基于OpenGL的播种机机械部件离散元法仿真分析
2017-03-16 10:47殷玥
农机化研究 2017年11期
殷 玥
(南阳理工学院 软件学院,河南 南阳 473000)
基于OpenGL的播种机机械部件离散元法仿真分析
殷 玥
(南阳理工学院 软件学院,河南 南阳 473000)
为了提高播种机机械部件仿真的可靠性,克服传统几何仿真的局限性,提出了一种基于OpenGL建模和离散元仿真软件的播种机零部件虚拟设计方法,并以播种机开沟器和排种盘的实验和仿真验证了其可靠性。设计了播种机部件、土壤和种子的离散元建模方法,并设置了仿真模拟参数,通过实验测试了开沟器的力学性能和排种器的漏播率与重播率,最后将其和离散元仿真结果进行了对比。对比结果表明:利用离散元仿真模拟方法与实验测试得到的阻力、漏播率和重播率的结果基本吻合,从而验证了其在播种机部件设计优化中使用的可行性,为播种机部件的优化提供了一种新的设计方法。
OpenGL建模;离散元仿真;播种机部件;虚拟设计;重播率
0 引言
播种机机械部件的虚拟仿真设计是一种在虚拟数字化设计制造过程中,不直接使用真实设计制造系统情况下,对产品的性能进行测试,从而使开发设计人员及时地了解产品的设计缺陷,对机械部件进行优化的方法。其有效地缩短了设计开发的周期,降低了设计成本,提高了播种机零部件的设计质量。几何仿真方法只是对播种机零部件的建模和移动及装配情况进行分析,不能虚拟出播种机真实的工作环境;而离散元方法可以通过参数化设计,虚拟出播种机的真实作业环境,包括开沟和排种等一系列作业过程,且这种方法直观形象,利于理解。利用Open GL图形库,运用参数化离散建模法可以构造播种机性能测试的环境,利用仿真计算结果,可以分析播种机机械零部件的性能,将其应用在播种机的优化设计过程中具有重要的现实意义。
1 基于Open GL的播种机建模仿真原理
Open GL 是一种开放性的图形库,利用该图形库可以进行播种机机械部件、种子和土壤等模型的计算机绘图和建模,该平台是与硬件无关的接口,可以在
不同的软件平台上使用。Open GL不仅能够制作出高质量的三维彩色图像,还能够创建高质量的动画效果,且可以将建立的模型应用到离散元分析软件中,做进一步的分析研究。其建模原理如图1所示。

图1 播种机械部件Open GL建模基本原理
