一种改善和差测角盲区的快速算法
2017-03-12 06:46:25刘春静
雷达科学与技术 2017年4期
刘春静
(1.中国电子科技集团公司第三十八研究所, 安徽合肥 230088;2.孔径阵列与空间探测安徽省重点实验室, 安徽合肥 230088)
0 引言
和差测角是一种广泛使用的角度测量技术,测量精度高、计算简便易用等优点,应用于各种工程设计领域。和差测角的基本原理是利用和差波束之间幅度比较估计目标偏离天线轴中心的角度,根据和差波束之间的相位比较估计目标偏离天线轴中心的方向。当和波束接收到的目标信噪比不够高时,差波束接收到的信号将被噪声淹没,达不到正确测量的要求,从而导致固有的角度测量盲区。测量盲区的大小与被检测目标的信噪比有关,信噪比越高,测量盲区越小,而常用的和差测角精度与信噪比的表达式并没有考虑到测量盲区的影响。
文献[1-4]研究了和差测角性能与目标信噪比、天线幅相不一致性、阻抗匹配误差等因素的关系;文献[5-7]研究了二维阵列的和差角度测量及工程化设计方法,提出了快捷简便的查表法测角;文献[8-12]针对高精度测量雷达中的和差跟踪测角进行了应用分析,提出了基于跟踪滤波器的角度测量;文献[13-14]讨论了干扰环境下的和差测角问题,给出了可行的解决方案。虽然研究和差测角的文献资料很多,但尚未有关于测角盲区的分析,本文从和差测角的基本原理出发,分析了角度测量盲区与目标信噪比的关系,提出采用两波束的超分辨角度测量算法——多重信号分类(Multiple Signal Classification, MUSIC)算法,不仅能够大大提高角度测量精度,彻底消除和差测量盲区,而且推导了两波束MUSIC算法的快速求解闭式,具有运算复杂度低、实时处理容易实现的优点。此外,该方法不限于一维阵列的使用,能够适用于任意二维或三维阵列。
1 和差测角盲区分析
设一维N元均匀直线阵列的阵元间距为d,工作频率为f0,波长为λ0,波束指向为θ0,a(θ)为天线阵列的N维导向矢量,s为接收信号的包络波形,n为天线阵列的接收机噪声向量,则和差波束的输出信号分别为
(1)
(2)
式中,wΣ,wΔ分别为和差波束的N维加权向量, (·)H表示矩阵的共轭转置,x为天线阵列接收的N维信号向量,即
x=a(θ)s+n
(3)

(4)
当N个接收通道的噪声方差近似相等时,则上述条件简化为
(5)
从和差波束的接收信号表达式可以看出,接收信号的能量由加权信号和加权噪声两部分组成,当和差波束接收到的加权信号能量都很强时,和差比幅测角能够获得较好的测量精度;然而在实际系统的目标检测中,如果以12 dB信噪比为和波束的检测门限,则对于略大于检测门限的目标信号,差波束在零轴附近区域的接收信号幅度可能非常小,此时差波束中的加权噪声占据了主导地位,不仅不能够正确测量出和差波束的幅度比值,也不能够正确判断目标偏离零轴的方向。
2 改善和差测角盲区的快速算法
为了减小和差测角盲区,在信噪比一定的条件下,采用波束域的超分辨MUSIC算法提高测角精度;由于只针对一个目标测量角度,避免矩阵特征分解导致的巨大运算量,将对称的天线阵面(一般情况下都能够满足该条件)划分为两个相同的阵面,分别形成两个指向相同、具有恒定相位差的空间接收波束。超分辨测量的角度范围很小,不会超过一个波束宽度,因此在阵面允许的条件下,两个波束的相位中心可以选择较大的间距差,而不会受到角度模糊的影响[15]。
设两个空间接收波束的采样数据向量为
x(t) =as(t)+n(t)
(6)
式中,a为2×1的空间信号导向矢量,s(t)为入射信号,n(t)为高斯白噪声向量,采样数据向量的协方差矩阵估计为
