
新型落地红枣收获机的设计
2017-03-16 11:09:08王旭峰张攀峰
农机化研究 2017年12期
鲁 兵,王旭峰,3,张攀峰,胡 灿
新型落地红枣收获机的设计
鲁 兵1,2,王旭峰1,2,3,张攀峰1,2,胡 灿1,2
(1.塔里大学 机械电气化工程学院,新疆 阿拉尔 843300;2.新疆维吾尔自治区普通高等学校现代农业工程重点实验室,新疆 阿拉尔 843300;3.中国农业大学 工学院,北京 100083)
为解决南疆矮化密植枣园红枣收获难题,针对矮化密植种植模式下的枣园特点,设计出基于清扫方式和气吸方式相结合的新型落地红枣收获机。介绍了整机结构和工作原理,并对关键部件进行了设计,确定了各关键部件的基本结构和具体型号。同时,分析了红枣清扫聚拢过程,得出清扫辊刷转速、机具前进速度与清扫辊刷清扫效果之间的关系,并通过田间试验验证了清扫辊刷转速、机具前进速度与清扫辊刷清扫效果之间的关系。该机整体尺寸小,适应性强,作业效率高,适用于南疆矮化密植种植模式的枣园进行红枣收获作业。
红枣;矮化密植;收获机;清扫装置
0 引言
红枣是我国特色的林果产品,除了韩国种植有少数的红枣外,我国是红枣种植的主要生产基地[1-2]。新疆的南疆地区(以下简称南疆)空气稀薄、日照时间长、昼夜温差大等气候条件有利于红枣的糖分积累,为南疆红枣的优良品质奠定了基础[3]。南疆是我国的主要红枣种植地区,也是我国优质红枣的主要生产基地。目前,南疆的枣园种植模式普遍采用矮化密植种植模式[4]。随着新疆生产建设兵团“减棉、增粮、增果、扩畜”的农业结构调整方针的实施,红枣种植规模仍然在不断扩大,红枣种植已成为南疆特色林果支柱产业。但是,大面积的红枣采收仍然依靠人工捡拾来完成,严重制约了红枣产业的发展。
针对新疆红枣采收作业难题,新疆农垦科学院汤智辉等研制出4YS-24型红枣收获机,主要通过液压驱动夹持装置夹持枣树树干进行振摇果树收获作业,但并不适用于矮化密植种植模式[5-6]。石河子大学坎杂等研制出4ZZ-4型红枣收获机,主要通过激振装置对枣树上的红枣进行采摘收获[7-9],对掉落地面红枣收获比较困难且对枣树有一定的损伤,目前仍处于研制阶段。塔里木大学史高昆等研制出YE3600型气吸式红枣收获机,主要运用负压风机形成负压对地面红枣进行气吸捡拾收获[10],枣园地面红枣分布比较分散,风机负压口的有效作业距离小,导致该型红枣收获机械的作业效率受到限制。
为此,利用清扫方式和气吸方式相结合,设计了一种适用于落地红枣进行捡拾收获的新型落地红枣收获机械。该机具解决了枣园地面红枣分布比较分散和风机负压口有效作业距离小的难题,适用于对南疆枣园种植模式下的落地红枣进行收获作业。
1 整机结构及工作原理
1.1 整机结构
机具由清扫装置、仿形铲枣装置、红枣输送管、柴油机、传动系统、电启动装置、风机、集枣箱、手推扶杆、调整轮、调整轮调节手轮、行走轮及机架等部分构成,如图1所示。
1.2 工作原理