在进行播种机械部件、种子及土壤的三维建模时,首先需要建立模型的几何顶点,然后通过运算器对顶点数据进行图像组合,通过图像的纹理映射和光栅化操作,最终得到和实体模型非常接近的三维虚拟模型。目前,利用Open GL技术和离散元软件可以模拟出颗粒或者非球形物体等物体和农机的接触,得到需要的结果文件,为播种机的设计提供可靠的数据参考。其具体流程如图2所示。
软件在运行时可以利用设计开发的人机交互界面设置模型的计算参数,根据仿真计算迭代时间和迭代步数,完成整个接触过程的仿真模拟。在没完成所有计算时步之前,需要不断地生成需要计算的颗粒,然后通过接触计算得到颗粒的合力,从而更新颗粒的具体位置,这为播种机的设计提供了较大的便利。

图2 三维离散元法计算流程图
2 播种机机械部件、种子及土壤等离散元虚拟仿真参数选取
土壤的成分比较复杂,颗粒之间存在凝聚力,因此在进行土壤建模时需要考虑粘结接触模型,利用该模型可以将两个颗粒粘结在一起,承受一定的切向力和法向力,当达到临界切向或者法向力时,颗粒之间的粘性力被完全破坏后,颗粒可以看作刚性颗粒球体来进行计算。假设粘结力为,其力矩形式为,随着时步的增加而增加,其表达式为
(1)
其中,vn、vt表示土壤的法向和切向速度;A表示颗粒接触的面积;δt表示时间步长;Sn、St表示刚度在法向和切向的数值;wn、wt表示土壤的法向和切向角速度;RB表示土壤颗粒的粘结半径。当超过应力的临界值之后,粘结作业会被破坏,其表达式为
(2)
在进行离散元仿真分析时,接触力学模型选择好之后,其参数的设置非常重要,参数的选择对仿真模拟的结果起决定性作用,特别是时间步长、刚度系数和阻尼系数等的选择。
1)时间步长的选择。时间步长的选择与颗粒之间的碰撞和总接触数目相关,在保证计算精度和收敛性的情况下,可以适当地调整时间步长,以降低计算时间。其临界值的大小主要同系统中研究对象的最大刚度和最小质量有关,表达式为
(3)
其中,λ表示保险系数;kmax表示待仿真模拟系统的最大刚度系数;mmin表示待仿真模拟系统的最小质量。由式(2)可以看出:刚度系数的大小与时间步长的大小有关,当刚度系数增加时,时间步长的取值应该当减小。
2)刚度系数的选择。由式(2)已知,刚度系数的选取和时间步长的关系非常密切,如果按照播种机机械部件、种子和土壤的实际刚度来进行仿真模拟计算,则其时间步长太小,计算时间会过长。为了节省计算时间,在保证计算精度的前提下,可以适当缩小计算刚度,并观察刚度的取值对计算精度的影响情况,从而保证计算的可靠性,节省计算时间。
3)阻尼系数的选择。利用实验方法可以测得播种机种子的法向刚度系数,而种子之间的法向刚度系数可以用公式(4)进行计算,则
