新型锐角开沟器的设计及数值模拟
2017-03-16 10:47:52赵淑红谭贺文张先民刘宏俊曹秀振杨悦乾
农机化研究 2017年11期
赵淑红,谭贺文,张先民,刘宏俊,曹秀振,杨悦乾
(东北农业大学 工程学院, 哈尔滨 150030)
新型锐角开沟器的设计及数值模拟
赵淑红,谭贺文,张先民,刘宏俊,曹秀振,杨悦乾
(东北农业大学 工程学院, 哈尔滨 150030)
针对锐角开沟器土壤扰动大的问题,根据旗鱼头部轮廓曲线设计了3种新型锐角开沟器(仿生旗鱼型、圆弧型和斜线型开沟器)。选择土壤含水率(12±1)%、2种开沟深度(30、90 mm),利用离散元法(DEM)对3种开沟器的工作阻力和土壤扰动进行仿真分析,并进行土槽试验。试验与仿真结果对比表明:各项误差值均在合理范围内,验证了EDEM软件模拟开沟器作业的可行性和准确性。最后选定在开沟深度60mm时,3种类型开沟器、3种土壤含水率为因素进行9种工况下的仿真分析。结果表明:在一定深度情况下,3种开沟器的工作阻力均随含水率的增加而增大;而在含水率变化的情况下,开沟器对土壤扰动(扰动宽度、回土深度)变化不明显。仿生旗鱼型开沟器所受工作阻力和对土壤扰动最小。通过离散元仿真和试验分析,为开沟器的设计提供一种可行的方法,并可为开沟器的设计与优化提供理论依据。
开沟器;离散元;土壤扰动;仿真
0 引言
开沟器[1-2]是播种机的关键部件,按其入土角不同可分为钝角开沟器和锐角开沟器。钝角开沟器具有代表性的有圆盘式和滑刀式开沟器:圆盘式开沟器应用广泛,土壤扰动小,但其需要足够配重才能入土[3-4],对播种机质量有很大要求[5];滑刀式开沟器的设计和制造存在较大的随意性,导致在使用中发生入土性差和易堵塞等问题[6]。锐角开沟器入土性能好、开沟阻力小,但自身存在土壤扰动较大、不利于保墒等一些问题。
