人的绝缘性及安全性设计[J].机器人,2006.3:149-153.Gu Yi,Yang Ruqing,Song Tao,Che Lixin.Safety and insulation design of articulated hot-line cleaning robot[J].Robot,2006,3:149-153.
[15] 国家质量技术监督局.GB/T 18037-2008带电作业工具基本技术要求与设计导则[S].北京:中国标准出版社,2008.The State Bureau of Quality and Technical Super⁃vision.GB/T18037-2008 TechnicalRequirements and Design Guide for Live Working Tools[S].Beijing:Standards Press of China,2008.
[16] 国家质量技术监督局.DL/T878—2004带电作业用绝缘工具实验导则.[S].北京:中国电力出版社,2004.The State Bureau of Quality and Technical Super⁃vision.DL/T878-2004 Test Guide of The Insulat⁃ing Tool for Live Working[S].Beijing:China Elec⁃tric Power Press,2004.
猜你喜欢
计算技术与自动化(2022年1期)2022-04-15
学与玩(2021年5期)2021-07-30
散文诗(青年版)(2021年5期)2021-07-11
中国设备工程(2019年12期)2019-08-05
设备管理与维修(2019年10期)2019-02-16
电子制作(2018年17期)2018-09-28
兵器装备工程学报(2018年7期)2018-07-31
汽车零部件(2017年6期)2017-07-25
小雪花·成长指南(2017年5期)2017-06-07
通信电源技术(2016年6期)2016-04-20