(4)
种子的切向刚度系数可以利用公式ks=λkn来计算,于是可以得到法向阻尼cn和切向阻尼cs的系数为
(5)
(6)
其中,m0=m1m2/(m1+m2),m1、m2分别表示接触的两种颗粒的质量,当边界和颗粒进行接触时,m0的值为零。
4)其它参数选择。在进行仿真模拟计算时,还有其他待选择的计算参数,如动摩擦因数、静摩擦因数及颗粒密度等,这些可以根据实验值来进行设置,具体参数的选取如表1所示。

表1 离散元仿真模拟基本参数设置
在完成仿真参数的设置之后,便可以在离散元软件中对播种机机械部件的性能进行仿真模拟测试,得到相应的测试结果,从而为机械部件的优化提供数据支持。
3 基于OpenGL离散元的播种机部件仿真
为了简化种子和土壤的离散元建模过程,本次建模主要将种子和土壤简化为两种模型,一种是单圆球形的,一种是双圆球形的,颗粒直径进行适当的放大,其结构如图3所示。
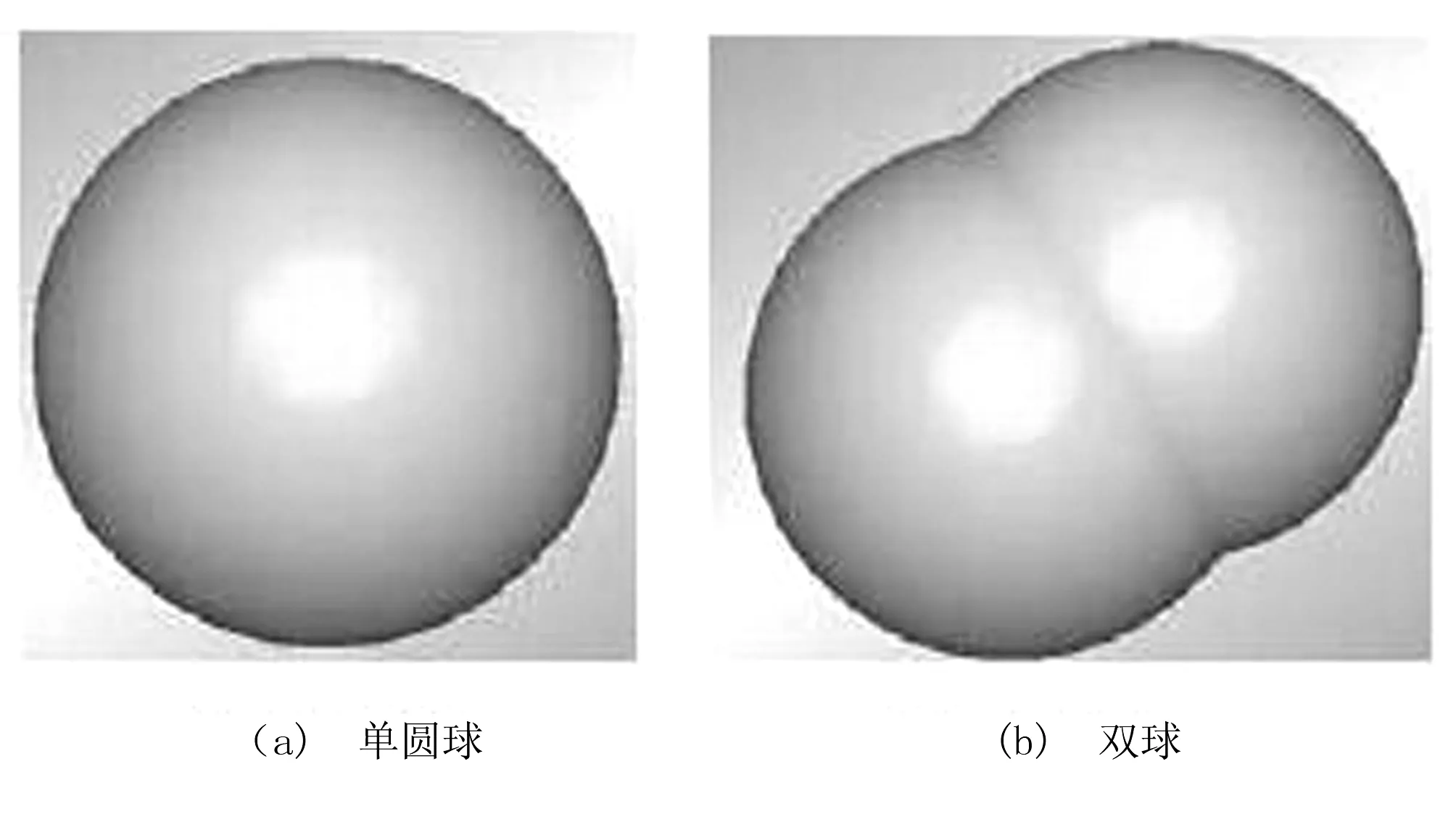
图 3 土壤颗粒离散元模型
在仿真分析时,颗粒的直径设置为随机生成,并将直径的生成值设置为实测基础值的1~1.5倍,首先利用离散元仿真软件测试播种机的机械部件开沟器的性能。
如图4所示,利用OpenGL建立了开沟器和土槽的三维实体模型,并利用模型兼容性接口将其导入到了EDEM离散元仿真软件中,通过仿真模拟计算,得到了如表2所示的仿真模拟结果。
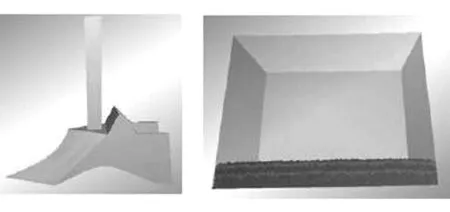
图4 开沟器和土槽模型

开沟器行进速度/m·s-1水平阻力实验值/N模拟值/N垂直阻力实验值/N模拟值/N0.212.211.88.98.50.422.322.113.813.20.635.135.825.124.90.842.842.332.832.51.052.352.645.643.2
从表2中可以看出:通过实验和仿真模拟得到的开沟器水平阻力和垂直阻力的实验结果基本吻合,误差主要是由于土壤颗粒设置的比实测颗粒偏大, 从而验证了利用离散元方法对播种机机械部件进行仿真模拟的可行性。
图5为播种机排种器的离散元仿真模拟。为了使种子能够均匀的下落,使用搅拌装置对种子进行搅拌,在初始状态时,种子的运动速度分布不均匀,经过一段时间后,其仿真结果如图6所示。

图5 排种器种子搅拌过程仿真结果
由图6可以看出:经过搅拌后,种子的运动速度分布开始逐渐变得均匀,对排种盘的种子下落过程的仿真模拟进行截图,如图7所示。