新型落地红枣收获机是利用清扫聚拢和气吸捡拾两种方式相结合的新型落地红枣收获机械,与消防风机配套使用。首先,利用消防风机将枣树底下的红枣向枣树行间吹拢集中形成宽度约为1m“红枣带”;然后,利用新型落地红枣收获机械进行清扫与气吸收获作业。工作过程中,通过手推扶杆推动机具向前行进作业;机具最前方的清扫装置通过一对呈“V”型布置的清扫辊刷将枣行间的“红枣带”清扫聚拢形成垄状;机具向前行进时,仿形铲枣装置将形成垄状的红枣铲起,红枣中的土块、石子等杂质从仿形铲枣装置的去杂缝隙中漏出,实现杂质与红枣的分离;红枣不断向仿形铲枣装置的尾部移动,利用风机形成的负压使仿形铲枣装置尾部的红枣沿红枣输送管输送到集枣箱,完成红枣收获。机具除行走以外的动力全部由柴油机提供,通过调整轮调节手轮可实现清扫装置最下端清扫刷丝的变形量和清扫辊刷对地压力的控制。

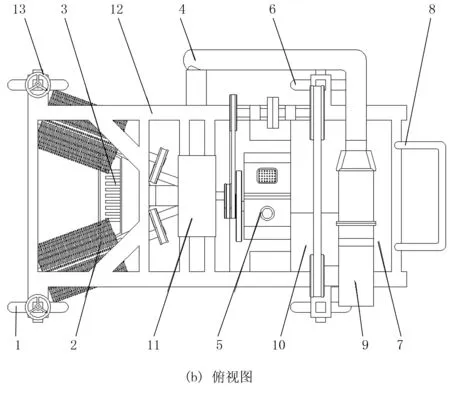
1.调整轮 2.清扫装置 3.仿形铲枣装置 4.红枣输送管 5.柴油机 6.行走轮 7.集枣箱 8.手推扶杆 9.风机 10.电启动装置 11.传动装置 12.机架 13.调整轮调节手轮图1 新型落地红枣收获机结构示意图Fig.1 Sketch diagram of new type jujube harvest machine
1.3 主要技术参数
根据南疆枣园矮化密植种植模式的建园要求,确定新型落地红枣收获机的主要技术参数如表1所示。

表1 新型落地红枣收获机主要技术参数

续表1
2 关键部件设计与选型
2.1 清扫装置
新型落地红枣收获机通过清扫装置将枣园行间的“红枣带”清扫聚拢形成垄状。清扫作业是完成落地红枣收获的一个重要环节,因此清扫装置的设计非常关键。清扫装置主要由1对呈“V”型布置的清扫辊刷组成。清扫辊刷转速和机具的前进速度是影响清扫辊刷清扫效果的主要因素,而清扫辊刷的最下端刷丝接地点的速度大小和方向直接与清扫辊刷清扫聚拢红枣的效果相关[11-12]。清扫辊刷转速和机具的前进速度对清扫辊刷接地点速度的大小和方向的影响分析如图2所示。
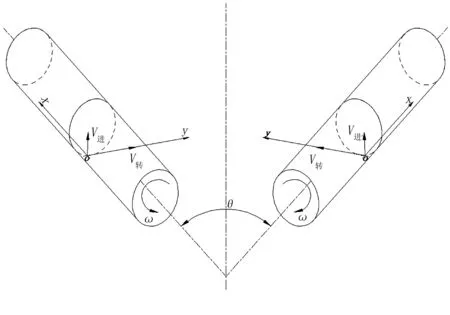
V进为机具向前行进的速度;V转为清扫辊刷接地点的圆周切线速度;θ为两清扫辊刷的夹角的速度;ω为清扫辊刷旋转的角速度。
图2 清扫辊刷接地点刷丝速度分析
Fig.2 Velocity analysis of ground points of cleaning roller-brush
2.1.1 清扫辊刷转速对清扫效果的影响
清扫辊刷转速对清扫辊刷接地点的绝对速度有直接影响。当机具的行进速度V进保持不变,清扫辊刷分别以ω和2ω角速度旋转,对应清扫辊刷接地点的旋转切线速度分别为V转和2V转。由图3(a)可知:当清扫辊刷旋转切线速度为V转时(δ=90°+θ/2),清扫辊刷接地点的绝对速度V绝和接地点绝对速度与前进方向的夹角β可表示为
(1)
(2)
由图3(b)可知:当清扫辊刷接地点的旋转切线速度为2V转时,清扫辊刷接地点的绝对速度V绝′和接地点绝对速度与前进方向的夹角β′可表示为
(3)
(4)
联立公式(1)~公式(4)得