研究者们针对锐角开沟器做了大量研究,赵淑红等[7]设计了鸭嘴式开沟器,有利于解决寒地冬小麦免耕播种机开沟器易缠草、不易入土及堵塞等问题。赵启新等[8]为满足具有足够的入土能力、分草作用和良好的通过性,保证机具作业时不挂草、不壅堵等要求设计了凿尖圆胸式开沟器。苟文等[9]针对西南丘陵地区保护性耕作模式下小麦免耕播种机尖角型开沟器易缠草、堵塞及使用寿命短等问题,设计了圆弧刃口型开沟器。
近年来,研究者基于离散元法(DEM)对土壤与耕作机具间的作用过程进行了广泛研究[10-11]。同时,利用离散元法(DEM)进行仿真模拟土壤和开沟器之间的相互作用。于建群等[12]建立了芯铧式开沟器和播种施肥开沟器与土壤颗粒的二维离散元法分析模型, 采用离散元法研究开沟器的工作过程及工作阻力,通过改变开沟器的CAD模型和土壤颗粒参数,分析不同条件下开沟器的工作阻力。Ucgul等[13]分别针对无粘性土壤、粘性土壤采用不同的离散元接触模型并进行了对开沟过程的离散元仿真,验证了离散元模型的可行性。潘世强[14]运用三维离散元软件EDEM对芯铧式开沟器的工作阻力进行了仿真与分析,并与试验结果进行了对比,通过改进修正离散元模型,优化设计了滑刀式开沟器。综上所述,研究者们针对开沟器工作阻力进行仿真研究,而对于土壤扰动情况缺乏系统研究。
本文参照旗鱼头部流线形状,采用分段曲线拟合原理设计出3种锐角开沟器,即仿生旗鱼型、圆弧型和斜线型开沟器;借助离散元法(DEM)来研究3种开沟器对土壤颗粒在耕作过程中的受力和扰动情况进行仿真分析,并进行室内土槽试验,进一步验证仿生旗鱼型开沟器及圆弧型和斜线型开沟器的合理性,为其优化和设计提供可行性的理论依据。
1 新型锐角开沟器的设计
锐角开沟器由柱体和入土部分组成,如图1所示。柱体为30mm×50mm的空心矩形,长度为500mm,并兼有导种管的作用。入土部分是开沟器的关键部分,本文根据旗鱼头部轮廓曲线设计出仿生旗鱼型、圆弧型和斜线型开沟器。
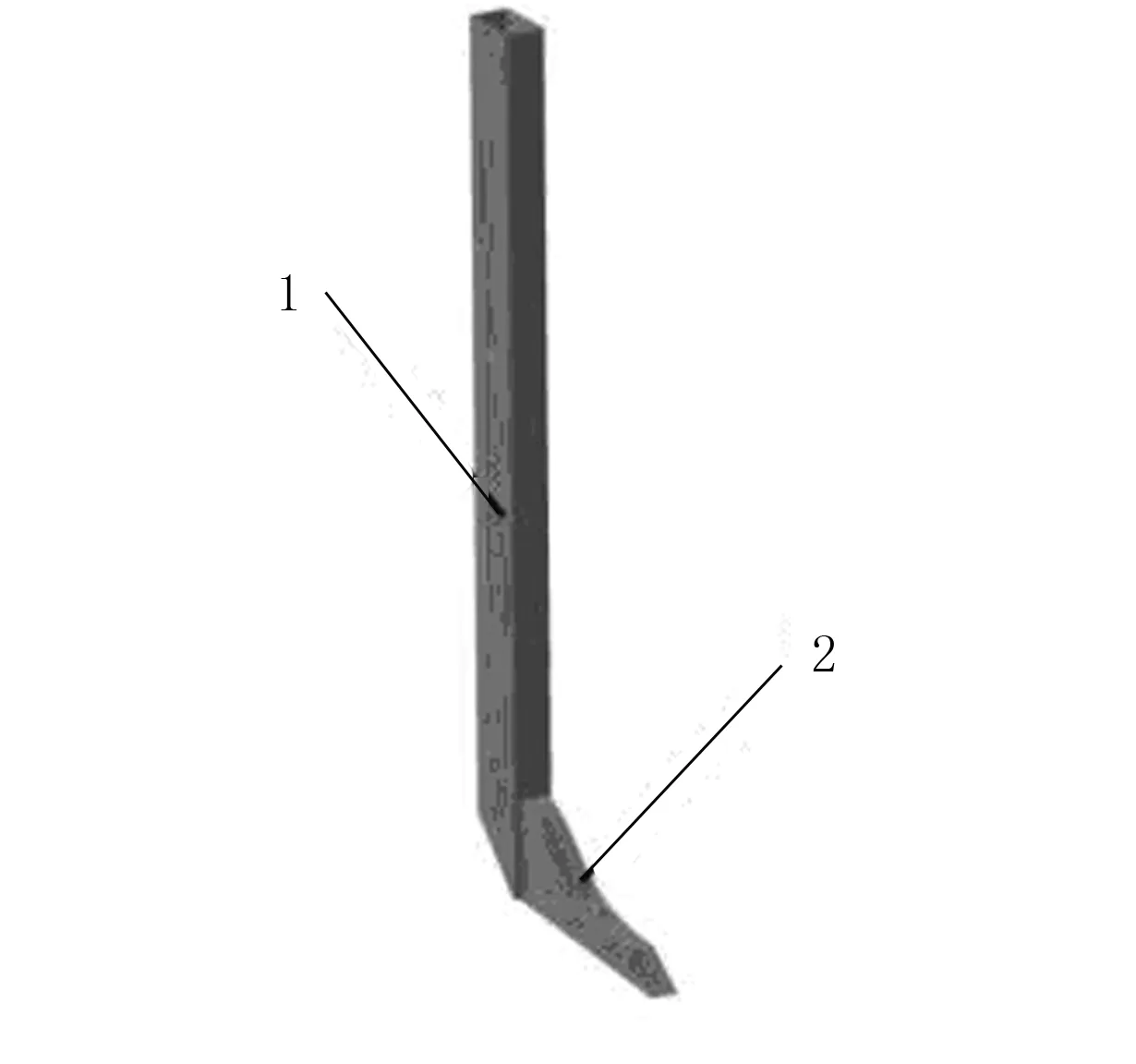
1.柱体 2.入土部分
1.1 仿生旗鱼型开沟器