图6 不同时刻种子运动状态仿真结果

图7 播种机排种盘仿真截图
利用离散元可以得到排种盘内种子的运动过程和下落过程,并可以对种子的下落质量进行统计,通过仿真计算,得到了如表3所示的统计结果。
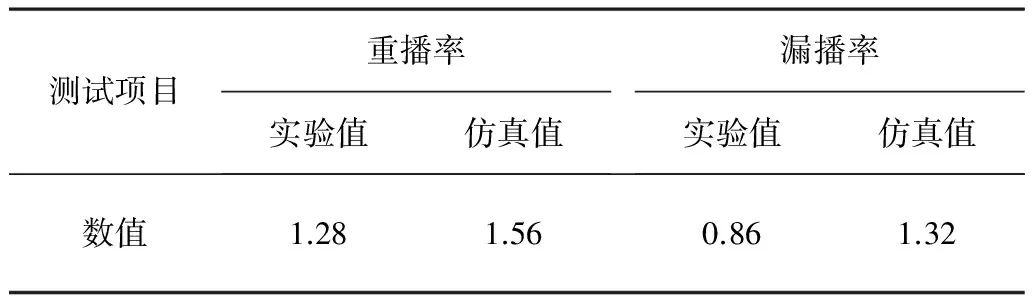
表3 重播率和空穴率仿真结果
本次实验和模拟的种子对象是吉峰218,由实验和仿真的对比结果发现:由实验得到的重播率和漏播率结果和模拟值相吻合,进一步验证了离散元方法在播种机机械部件仿真模拟中使用的可靠性。
4 结论
基于OpenGL建模和离散元仿真软件,提出了一种新的基于虚拟仿真的播种机机械部件的优化设计方法,并将其使用在了播种机开沟器和播种器的优化设计过程中,得到了良好的设计效果。利用OpenGL软件建立了播种机开沟器和排种器的仿真模型,建立了种子和土壤的模型,并以播种机真实的作业环境为依据设置了仿真参数,通过仿真计算得到了一系列的计算结果。将计算结果和实验结果进行对比发现,由实验测试和仿真模拟得到的阻力、重播率和漏播率结果基本吻合,从而验证了离散元仿真在播种机机械部件优化设计中使用的可行性,可以将其推广到其他农机部件设计中使用。
[1] 接鑫, 李晓峰,孙亮,等.种子玉米机械脱粒最佳施力方式试验[J]. 农业机械学报, 2009, 40(12): 71-75.
[2] 李心平,马福丽,高连兴.差速式玉米种子脱粒机的设计[J]. 农业机械学报, 2008,39(8): 192-195.
[3] 李静梅, 张岐, 王军锋.多核处理器并行计算模型研究[J].智能计算机与应用, 2011(3): 9-12.
[4] 郭文洋.精密播种机开沟器的设计与试验研究[J].农机化研究,2014,36 (1):160-163.
[5] 张晓辉,赵百通.播种机自动补播式监控系统的研究[J].农业工程学报,2008,24(7):119-123.
[6] 韩建国,王金斌,于磊.补偿式玉米精密播种机的研究[J].农业装备与车辆工程,2010(8):10-12.
[7] 周利明,王书茂,张小超,等.基于电容信号的玉米播种机排种性能监测系统[J].农业工程学报,2012, 28(13):16-21.
[8] 李建江,崔健,王聃,等.MapReduce 并行编程模型研究综述[J]. 电子学报,2011,39(11):2635-2642.
[9] 高春城.我国农业发展的资源环境问题与展望[J].当代生态农业,2013,3(4):151-154.