由上述分析可得:当清扫辊刷的旋转切线速度由V转增大到2V转时,V绝′>V绝,β′>β,说明随着清扫辊刷转速的增大,清扫辊刷接地点的绝对清扫速度和绝对速度与前进方向的夹角均随之增大。清扫辊刷接地点绝对速度的增大有助于地面红枣向前清扫抛射,同时接地点绝对速度与前进方向间夹角的增大有助于清扫过程中地面红枣向枣行中间聚拢集中形成垄状。

图3 清扫辊刷转速对清扫辊刷接地点绝对速度的影响分析Fig.3 Analysis of the effect of rotating speed of roller-brush on absolute
velocityofcleaningroller-brushgroundpoints
2.1.2 机具前进速度对清扫效果的影响
机具前进速度是影响清扫辊刷接地点绝对速度的另一重要因素(见图4)。当清扫辊刷保持角速度ω、旋转切线速度V转不变时,机具分别以V进和2V进速度向前行进。由图4(a)可知:当机具的前进速度为V进时,清扫辊刷接地点的绝对速度V绝和接地点绝对速度与机具前进方向的夹角β同式(1)、式(2)所示。
由图4(b)可知:当机具的前进速度为2V进时,清扫辊刷接地点的绝对速度V绝′和接地点绝对速度与机具前进方向的夹角β′可表示为
(5)
(6)
联立公式(1)、(2)、(5)、(6)可得

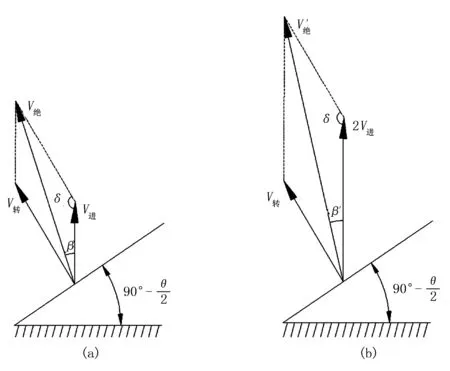
图4 机具前进速度对清扫辊刷接地点绝对速度的影响分析Fig.4 Analysis of the effect of forward speed of machine on absolute
velocityofcleaningroller-brushgroundpoints
2.2 风机型号选取
新型落地红枣收获机采用吸送式气力输送方式对仿形铲枣装置收集的红枣进行输送。气力输送主要利用气流对红枣进行输送,气流速度的大小直接影响对红枣气力输送的效果,风机型号的选择直接决定了气流速度的大小。为保证红枣不在输送管中堵塞实现顺利输送,对红枣气力输送的气流速度进行理论分析计算。根据气力输送原理和结合实际情况,红枣气力输送的气流速度为[13]
Va=φVt
(7)
(8)
式中Va—气力输送的气流速度(m/s);
Vt—物料的悬浮速度(m/s);
φ—速度系数;
m—物料的质量(kg);
g—重力加速度,g=9.8m/s2;
ρs—输送物料的密度(kg/m3);
ρf—流体的密度(kg/m3);
A—垂直于流体流动方向的物料投影面积;
C—阻力系数。
采用液浸法测得红枣的密度ρs为410~750kg/m3(含水率对红枣的密度影响较大);空气密度ρf为1.205kg/m3;由红枣输送管的安装形式、复杂程度以及红枣的相关特性确定速度系数φ的取值范围为2.4~5.0;单颗红枣的质量m为5.7~12.8g;C的取值为0.44。根据公式(7)、(8),可计算出红枣气力输送的气流速度Va为24.5m/s。再根据红枣气力输送需要的气流速度,可计算确定风机型号为CF-2.5A型离心风机。
2.3 仿形铲枣装置