旗鱼,外形略扁,呈流线型,是海洋中游速最快的鱼类之一。参照旗鱼模型,利用三维软件中的二维制图功能获取旗鱼头部轮廓曲线。利用分段多项式曲线拟合原理对其相对位置坐标点进行数学分析[15]。
在选取分段点时,为保证分段后相邻曲线连接点连续,采用每相邻4个点(最后一段为3个点)依次拟合的形式获取的轮廓曲线如图2所示。旗鱼头部轮廓曲线共8段、24个坐标点,如表1所示。设每段二次曲线的拟合方程为
y=ax2+bx+c
(1)
式中x—某个分段点的横坐标;
y—某个分段点的纵坐标。
由旗鱼头部8段轮廓曲线拟合出来的8个方程如表2所示。从分段曲线拟合方程中可以看出,回归系数R2都大于0.99,拟合程度较高,为开沟器的设计提供了可靠的数学模型。根据农艺要求,参考文献[7],选定开沟器入土角α=30°,入土隙角β=6°;开沟器入土部分地面长度l1=175mm,其入土部分与开沟器铲柄接触的端面顶端距离地面高度h=91mm,前尖入土部分长度l2=50mm,开沟入土部分的宽度d=20mm,且根据轮廓曲线拟合方程加工出仿生旗鱼型开沟器。图3所示为仿生旗鱼型开沟器入土部分示意图。
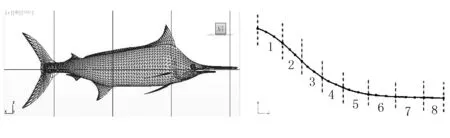
(a) 旗鱼 (b) 轮廓分段曲线图
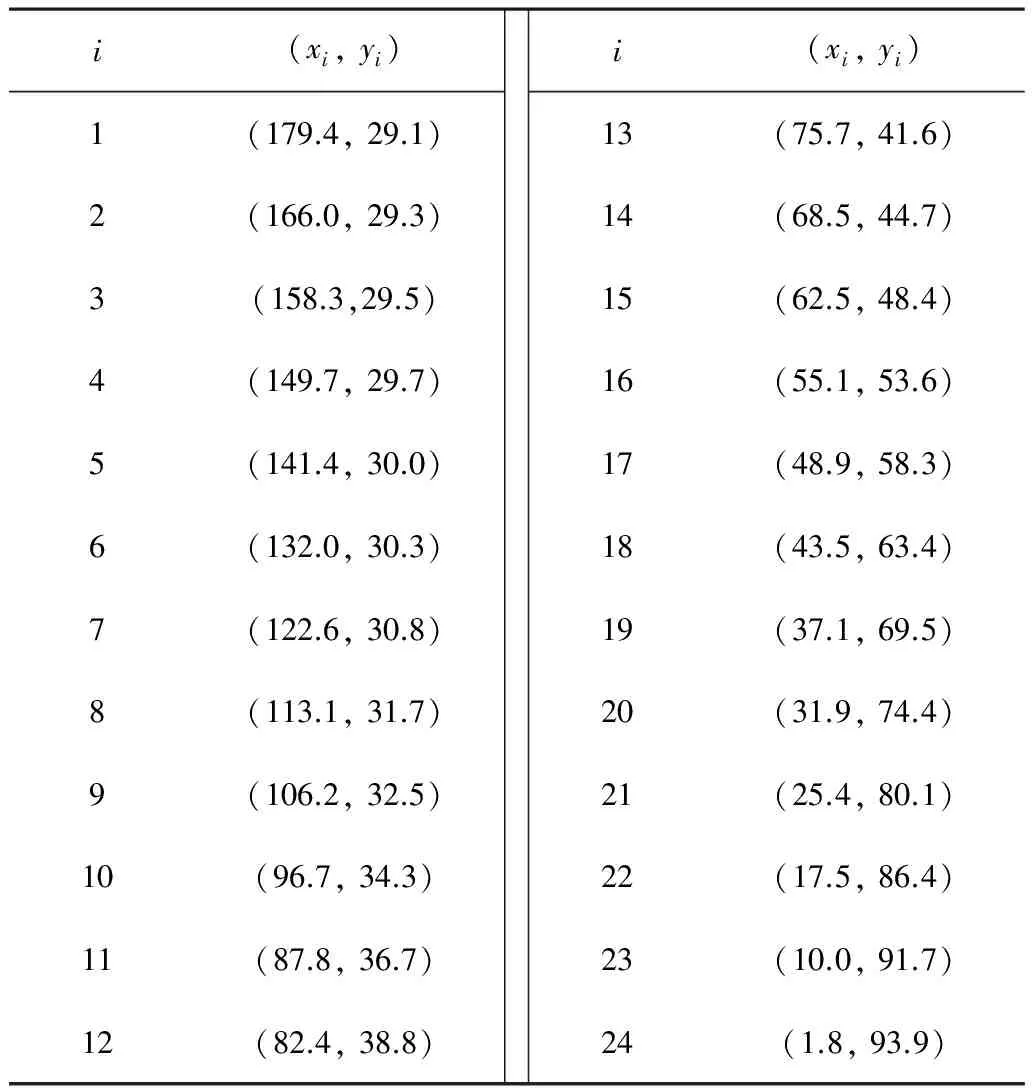
i(xi,yi)i(xi,yi)1(179.4,29.1)2(166.0,29.3)3(158.3,29.5)4(149.7,29.7)5(141.4,30.0)6(132.0,30.3)7(122.6,30.8)8(113.1,31.7)9(106.2,32.5)10(96.7,34.3)11(87.8,36.7)12(82.4,38.8)13(75.7,41.6)14(68.5,44.7)15(62.5,48.4)16(55.1,53.6)17(48.9,58.3)18(43.5,63.4)19(37.1,69.5)20(31.9,74.4)21(25.4,80.1)22(17.5,86.4)23(10.0,91.7)24(1.8,93.9)

