船舶无轴推进器中旋转型水润滑橡胶支撑轴承最大位移量研究
2017-03-14 11:15兰任生靳栓宝
船电技术 2017年2期
兰任生,靳栓宝,祝 昊,沈 洋,刘 涛
(海军工程大学舰船综合电力技术国防科技重点实验室,武汉430033)
船舶无轴推进器中旋转型水润滑橡胶支撑轴承最大位移量研究
兰任生,靳栓宝,祝 昊,沈 洋,刘 涛
(海军工程大学舰船综合电力技术国防科技重点实验室,武汉430033)
旋转型水润滑橡胶支撑轴承运行时的固有跳动现象,会使永磁电机的电磁气隙产生随动变化,导致动偏心问题。为了减少这种动偏心现象对推进器振动噪声的不良影响,将旋转型水润滑橡胶轴承跳动所导致的最大位移量限定在电磁气隙的5%以内,提出了一种设计和验证方法。文章以某型船舶无轴推进器中旋转型水润滑橡胶支撑轴承最大位移量0.4 mm为主要设计目标,通过有限元仿真计算得出在极端干摩擦工况下最大位移量为0.36 mm,搭建新型实验平台,试验验证测得最大位移量为0.28 mm。仿真值与结果表明设计轴承达到设计指标,文中设计方法有效可靠,为设计旋转型水润滑橡胶轴承提供了科学依据。
无轴推进器 水润滑轴承 橡胶轴承 位移量
0 引言
船舶无轴推进器是一种将永磁推进电机转子与推进器桨叶集成为一体,取消了传统的穿舱推进轴系和密封系统,并采用电能直接传递功率输出的新型船舶全电力推进技术[1,2]。目前挪威布伦沃尔(Brunvoll)公司已经成功开发了功率等级从200千瓦到1.5兆瓦间的船舶无轴推进器系列。英国罗尔斯罗伊斯(Rolls-Royce)和德国福伊特(Voith)等世界知名推进器制造商也都开发出了百千瓦功率等级的船舶无轴侧向推进器[3-5]。
船舶无轴推进器的主要技术特点之一,是采用了推力与支撑轴承组合而成的一体化水润滑轴承。其中,水润滑橡胶支撑轴承通常布置在桨叶轮毂中,并随桨叶一同旋转[6-9]。这种旋转型水润滑橡胶支撑轴承相比于传统的静止型水润滑橡胶艉轴轴承而言,具有以下特点:1)桨叶重力载荷与轴承承载力中心基本重合,因此轴承载荷分布均匀,轴承磨损量、最大工作温度和振动噪声相对较小;2)轴承旋转工作后,在混合摩擦状态,轴承摩擦副的磨损面沿桨叶旋转方向成 360°均匀分布,进而提高了轴承的使用寿命。但是旋转型水润滑橡胶支撑轴承运行时的固有跳动现象,会使永磁电机的电磁气隙产生随动变化,出现动偏心问题。所以,为了减少这种动偏心现象所导致的转子最大位移对推进器振动噪声的不良影响,将旋转型水润滑橡胶轴承的最大位移量限定在电磁气隙的5%以内。
为了改善轴承散热和排异性能,一般把水润滑橡胶轴承设计成带沟槽的结构。Cabrera和Wang[10]通过数值分析研究表明,即使在水膜建立后的工作条件下,水润滑橡胶支撑轴承也会和轴发生接触,进而产生一定的橡胶变形。孟凡明[11]使用自编流固耦合轴承有限元程序,利用影响系数法和非线性优化法研究得出:水润滑橡胶轴承在载荷 200 kN工作条件下会发生明显的弹性变形。Daugherty[12]研究了7种板条型橡胶轴承的动摩擦系数随速度变化的关系,发现橡胶变形会阻碍轴承转动,得出橡胶轴承衬厚度越薄动摩擦系数越小的结论。秦红玲[13]基于轴承实验平台研究了橡胶厚度和硬度对动摩擦性能的影响,观察到动摩擦系数随橡胶厚度和硬度降低而降低的现象。此外,Litwin[14]通过有限元软件理论分析研究表明,结构和材料对轴承的动压润滑特性和轴心轨迹影响较大,因此优化轴承的材料和结构能显著提升水润滑橡胶轴承的工作性能。
在船舶无轴推进器中,水润滑橡胶轴承与螺旋桨集成为一体并随螺旋桨一同旋转,所以轴承的最大位移量将直接反应为螺旋桨的动偏心量。为了防止螺旋桨动偏心对无轴推进器综合性能的影响,本文将开展对旋转型水润滑橡胶支撑轴承最大位移量的有限元仿真与旋转型水润滑支撑轴承综合试验台架测试相结合的研究方法,验证旋转型水润滑橡胶轴承是否满足单边最大位移量小于0.4 mm的设计指标。
1 旋转型水润滑橡胶支撑轴承最大位移量设计
当以轴承位移量为主要设计指标时,旋转型水润滑支撑轴承的研制流程如图 1所示。首先明确设计输入,研究分析水润滑橡胶轴承使用工况和技术要求,通过解析模型设计水润滑橡胶轴承初始方案,即轴承的内径、外径、轴向长度和比压安全系数。然后基于数值模型和有限元模型开展优化设计,分析了接触状态下水润滑橡胶轴承接触应力、变形分布等,通过公式(3)换算出水润滑橡胶轴承主轴位移量。当轴承位移量满足设计要求后,开展轴承的制造和台架试验验证。