仿形铲枣装置主要由帆布皮带、仿形轮、仿形铲及仿形铲铰接部位组成,具体结构如图5所示。
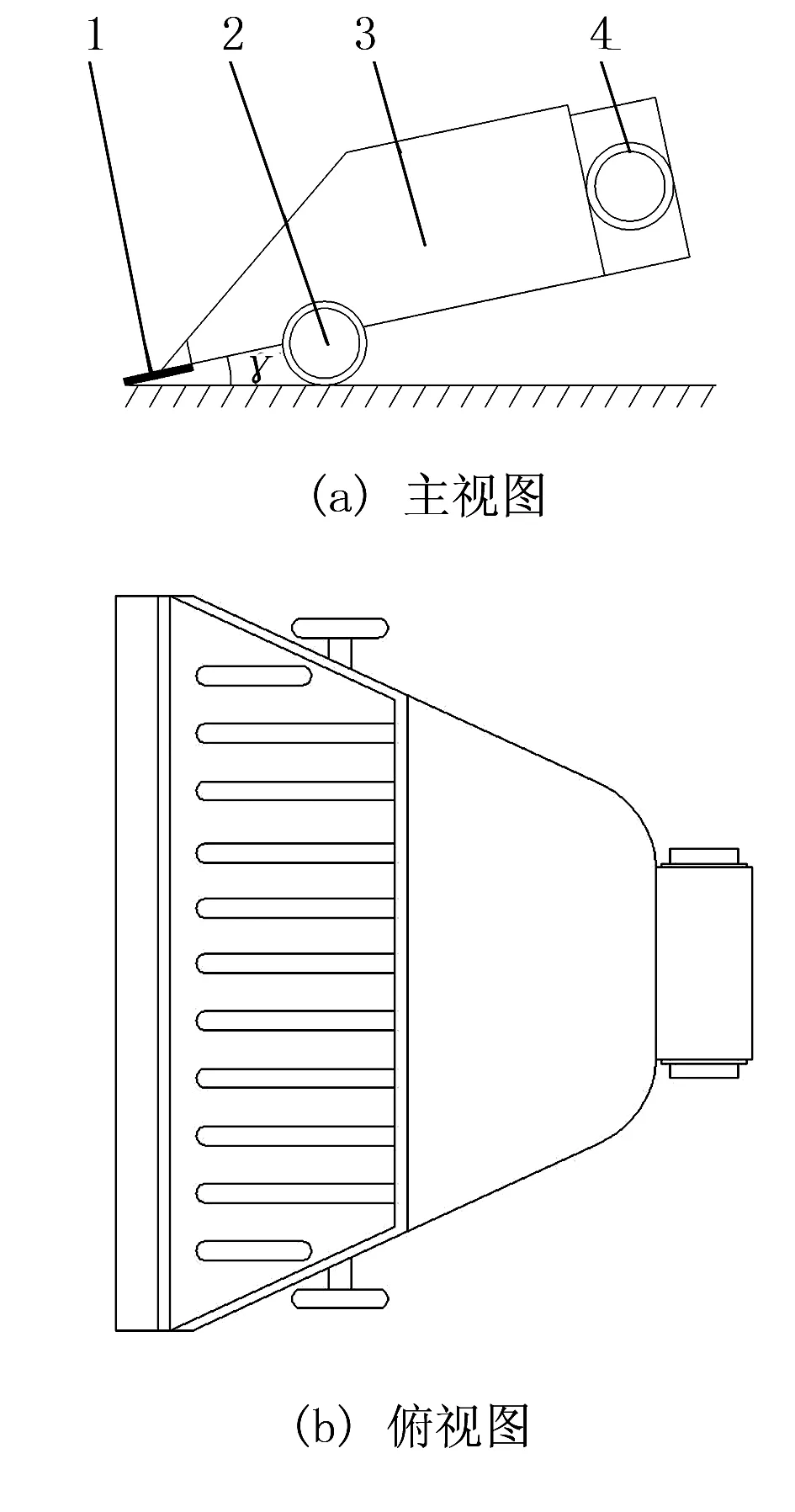
1.帆布平带 2.仿形轮 3.仿形铲 4.仿形铲铰接部位图5 仿形铲枣装置结构示意图Fig.5 Schematic diagram of copying shovel
其中,仿形铲铰接部位通过铰链与机架连接在一起,构成机具的一个重要工作部件。作业时,仿形铲枣装置可绕仿形铲铰接部位进行转动,保证仿形轮在整个装置的重力作用下始终沿地面向前行进,也保证了仿形铲的铲口边缘始终贴近地表。为避免仿形铲在作业时对红枣造成损伤,在铲口安装一段帆布皮带。帆布皮带在减少收获红枣损伤的同时,也进一步保证了仿形铲枣装置的仿形效果。
通过对红枣外形尺寸进行测量统计,确定仿形铲枣装置的长条状去杂缝隙的宽度为14mm。同时,为保证红枣在仿形铲枣装置中能够顺利地向仿形铲后部移动,仿形铲与地面之间的夹角γ应满足γ 2.4 传动系统 传动系统主要由V带传动和齿轮箱传动组成,如图6所示。整个机具的作业动力由柴油机提供,柴油机的输出动力通过两条传动路线分别传递到风机和清扫装置。传动路线Ⅰ通过两级V带传动将柴油机的输出动力输送到风机,传动路线Ⅱ通过V带传动和齿轮箱传动将柴油机的输出动力传送至清扫装置。为减小柴油机启动时的启动载荷和增加机具的安全性能,在两条传动路线中增加牙嵌式离合器以利于对工作装置的控制。 田间试验在新疆生产建设兵团第一师六团标准化矮化密植枣园进行。试验枣园枣树种植行距和株距分别为2.5m和1.5m,枣树高2~2.5m,树龄5年,在枣树行间人工铺撒红枣模拟机具实际的作业环境。机具的前进速度和清扫辊刷转速影响机具清扫聚拢红枣的效果。根据实际情况,对机具分别进行前进速度为0.7 、1.1、1.5km/h,清扫辊刷转速为120、140、160r/min的单因素田间模拟试验。试验结果表明:新型落地红枣收获机在矮化密植枣园进行红枣收获,效果良好;随着清扫辊刷转速的增大,机具向前清扫红枣形成垄状的质量明显提高;随着机具前进速度的增大,机具对落地红枣向前抛射的力度有所增大,但形成垄状的质量降低。 1)根据南疆枣园的建园模式和枣农对红枣收获的要求,设计了基于清扫方式和气吸方式相结合的新型落地红枣收获机,为矮化密植枣园红枣收获机的设计提供了新思路。 2)通过对关键工作部件进行设计和选型,分析了各关键部件的主要参数对红枣收获的影响,并确定了各关键部件的主要结构、参数要求和具体型号。 3)通过田间模拟试验,验证了新型落地红枣收获机可用于南疆矮化密植枣园进行红枣收获作业。同时,验证了清扫辊刷转速、机具前进速度与清扫辊刷清扫效果之间的关系。 [1] 罗华平,卢启鹏,丁海泉,等.南疆红枣品质近红外光谱在线模型参数的实验研究[J].光谱学与光谱分析,2012,32(5):1225-1229. [2] 闫忠心,鲁周民,刘坤,等.我国红枣资源加工利用研究现状与展望[J].西北农林科技大学学报:自然科学版,2010(6):102-108. [3] 鲁兵,胡灿,王旭峰,等.振动式红枣多层除杂分级机的设计与试验[J].