表2 拟合曲线方程
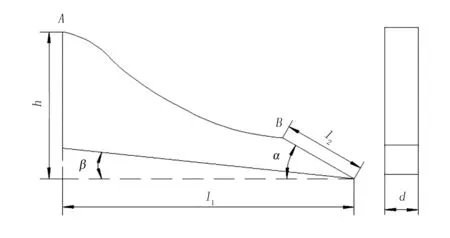
图3 仿生旗鱼型开沟器入土部分示意图
1.2 圆弧型开沟器
对式(1)求导,得
y′=2ax+b
(2)
y″=2a
(3)
曲率半径公式为
(4)
将式(2)、式(3)带入式(4),求得每段曲线的曲率半径为
(5)
由式(5)根据表1和表2计算出每段曲线连接点处的曲率半径,如表3所示。由表3可知:仿生旗鱼型开沟器的轮廓曲线在不同段的曲率半径各不相同,曲线的弯曲程度也不相同。分别以这9个点的曲率半径值为半径画圆弧交于仿生旗鱼型开沟器的A、B两点。如若AB间圆弧过小,圆弧趋近于直线;若圆弧过大,则与开沟器底面的距离过小,无法满足强度要求,作业时容易断裂。因此,取适宜的曲线半径值ρ=126mm,设计出圆弧型开沟器。圆弧型开沟器参数α、β、l1、h、l2、d与仿生旗鱼型开沟器相同,如图4(a)所示。
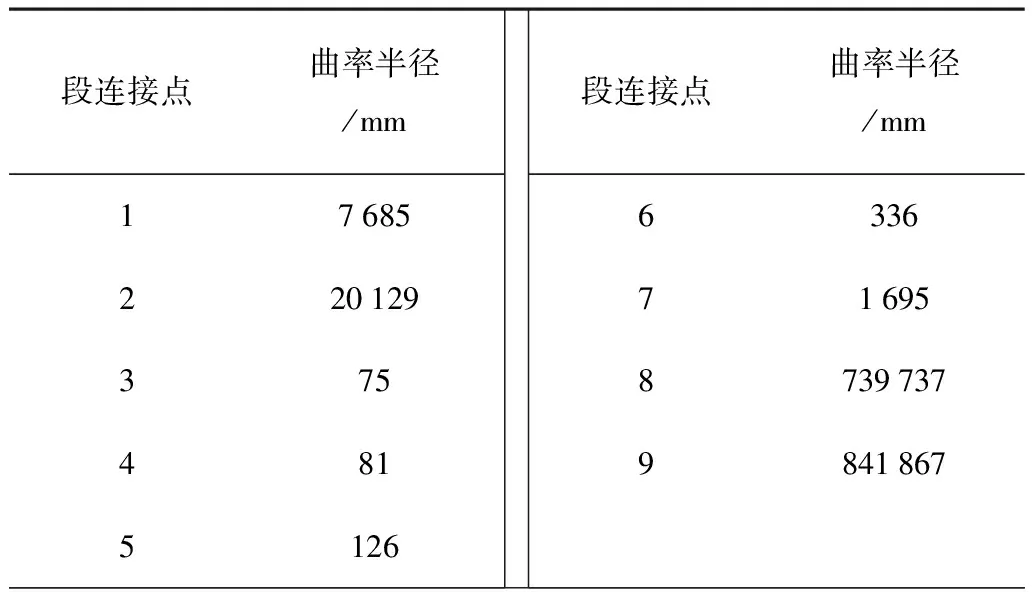
表3 拟合曲线曲率半径
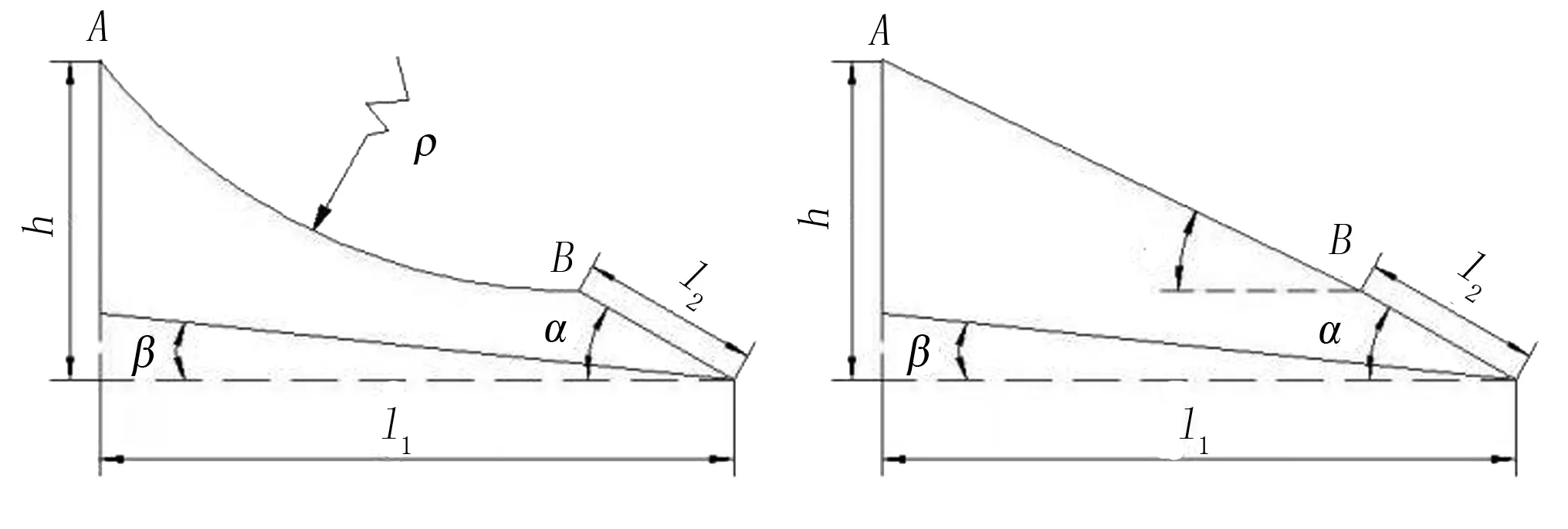
(a) 圆弧型 (b) 斜线型
1.3 斜线型开沟器
将仿生旗鱼型开沟器进行简化,把该开沟器铲尖端点与端面端点相连,即将图3中A、B点相连得出斜线型开沟器(见图4(b)),其参数α、β、l1、h、l2、d均与前两种开沟器相同,θ是斜线AB与水平面的夹角。由几何关系计算得斜线AB的斜率k= tanθ= -0.37。
2 土壤颗粒离散元模型建立