图 1位移量设计方案
根据某型船舶无轴推进器的名义径向载荷1.9 kN、比压p小于0.246 MPa(与国外同类产品相比,安全系数大于 1)和轴承尺寸限定的设计要求,结合图 1的设计流程,经数值模型设计得出了旋转型水润滑支撑轴承的初始设计方案为轴承内径115 mm、外径136 mm、长度126.5 mm。进而得出轴承的比压为:

根据国外同类产品名义载荷[p]=0.246 MPa,则安全系数为:

初始设计轴承的比压安全系数大于 1,满足设计指标。旋转型水润滑橡胶支撑轴承的初始方案(见图2)和设计参数见表1。
2 旋转型水润滑橡胶支撑轴承位移量分析
由于水的粘度很低,所以旋转型水润滑橡胶支撑轴承运行时所形成的水膜很薄。容易受到外界干扰,而发生支撑轴与轴承橡胶轴衬间的接触现象。因此,在分析水润滑橡胶轴承最大位移量时,可以将轴承的位移量分为两个部分:一个部分是轴承与轴的装配间隙,以及制造公差;另一个部分是橡胶轴衬发生的弹性形变, 并总结为:

上式中:J—轴承位移量;
ESb—轴承上偏差,ESb= 0.25;(实际轴承加工后115.25 mm);
∆S—橡胶轴衬变形量;
EIj—轴承下偏差,EIj= 0.09。(实际轴加工后115.09 mm)

表1 旋转型水润滑橡胶支撑轴承初始设计参数
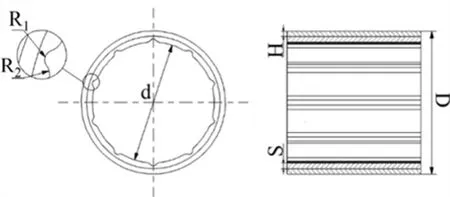
图2 旋转型水润滑橡胶支撑轴承初始设计方案结构图
本文所研究的旋转型水润滑橡胶支撑轴承要求在转速600 r/min、径向载荷1.9 kN的工况下,轴承最大位移量不超过0.4 mm.据此,利用Ansys Workbench 16.1有限元商业软件进行直槽型水润滑橡胶支撑轴承轴承弹性形变分析。有限元分析的详细步骤如下:
1)材料参数确定
旋转型水润滑橡胶支撑轴承的组成材料及参数如表2所示。
2)几何模型建模
本文中建模的有限元模型分为水润滑橡胶支撑轴承和静止轴两部分,如图 3所示。结合公式(3),需要将水润滑橡胶轴承考虑实际加工误差。因此,通过对水润滑橡胶轴承样件的实际测量,得到轴承内径为115.25 mm,轴直径为115.09 mm,轴承长度为126.5 mm。此外建模的初始偏心率e = (偏心距/半径间隙)= 1,在此条件下水润滑橡胶轴承与轴刚好接触,并未发生弹性形变。

图 3 水润滑橡支撑胶轴承模型
3)网格剖分
为了精确计算橡胶轴承在承压后的弹性变形,对橡胶轴衬网格进行了加密,其中模型的网格节点数为517312、单元数为116960。