农机化研究,2017,39(1):152-157. [4] 陶雪英.新疆红枣产业发展现状及对策建议[J].新疆农业科技,2011(4):2-3. [5] 汤智辉,沈从举,孟祥金,等.4YS-24型红枣收获机的研制[J].新疆农机化,2010(1):30-32. [6] 孟祥金,汤智辉,沈从举,等.4YS-24型红枣收获机[J].新疆农机化,2013(1):13-14. [7] 付威,何荣,曲金丽,等.自走式矮化密植红枣收获机的设计[J].农机化研究,2014,36(4):106-109. [8] 何荣,坎杂,付威,等.矮化密植红枣收获机激振装置设计与运动分析[J].农机化研究,2014,36(2):64-67. [9] 付威,杨红英,王丽红,等.4ZZ-4型自走式红枣收获机[J].湖南农机,2012(5):68-69. [10] 史高昆,马少辉.气吸式红枣捡拾机设计与试验[J].农业工程,2014,4(5):109-112. [11] 简洁.电动清扫车清扫作业装置的设计与研究[D].南京:南京理工大学,2012. [12] 张巍.清扫车清扫机构的控制研究[D].重庆:重庆大学,2001. [13] 周祖锷.农业物料学[M].北京:中国农业出版社,1994. Design of New Type Landing-jujube Harvest Machine Lu Bing1,2, Wang Xufeng1,2,3, Zhang Panfeng1,2, Hu Can1,2 (1.College of Mechanical and Electrical Engineering, Tarim University, Alar 843300, China; 2.The Key Laboratory of Colleges & Universities under the Department of Education of Xinjiang Uygur Autonomous Region, Alar 843300,China; 3.College of Engineering, China Agricultural University, Beijing 100083, China) In order to solve jujubes harvesting problem of dwarf and dense planting jujube in South Xinjiang. According to the characteristics of dwarf and dense planting jujube orchard, a new type landing-jujube harvest machine that combined the pattern of cleaning and vacuum was designed and finally the structure parameters and specific type were determined. The