开沟器与耕层土壤的相互运动十分复杂,以东北农业大学工程学院土槽内的土壤为研究对象,对开沟器工作时受到的工作阻力及对土壤的扰动情况进行仿真分析。根据实际土壤情况,选取3种土壤含水率,即(12±1)%、(16±1)%、(20±1)%。为确保仿真的可行性与真实性,结合试验地实际情况建立土壤模型[16]:①选用Hertz-Mindlin模型分析模拟土壤颗粒的接触力的力学模型;②选用Hertz-Mindlin以及粘结接触模型作为土壤颗粒间接触力学模型。
运用土壤物理学及土壤力学理论,通过模拟土壤的堆积、直接剪切试验确定离散元土壤模型的参数,如表4所示。在仿真时,用不同含水率的土壤参数分别对土槽建模,采用EDEM的颗粒工厂生成土壤颗粒集合体。选取的颗粒粒径大小为2~5 mm,颗粒数量为100 000个。在重力的作用下,颗粒生成完成后,再在颗粒上方加载校准土壤密度时施加的垂直载荷,压实土壤模型,最后得到长×宽×高为700mm×300mm×130mm土壤模型。
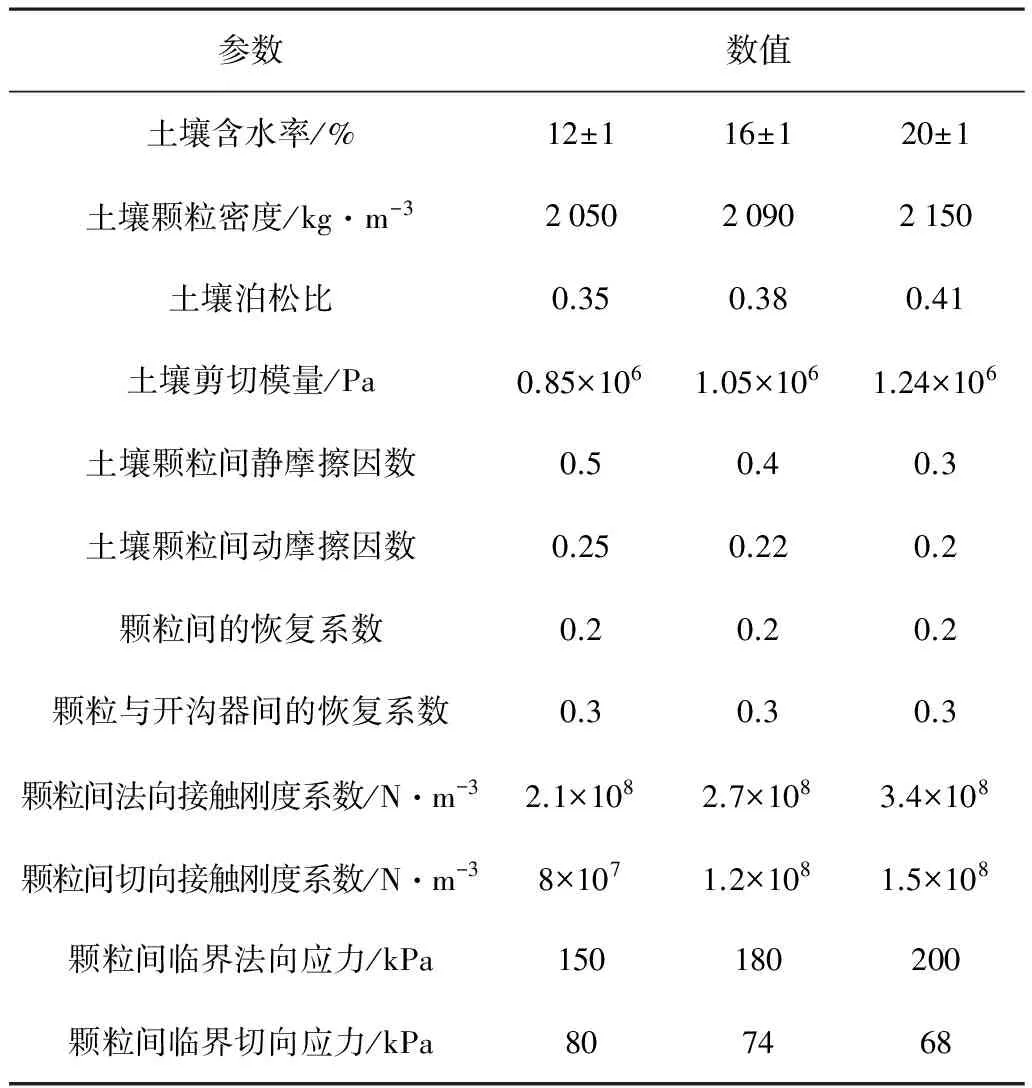
表4 离散元法仿真微观参数表
3 仿真结果与分析
以仿生旗鱼型、圆弧型和斜线型开沟器为研究对象,借助离散元EDEM软件对3种开沟器的两种工作状态进行仿真。工作状态1:土壤含水率为(12±1)%、开沟深度为30 mm;工作状态2:土壤含水率为(12±1)%、开沟深度为90 mm。
3.1 开沟器类型对工作阻力的影响
3种类型开沟器在2种工作状态下进行仿真模拟,数值如表5表示。由表5可知:工作状态1仿生旗鱼型开沟器所受水平阻力为19.7N、垂直阻力为9.37N;工作状态2所受水平阻力为74.6N、垂直阻力为26.9N。圆弧型和斜线型开沟器所受水平阻力均大于仿生旗鱼型开沟器。
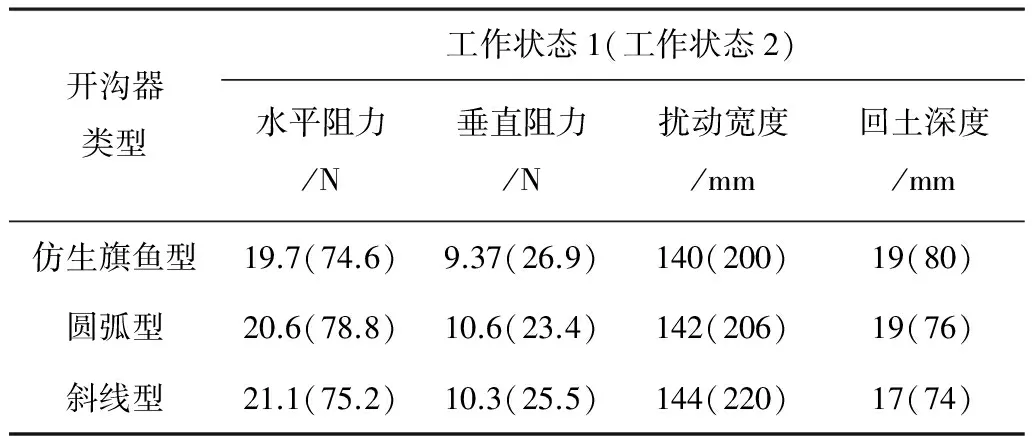
表5 两种工作状态下的仿真结果
3.2 开沟器类型对土壤扰动的影响
在测量沟形参数时,由于仿真的土壤模型颗粒比实际土壤颗粒要大,故选取沟形关键参数为扰动宽度b和回土深度h,如图5所示。对3种开沟器在所选工作状态工作时模拟出的沟形测量结果如表5所示。在工作状态1,仿生旗鱼型开沟器土壤扰动宽度最小(140mm),回土深度最好(19mm);斜线型开沟器土壤扰动宽度最大(144mm),回土深度最差(17mm)。仿生旗鱼开沟器土壤扰动小于圆弧型和斜线型开沟器。工作状态2下,3种开沟器土壤扰动趋势与工作状态1相同。