图 4 直槽水润滑橡胶轴承网格划分
4)边界条件设置
水润滑橡胶轴承是通过模压硫化精密成形工艺将丁腈橡胶材料硫化在铜管内壁上,因此故橡胶内衬与铜管采用了绑定边界条件,如图5所示。轴和橡胶轴衬工作面的接触边界条件设定为摩擦边界条件摩擦系数取0.15,转速为600 r/min。假设水润滑橡胶轴承处于最极端的干摩擦工况条件下运行,即静止轴和水润滑橡胶轴承,并求解此时橡胶轴衬的最大变形量。为了便于分析,将轴承外壳固定约束,对主轴施加1.9 kN径向载荷。
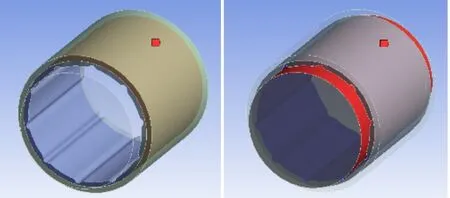
图5 直槽水润滑橡胶轴承接触边界条件
目标水润滑橡胶轴承的应力和变形分布如图6所示。可以清晰的观察到,与轴发生接触的轴衬中有4块板条承担了径向载荷,其中最大应力为0.26 MPa。由于没有约束限制,橡胶轴衬的变形主要分布在轴承两端,因此是水润滑橡胶轴承弹性形变量最大的区域。最终,仿真得出水润滑橡胶轴承的最大位移量为0.36 mm。
3 旋转型水润滑橡胶支撑轴承试验分析
在仿真分析水润滑橡胶轴承最大位移量符合设计要求后,开展了橡胶轴承的加工制造工作。图7展示的是水润滑橡胶轴承三维制图与实际产品照片。
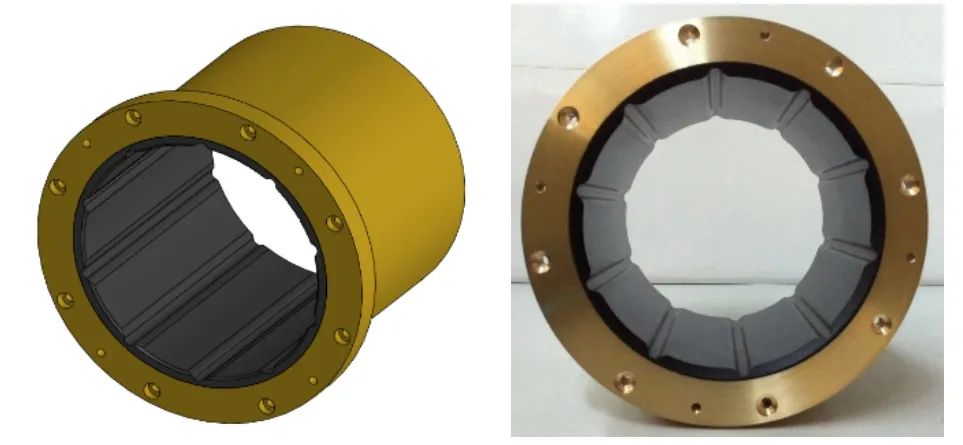
图7 直槽型水润滑橡胶轴承三维与实物图
由于目标水润滑橡胶支撑轴承为特有的旋转型工作模式,因此需要在专门设计的水润滑轴承试验台架上开展性能分析试验工作。图 8展示的是新型旋转型水润滑轴承综合测试台架,其中轴承的最大位移量是利用电涡流传感器进行测量的。

图 8水润滑橡胶旋转支撑轴承实验平台
表3总结了旋转型水润滑橡胶支撑轴承的试验数据。从中可以看出,在温度、转速、载荷一定的情况下,旋转型水润滑橡胶支撑轴承的最大位移量随进口水压的变化有轻微幅度改变,因此旋转型水润滑橡胶支撑轴承的最大位移量随水压变化关系微弱。此外,轴承最大位移量幅值与有限元仿真结果0.36 mm有较好的吻合度,并且都一致表明轴承最大位移量值小于0.4 mm的设计要求。通过仿真值与试验值对比,验证了文中旋转型水润滑橡胶轴承最大位移量计算方法的可行性。