whole structure and working mechanism of the machine were introduced, the key operation components of the machine were designed. The processes of jujubes cleaning gather were analyzed and the relationships between roller-brush rotating speed, forward speed of machines and cleaning effect of roller-brush were achieved. And the relationships were tested and verified by field experiments. The machine has advantages of small overall dimension, good adaptability, high operation efficiency and can be used to harvest landing-jujube of dwarf and dense planting jujube orchard in south Xinjiang. jujube; dwarf and dense planting; harvest machine; cleaning device 2016-09-26 国家自然科学基金项目(11562019);公益性行业(农业)科研专项(201503105);塔里木大学现代农业工程重点实验室开放课题项目(TDNG20160101);塔里木大学校长基金项目(TDZKQN201510);塔里木大学研究生科研创新项目(TDGRI201514) 鲁 兵(1991-),男,湖北黄冈人,硕士研究生,(E-mail) 1170027843@qq.com。 胡 灿(1983-),男,湖南益阳人,讲师,(E-mail)hucan-boy1@qq.com。 S225.93 A 1003-188X(2017)12-0068-053 田间试验
4 结论
猜你喜欢
河北果树(2021年4期)2021-12-02 01:14:52
今日农业(2021年16期)2021-11-26 06:05:34
机械设计与制造工程(2021年3期)2021-04-16 13:06:46
河北果树(2020年1期)2020-02-09 12:31:18
河北果树(2020年2期)2020-01-09 11:15:07
河北果树(2020年1期)2020-01-09 06:59:50
魅力中国(2018年38期)2018-03-22 12:52:32
老友(2017年7期)2017-08-22 02:36:36
销售与市场(管理版)(2016年3期)2016-12-29 00:26:25
科技与创新(2015年20期)2015-10-29 22:46:26