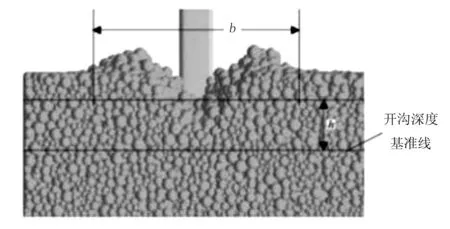
图5 模拟的开沟沟形与形状参数
3.3 仿真结果与试验结果的对比
为验证3种开沟器在2种工作状态下仿真的准确性,于2015年12月,在东北农业大学工程学院室内土槽进行试验。试验台由试验台车、试验台架、传动系统、测力系统和开沟器组成,如图6所示。试验台车动力由变频柜控制电动机提供,主要仪器设备:欧瑞传动变频器(型号F1000-G055T3C)、三相异步电动机(型号Y2-10L2-4)。试验台车工作速度选为0.5m/s。
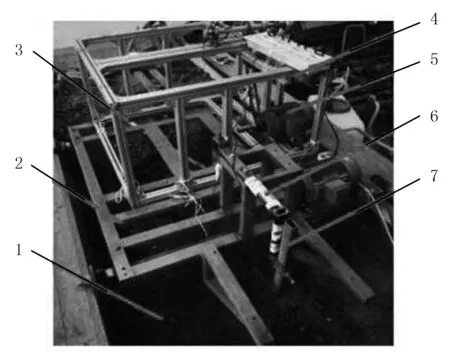
1.土槽 2.试验台车 3.试验台架 4.应力—扭矩测量仪 5.传动装置 6.开沟器连接架 7.开沟器
经过土槽试验得出实验值,3种开沟器在工作状态1(2)所受水平阻力与垂直阻力、开沟器作业时的沟形参数如表6所示。将试验值与仿真值进行对比,两种工况下开沟器所受工作阻力误差最小值为23.8%(6.9%),对土壤扰动宽度误差最小值为43.3%(37.1%),回土深度误差最小值15.2%(0.9%)。由于仿真用到的土壤颗粒粒径较大,开沟器对于土壤扰动宽度的仿真值要小于试验值,故二者误差值较大,但土壤扰动宽度的仿真和试验结果具有相同的变化趋势,仍然具有参考性。
通过3种开沟器在2种工作状态下作业时工作阻力、土壤扰动性的仿真结果与试验结果的对比,可证明离散元EDEM软件模拟开沟器实际作业的可行性与可靠性。
4 影响工作阻力和土壤扰动的因素讨论
为进一步研究开沟器类型、土壤含水率和开沟深度对工作阻力和土壤扰动的影响,选择2种因素对9种工作状态进行仿真分析,在开沟深度为60mm情况下结果如表6、表7所示。