[10] 庄卫东,汪春.农业直线行走作业DGPS导航算法研究[J].黑龙江八一农垦大学学报,2006,18(6):94-98.
[11] 张智刚,罗锡文.久保田插秧机的GPS导航控制系统设计[J].农业机械学报,2006,37(7):96-97.
[12] 周建军,张漫,汪懋华.基于模糊控制的农用车辆路线跟踪[J].农业机械学报,2009,40(4):152-156.
[13] 曾桂根,吴霜.基于嵌入式Linux的3G接入方案的设计与实现[J].计算机技术与发展,2010,20(9): 193-196.
[14] 万宝瑞.当前我国农业发展的趋势与建议[J].农业经济问题,2014,4(1):110-114.
[15] 徐茂,邓蓉.国内外设施农业发展比较[J].北京农学院学报,2014,29(2):75-79.
[16] 赵其国.当前我国农业发展中存在的深层次问题及对策[J].生态环境学报,2013,22(6):911-915.
[17] 于建群,钱立彬,于文静,等.开沟器工作阻力的离散元法仿真分析[J].农业机械学报,2009,40 (6):53-57.
[18] 王俊,张伏,毛鹏军,等.基于虚拟仪器技术的六分力测试系统设计[J].传感器与微系统,2009,27(12): 67-69.
[19] 王忠森,张伟,车刚.基于虚拟仪器的双圆盘开沟器检测技术的研究[J].农机化研究,2009,31(3): 104-106.
[20] 张锐,李建桥,周长海,等.推土板表面形态对土壤动态行为影响的离散元模拟[J].农业工程学报,2007, 23(9):13-19.
[21] 陈幼平,度艾莉,周敬东,等.虚拟制造环境下数控机床的运动学建模与仿真[J].计算机工程与应用,2005(10):175-178.
[22] 王东,杨溢.大型离散元软件EDEM的功能特点[J].科技成果纵横,2009(3): 75-76.
[23] 于建群,申燕芳,牛序堂,等.组合内窝孔精密排种器清种过程的离散元法仿真分析[J].农业工程学报,2008, 24(5): 105-109.
[24] 付宏,乌兰,黄万风,等.基于图元的三维离散元法边界建模方法[J].计算机集成制造系统,2008,14(12): 2328-2333.
[25] 金衡模,高焕文.玉米精播机漏播补偿系统设计[J].农业机械学报,2002,33(5):44-47.
Simulation and Analysis of Mechanical Components of Seeding Machine Based on Discrete Element Method and OpenGL
Yin Yue
(School of Software, Nanyang Institute of Technology, Nanyang 473000, China)
In order to improve the reliability of mechanical components sowing machine simulation, overcome the limitations of traditional geometric simulation,it proposes a design method of virtual parts seeder OpenGL modeling and simulation software based on discrete element.Then the seeding machine mechanical parts opener and seeding experiments and simulation verified its reliability.The discrete element modeling method to design components, soil and seed sowing machine, and set the simulation parameters,test the mechanical properties of the opener and the metering device of the leakage sowing rate and replay rate,finally the discrete element simulation results and comparison.By comparing the results obtained by the simulation method and experimental test of discrete element simulation of resistance, leakage sowing rate and replay rate results, which verifies the feasibility of its use in parts of seeding machine design optimization,which provides a new design method for the optimization of the mechanical components of the seeder.
OpenGL modeling; discrete element simulation; seeding machine parts; virtual design; replay rate
2016-09-18
河南省科技攻关项目(152102110161)
殷 玥(1982-),女,河南南阳人,讲师,硕士,(E-mail)ars1982@163.com。
S223.2;TH122
A
1003-188X(2017)11-0030-05
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
成都信息工程大学学报(2021年5期)2021-12-30
农业技术与装备(2021年3期)2021-12-01
今日农业(2020年22期)2020-12-14
中国惯性技术学报(2020年2期)2020-07-24
农机化研究(2019年1期)2019-12-21
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
农机化研究(2018年8期)2018-07-10
中国农业文摘-农业工程(2016年5期)2016-04-12