(7)
式中,M为选择的数据样本数。数据样本的选择必须剔除掉其他疑似目标,保证所有的数据样本中只有一批期望的目标,协方差矩阵Rx的特征多项式为
λ2-(a11+a22)λ+a11a22-a12a21=0
(8)
则特征值λ为
(9)
令λmin为最小特征值,定义
(10)
式中,E为单位矩阵。则协方差矩阵最小特征值(即噪声特征值)对应的特征向量为
(11)
根据超分辨MUSIC算法的原理,空间谱计算表达式为
(12)
式中,a(θ)为方向θ的阵列导向矢量。空间谱扫描的峰值位置则为目标角度的估计值。
根据以上算法步骤估计两波束超分辨MUSIC的运算量,在M个样本的采样时间内,即MTs(Ts为采样时间间隔),需要完成协方差矩阵估计(4M次复乘法、M次复加法、1次复除法)、特征值计算(6次复乘法、6次复加法、1次求根和1次复除法)、噪声特征向量计算(1次复加法、1次复除法)、空间谱计算(若空间扫描L个角度,则为2L次复乘法、L次复除法和复加法);整个运算量为(4M+6+2L)次复乘法、(M+7+L)次复加法、(3+L)次复除法、1次求根运算。为了进一步降低运算量,可以将空间谱表达式的峰值搜索简化为求根MUSIC[16],通过对PMUSIC(θ)求导直接估计出目标的最优角度。
3 仿真实验
假设均匀直线阵列的阵元个数为64,工作频率为300MHz, 单元间距为半波长, 和波束采用30dB的泰勒加权,差波束采用30dB的Bayliss加权,则方位法线方向上角度测量盲区与目标信噪比的关系如图1所示。从图中可以看出,随着目标信噪比(Signal-to-NoiseRatio,SNR)的增加,角度测量盲区不断减小;当信噪比足够大时(例如30dB),角度测量盲区已经能够达到0.05°以下。

图1 角度测量盲区与目标信噪比的关系曲线
将64元均匀直线阵划分为两个相同的对称阵面,从而形成方位向的左波束和右波束,两个波束之间在某相同角度上存在恒定相位差,两波束超分辨MUSIC算法的协方差矩阵估计样本数为30,角度扫描间隔为0.001°,Monte-Carlo仿真次数为500次,图2为两波束超分辨MUSIC算法的角度估计均方根误差(RMSE)随目标信噪比变化的关系曲线,从图中可以看出,即使在只有30个样本的条件下,目标信噪比为10dB时已经能够达到0.035°的角度测量精度,远远优于传统的和差测角方法。图3为两波束超分辨MUSIC算法的角度估计RMSE在不同信噪比下随采样样本数变化的关系曲线,在10个样本数的条件下,信噪比为10,15和20dB的角度估计RMSE分别达到约0.06°,0.035°和0.02°;因此实际设计中的两波束超分辨测角在小样本条件下更具有工程应用价值。

图2 两波束超分辨MUSIC算法角度估计RMSE随目标信噪比变化的关系曲线
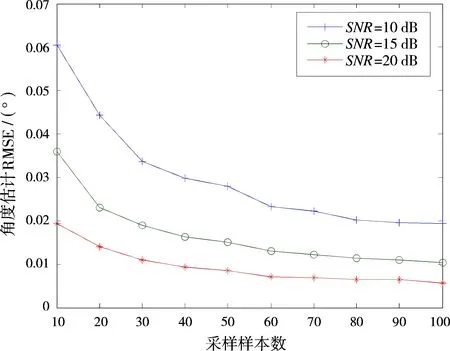
图3 两波束超分辨MUSIC算法角度估计RMSE在不同信噪比下随采样样本数变化的关系曲线
4 结束语
本文通过详细分析和差测角盲区产生的原理,阐述了传统测角方法依赖于信噪比的缺陷,由于实际环境中总能够针对单个目标的角度进行测量,因此通过采用两波束超分辨MUSIC算法实现一个波束宽度内的目标角度估计,不仅可以达到非常高的角度测量精度,而且具有简单可行的闭式表达式,能够应用于各种形式的天线阵列系统中。
[1]马振球,崔嵬. 相位和差单脉冲雷达测角性能分析[J]. 北京理工大学学报, 2009, 29(8):726-731.