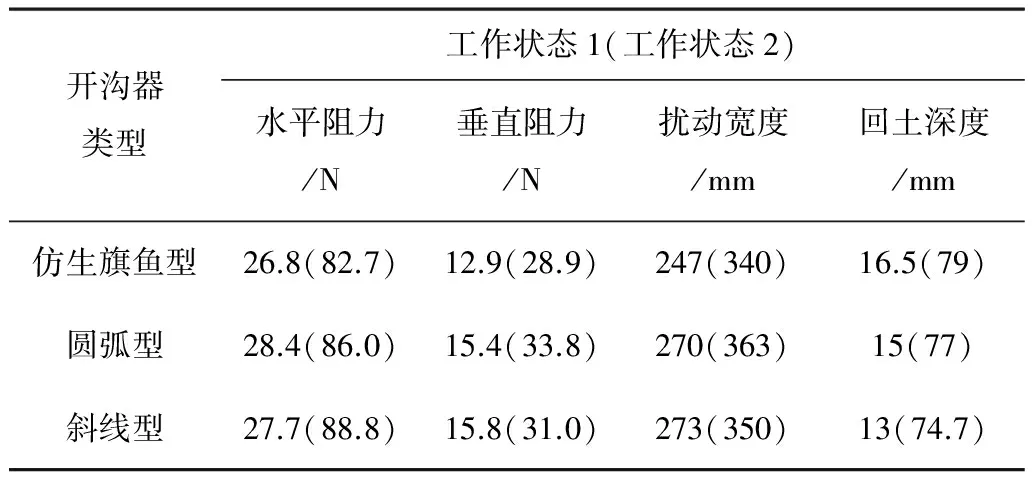
表6 两种工作状态下的试验结果
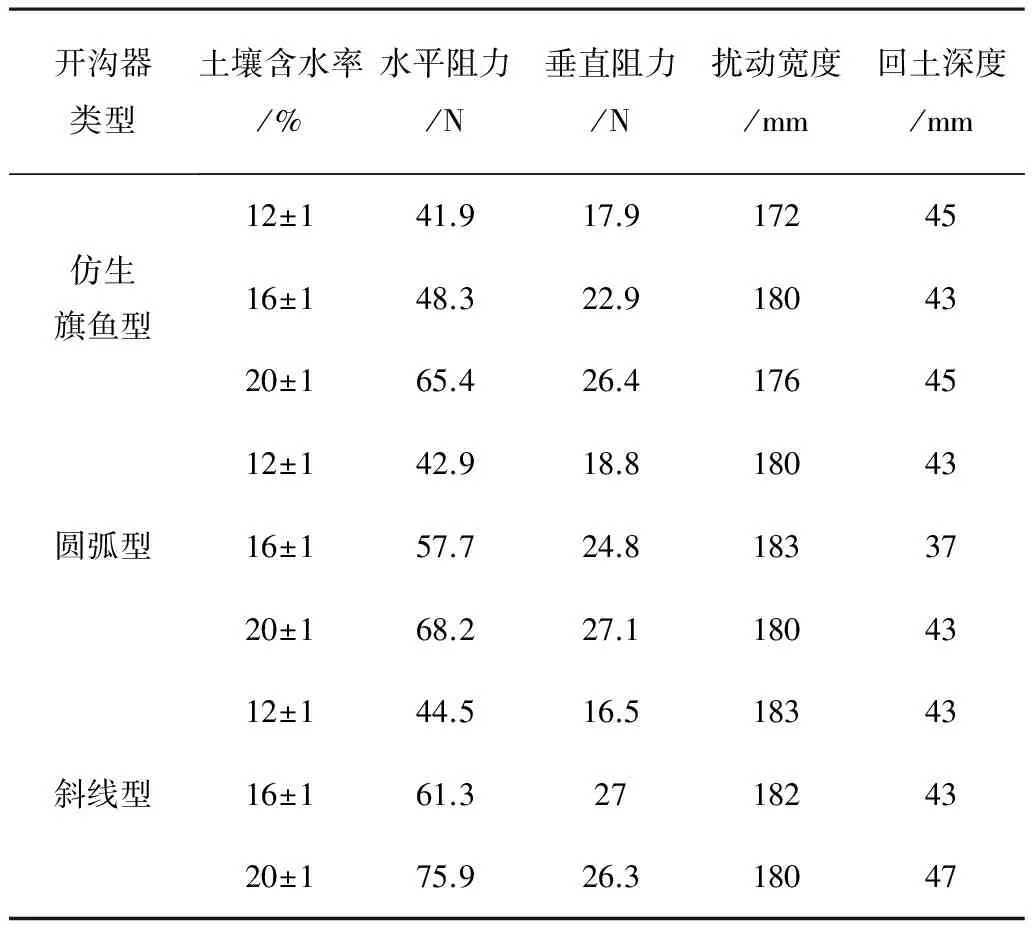
表7 各因素与工作阻力和土壤扰动关系
由表7可看出:在一定深度情况下,3种开沟器的工作阻力均随含水率的增加而增大;而在含水率变化的情况下,开沟器对土壤扰动(扰动宽度、回土深度)变化不明显。在一定含水率和深度情况下,仿生旗鱼型开沟器所受水平阻力和扰动宽度均小于圆弧型和斜线型开沟器。回土深度基本变化不大。
由表5、表7可看出:在(12±1)%含水率下,3种类型开沟器水平阻力和垂直阻力随着深度的增加而增加,扰动宽度和回土深度也随着深度的增加而增加。
综上所述,仿生旗鱼型开沟器阻力小、土壤扰动小,满足锐角开沟器的设计要求,可作为设计新型开沟器的理论依据。
5 结论
根据旗鱼头部轮廓曲线设计出仿生旗鱼型锐角开沟器,并在其基础上进一步设计出圆弧型和斜线型开沟器。通过试验与仿真对比得出:在工作状态1(2):土壤含水率为(12±1)%、开沟深度为30mm(90mm)时,3种开沟器(仿生旗鱼型、圆弧型、斜线型)所受工作阻力的误差最小值为:23.8%(6.9%);土壤扰动宽度误差最小值为43.3%(37.1%),对回土深度误差最小值为15.2%(0.9%),各项误差值均在合理范围内,验证了EDEM软件模拟开沟器实际作业的可行性和准确性。最后,选择2种因素对9种工作状态进行仿真分析,结果表明:在一定深度情况下,3种开沟器的工作阻力均随含水率的增加而增大;而在含水率变化的情况下,开沟器对土壤扰动(扰动宽度、回土深度)变化不明显。通过试验与仿真可知:仿生旗鱼型开沟器阻力小、土壤扰动小,满足锐角开沟器的设计要求,可为设计新型开沟器提供理论依据。
[1] 姚宗路,高焕文,李洪文,等. 不同结构免耕开沟器对土壤阻力的影响[J]. 农机化研究, 2009,31(7):30-34.