表3 水润滑橡胶轴承位移量试验台架测量结果
4 结论
由于船舶无轴推进器中的旋转型水润滑橡胶支撑轴承具有特殊工作方式和与推进电机转子高度集成的特点,使其最大位移量成为关键的设计指标之一。本文利用有限元建模仿真计算和新型水润滑轴承试验台架测试分析,验证了所设计的旋转型水润滑橡胶支撑轴承能够达到最大位移量小于某一设计值。试验结果还表明,旋转型水润滑橡胶支撑轴承的最大位移量随进口水压的变化关系微弱。
本文为系统性的建立对旋转型水润滑橡胶支撑轴承摩擦学性能的研究,奠定了基础。
[1] 马骋.吊舱推进技术[M].上海: 上海交通大学出版社, 2007.
[2] Shen. Y, Design of novel shaftless pump-jet propulsor for multi-purpose long-range and high-speed autonomous underwater vehicle, IEEE Trans. Magn., vol. 52, ( 7), 2016.
[3] 汪勇, 李庆.新型集成电机推进器设计研究[J].中国舰船研究, 2011, 6, (11): 82-85.
[4] 安斌.水下特种推进电机研究[D].西安: 西北工业大学, 2005.
[5] 张晓飞.超小型水下机器人对转集成电机推进器研究[D].广州: 华南理工大学, 2012.
[6] 许云龙.高速永磁电机损耗计算与热分析[D].沈阳:沈阳工业大学, 2009.
[7] 邢军强.高速永磁电机转子损耗及通风散热研究[D].沈阳: 沈阳工业大学, 2011.
[8] 江善林.高速永磁同步电机的损耗分析与温度场计算[D].哈尔滨: 哈尔滨工业大学, 2010.
[9] 郭婷.IMP推进器导管优化及桨叶强度校核方法研究[D].武汉: 武汉理工大学, 2012.
[10] Cabrera D L, Woolley N H, Allanson D R, et,al. Film pressure distribution in water lubricated rubber journal bearings[J]. Proc. IMechE, J. Eng. Tribol, 2005, 2, 125-132.
[11] 孟凡明. 水润滑轴承系统三维热弹流性能有限元分析[J]. 重庆大学学报, 2013,36(2): 121-126.
[12] Daugherty T L, Sides N T. Frictional characteristic of water lubricated compliant surface stave bearing[J]. Tribology international, 2009, 42(2): 378-390.
[13] 秦红玲, 周新聪, 闫志敏. 尾轴承橡胶层厚度和硬度及其交互作用对摩擦性能的影响[J]. 兵工学报, 2013, 34(3): 318-323.
[14] Litwin W. Experimental research on water lubricated three layer sliding bearing with lubrication grooves in the upper part of the bush and its comparision with a rubber bearing[J]. Tribology international, 2015, 82: 153-161.
Maximum Displacement of Rotary Water Lubricated Rubber Bearing for Shipborne Shaftless Propulsor
Lan Rensheng, Jin Shuanbao, Zhu Hao, Shen Yang, Liu Tao
(National Key Laboratory of Science and Technology on Vessel Integrated Power System, Naval University of Engineering, Wuhan 430033, China)
The elastic deformation of rotary water lubricated rubber bearing (RWLR bearing) presents negative effect on impeller eccentricity, which results in undesired fluctuation of output torque. Therefore, the amount of maximum elastic deformation of RWLR is designed below than 5% of electric machine’s electromagnetic air-gap length. In this paper, a RWLR bearing with the design aim of achieving maximum elastic deformation below than 0.4 mm is designed and evaluated by both finite-element analysis (FEA) and test. It is founded that the amount of maximum deformation of RWLR is 0.36 mm by FEA and 0.28 mm by experiment. The results show that bearing reaches the design target and the design method is effective and reliable. It provides scientific basis for the design of RWLR bearing.
rubber bearing; shaftless propulsor; runout; water lubricated bearing.
U664.21
A
:1003-4862(2017)02-0016-04
2016-09-06
国家自然科学基金青年科学基金资助项目(51307177,51309229,51409256)
兰任生(1992-),男,硕士生。专业方向:电气工程。E-mail: 532087205@qq.com
猜你喜欢
哈尔滨轴承(2022年2期)2022-07-22
哈尔滨轴承(2022年1期)2022-05-23
军事文摘(2021年18期)2021-12-02
哈尔滨轴承(2021年2期)2021-08-12
小学科学(学生版)(2021年6期)2021-07-21
哈尔滨轴承(2021年1期)2021-07-21
舰船科学技术(2021年12期)2021-03-29
当代陕西(2018年12期)2018-08-04
小学科学(学生版)(2018年6期)2018-06-26
橡胶工业(2015年4期)2015-07-29