[2]周明宇. 毫米波导引头信号处理若干关键技术研究[D]. 南京:南京理工大学, 2015.
[3]ZHOUW,XIEJ,YUANY,etal.AngleMeasurementAccuracyAnalysisofSum-DifferenceAmplitude-ComparisonMonopulseinOnshoreorShipborneISAR[C]∥19thInternationalConferenceonDigitalSignalProcessing,HongKong:IEEE, 2014:531-535.
[4]华瑶. 一种高效的高精度相控阵雷达工程测角方法[J]. 微波学报, 2016, 32(4):88-91.
[5]保的. 相控阵二维和差测角方法及其实现研究[D]. 西安:西安电子科技大学, 2010.
[6]杨蓓蓓. 一种二维数字阵列雷达的和差波束测角方法[J]. 雷达与对抗, 2014, 34(3):6-10.
[7]毛祺,安红,周先敏. 二维相位和差单脉冲雷达的测角性能分析[J]. 电子信息对抗技术, 2007, 22(6):15-18.
[8]员琳红. 和差多波束跟踪算法及工程实现[D]. 西安:西安电子科技大学, 2012.
[9]孔晓丹. 单脉冲跟踪雷达跟踪测量技术应用[D]. 西安:西安电子科技大学, 2011.
[10]MARKINE.MethodofAutomaticTargetAngleTrackingbySum-and-DifferenceMonopulseRadarInvariantAgainstthePolarizationJamming[C]∥7thEuropeanRadarConference,Paris:IEEE, 2010:499-502.
[11]姚海涛. 多波束相控阵天线角跟踪性能及测试方法[J]. 火力与指挥控制, 2015, 40(4):45-50.
[12]XUZhenhai,XIONGZiyuan,WUJiani,etal.SymmetricalDifferencePatternMonopulseforLow-AngleTrackingwithArrayRadar[J].IEEETranson
AerospaceandElectronicSystems, 2016, 52(6):2676-2684.
[13]杨玲. 基于自适应干扰抑制与和差测角性能的阵形评估[D]. 西安:西安电子科技大学, 2011.
[14]张忠传,邰新军,孟庆昌,等. 主/旁瓣干扰对单脉冲测角的影响分析[J]. 雷达科学与技术, 2012, 10(2):207-211.ZHANGZhongchuan,TAIXinjun,MENGQingchang,etal.AnalysisontheEffectofMain/SideLobeJammingonMonopulseAngleEstimate[J].RadarScienceandTechnology, 2012, 10(2):207-211.(inChinese)
[15]刘锐,袁涛,张晨晓. 基于特征分解子阵级自适应和差测角[C]∥第九届全国信号和智能信息处理与应用学术会议, 北京:中国高科技产业化研究会, 2015:166-170.
[16]XUJingwei,WANGChenghao,LIAOGuisheng,etal.SumandDifferenceBeamformingforAngle-DopplerEstimationwithSTAP-BasedRadars[J].IEEETransonAerospaceandElectronicSystems, 2016, 52(6):2825-2837.
猜你喜欢
趣味(数学)(2022年4期)2022-07-02 03:10:02
通信技术(2019年3期)2019-05-31 03:19:08
铁道通信信号(2018年12期)2019-01-31 05:36:42
航天电子对抗(2018年3期)2018-07-14 02:53:30
电子测试(2018年6期)2018-05-09 07:31:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
资源再生(2017年4期)2017-06-15 20:28:30
测绘科学与工程(2016年6期)2016-04-17 06:51:25
中国卫生(2015年5期)2015-11-08 12:09:50
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20