[2] 万其号,布库,李岩,等.大型免耕播种机开沟器结构研究[J]. 农机化研究,2012,34(3):45-48.
[3] 林静,李宝筏,李宏哲.阿基米德螺线型破茬开沟和切拨防堵装置的设计与试验[J].农业工程学报,2015,31(17):10-19.
[4] 朱瑞祥,李成鑫,程阳,等. 被动式圆盘刀作业性能优化试验[J]. 农业工程学报, 2014,30(18):47-54.
[5] MURRAY J R, Tullberg J N, Basnet B B. Planters and their components [M].Canberra Australian Centre for International Agricultural Research, 2006.
[6] 顾耀全,贾洪雷,郭慧,等. 滑刀式开沟器设计与试验[J].农业机械学报,2013,44(2):38-42.
[7] 赵淑红,杨悦乾,闫以勋,等. 鸭嘴式开沟器的设计试验[J].东北农业大学学报,2013,44(11):113-117.
[8] 赵启新,张培增,张建中.2BGM-3型覆盖免耕播种机的研制和试验[J].农业机械学报,2000,31(2):118-120.
[9] 苟文,马荣朝,杨文钰,等.小麦免耕播种机开沟器的设计[J].农业工程学报,2012,28(增刊1):21-25.
[10] 方会敏,姬长英,Farman Ali Chandio. 基于离散单元法的旋耕过程土壤运动行为分析[J].农业机械学报,2016,47(3):22-28.
[11] JIANG M J,Yu H S,Harris D. Discrete element modeling of deep penetration in granular soils[J]. Numerical and analytical methods geomechanics,2006,30(4):271-305.
[12] 于建群,钱立彬,于文静,等.开沟器工作阻力的离散元法仿真分析[J]. 农业机械学报,2009,40(6):53-57.
[13] UCGUL M, John M F, Chris S. 3D DEM tillage simulation: validation of a hysteretic spring (plastic) contact model for a tool operation in a cohesionless soil [J].Soil &Tillage Research, 2014,144: 220-227.
[14] 潘世强. 基于离散元法的芯铧式开沟器优化设计试验研究[D]. 长春:吉林大学,2015.
[15] 刘霞,王运锋. 基于最小二乘法的自动分段多项式曲线拟合方法研究[J]. 科学技术与工程,2014,14(3):55-58.
[16] 曹秀振. 基于离散元法的免耕播种机开沟器的设计与试验[D].哈尔滨:东北农业大学,2016.
ID:1003-188X(2017)11-0044-EA Design and Numerical Simulation of New Acute Angle OpenerZhao Shuhong, Tan Hewen, Zhang Xianmin, Liu Hongjun, Cao Xiuzhen, Yang Yueqian(School of Engineering,Northeast Agricultural University,Harbin 150030,China)
Aiming at the problem that the acute angle openers have great soil disturbance, three new acute angle openers(the type of opener with biomimetic sailfish、arc and slash)were designed based on the head profile curve of sailfish. Two kinds of soil moisture(12±1%,16±1%)and two kinds of trench depth (60 mm,90 mm)were chosen to simulate the working resistance and soil disturbance of three kinds of openers based on discrete element method and conduct the soil groove test. By comparing the simulation and experimental results obtained, feasibility and accuracy of simulation for the working process of openers were verified. At the trench depth 60mm,three kinds of openers、soil moisture were chosen as factors to simulate in 9 kinds of working condition. The results show that the working resistance of three kinds of openers increases with the trench depth and soil moisture increasing. The working resistance exerted on biomimetic sailfish opener is the least. The soil disturbance width of three kinds of openers increases with the trench depth increasing and the soil disturbance of biomimetic sailfish opener is weaker than the kinds of arc and slash. This paper provides a feasible method for the design of opener and a theoretical basis for its design and optimization by discrete element simulation and experimental analysis.
opener;discrete element;soil disturbance; simulation
2016-09-06
“十二五”国家科技支撑计划项目(2014BAD11B01)
赵淑红(1969-),女,哈尔滨人,教授,博士生导师,(E-mail)shhzh091@sina.com。
杨悦乾(1967-),男,黑龙江讷河人,研究员级高级工程师,(E-mail)yangyueqian@126.com。
S223.2;S220.3
A
1003-188X(2017)11-0044-05
猜你喜欢
小学生学习指导·小军迷联盟(2023年12期)2024-01-17 16:46:22
百科探秘·海底世界(2022年8期)2022-05-30 20:57:47
中阿科技论坛(中英文)(2021年2期)2021-03-17 02:40:42
农机化研究(2020年2期)2020-10-17 00:59:16
小学生学习指导(小军迷联盟)(2019年10期)2019-09-24 08:59:54
农机化研究(2018年8期)2018-07-10 11:39:26
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:02
大自然探索(2014年11期)2014-09-10 07:22:44
飞碟探索(2013年2期)2013-08-13 09:31:01
飞碟探索(2012年12期)2012-04-29 23:33:50