
船舶动力定位模拟器综述
2017-03-07 11:28:13钱小斌孙霄峰张秀凤
重庆交通大学学报(自然科学版) 2017年2期
钱小斌,尹 勇,孙霄峰,张秀凤
(大连海事大学 航海动态仿真和控制实验室,辽宁 大连 116026)
船舶动力定位模拟器综述
钱小斌,尹 勇,孙霄峰,张秀凤
(大连海事大学 航海动态仿真和控制实验室,辽宁 大连 116026)
动力定位模拟器是一种介于理论研究和实际应用的闭环控制仿真系统,其通过虚拟现实技术来模拟动力定位系统的功能和操作环境。动力定位模拟器主要用于动力定位操作员的培训,但国内尚未研制出自主知识产权的动力定位模拟器。通过对动力定位系统和动力定位模拟器的国内外研究现状进行了综述,列举了相关国际组织如英国航海学会、国际海洋工程承包商协会、挪威船级社等对DP模拟器用于培训和认证的具体规定,以及对DP模拟器的分类,并提出了一种动力定位模拟器的体系架构以及我国开发DP模拟器的可行途径。
船舶工程;动力定位模拟器;发展状况;性能标准;系统组成
根据国际海事组织(International Maritime Organization, IMO)和挪威船级社(Det Norske Veritas, DNV)的相关定义,动力定位(dynamic positioning, DP)系统是指动力定位船舶需要装备的全部设备,包括动力系统、推进系统、动力定位控制系统[1-2]。动力定位系统通过测量系统得到船舶当前状态与期望状态的偏差,从而控制系统再根据环境外力的影响计算出所需的推力大小,最终由推进系统产生的推力来克服风、浪、流等海洋环境的扰动,使船舶保持或到达指定位置。而船舶动力定位模拟器是通过虚拟现实技术来模拟动力定位系统运行的整个过程,以及系统的操作环境。
DP模拟器已广泛用于动力定位操作员的培训与评估,以及与科研相关的理论试验、工程开发等项目。目前国内尚未研制出具有自主知识产权、且功能完善的动力定位模拟器,主要依赖于国外进口,因此自主研发动力定位模拟器是十分必要的。笔者通过对动力定位系统和动力定位模拟器的国内外研究现状进行了论述,列举了相关国际组织对DP模拟器用于培训和认证的具体规定,以及对DP模拟器的分类,并提出了一种动力定位模拟器的体系架构以及我国开发DP模拟器的可行途径。
1 动力定位系统的研究现状
动力定位系统最初应用于深海油气开采。1961年,钻井船Cuss1配备有4个可操舵的螺旋桨,尝试钻第一个Moho井,保持船舶在加利福尼亚948 m水深的海面上。壳牌公司在同一年下水了钻井船Eureka,该船拥有第一个DP模拟信号控制系统,是一艘真正意义上的动力定位船舶[3]。这一时期的DP系统也是第一代动力定位产品,采用经典控制理论来设计控制器,通常采用常规的PID〔proportion(比例)、integration(积分)、differentiation(微分)〕控制规律,同时为避免响应高频运动,采用低通或点通滤波器剔除偏差信号中的高频成分[4]。但滤波器的引入会导致误差信号的相位滞后,从而影响信号的稳定性。
20世纪70年代中叶,J.G.BALCHEN等[5]提出了一种以现代控制理论为基础的控制技术,即多变量的线性最优控制和卡尔曼滤波理论相结合的动力定位控制方法,从而产生了第二代也是应用比较广泛的动力定位系统。随后不少研究者对该方法进行了改进和扩展[6-11]。S.SAELID等[6]提出了使用频率自适应算法,以克服恶劣海况下船舶突然进入缓慢振荡运动;P.FUNG等[7]提出了自校正卡尔曼滤波器算法,使系统能够自动适应不同的海况环境;T.I.FOSSEN[8]考虑到推进器产生的力和力矩的延迟问题,同时在控制器的设计过程中引入积分环节,以克服均值不为零的外界环境扰动。
2001年,Kongsberg公司将非线性模型预测控制技术成功地引入到动力定位系统中,可有效减少燃料消耗和温室气体的排放,这标志着智能控制技术开始实际应用于动力定位系统中,使动力定位控制进一步向智能化的方向发展[12]。智能控制技术在动力定位系统的应用研究已成为了一个研究热点[13-18]。T.I.FOSSEN等[13]提出了非线性反馈控制器的设计方法并设计了非线性观测器,使用矢量后推法和李亚普诺夫稳定性理论证明了全局指数稳定;W.J.CHANG等[16]采用非线性反馈控制器设计工具,设计了基于Takagi-Sugeno模型的非线性模糊控制器,仿真实验验证了所设计控制器的有效性;T.D.NGUYEN等[17]研究了从平静到恶劣的变化海况条件下动力定位混合控制,采用多输出PID和带有位置和加速度测量装置的加速反馈控制器,数值仿真和水池船模试验表明其性能优于传统的波频滤波器和PID控制器;E.A.TANNURI等[18]设计了非线性滑膜控制器,其控制参数易于调节,且在变化的外部环境和载重条件下,其鲁棒性优于传统的PID控制。
动力定位船舶在冰区中作业已成为一个新的研究方向。围绕欧洲研究和发展项目“冰区动力定位”(dynamic positioning in ice, DYPIC),Ø.K.KJERSTAD等[19]对一艘1∶30的北极钻井船模在破碎浮冰环境下进行了冰载荷水池试验,对获得的试验数据进行了分析。分析结果表明:船舶在低速运动时的平均冰载荷与相对碰撞角度有关,与冰块的相对漂移速度无关;平均冰载荷的标准差与浮冰尺寸大小,密集度和厚度相关。2015年4月,装有芬兰Navis工程公司的动力定位系统和自动驾驶仪的应急救援破冰船“Baltika”号在喀拉海进行了北极冰区搜救海试,海试结果达到了预期的性能效果[20]。
国内自20世纪70年代开始研究动力定位技术,但大多数研究单位尚处于理论研究或试验研究阶段。哈尔滨工程大学自1983年开始研究船舶动力定位技术,并在1997年成功研制了我国第一套装备水面的动力定位系统[21]。在国家和有关海洋石油公司等方面的支持下,上海交通大学进行了一系列动力定位系统原创性自主研发,目前己取得了阶段性成果。2009年5月,船舶动力系统国家工程实验室获国家发展改革委批准,实验室建成后将成为我国船舶配套系统第一个国家工程实验室[22]。同年8月,由中国船舶工业集团公司708研究所首次成功设计了世界最先进的DP-3级动力定位系统,获得了中国船级社和美国船级社的认可,并通过了故障模式与影响分析的全面验证[23]。2014年10月,哈尔滨工程大学牵头研发的“DP3动力定位系统研制”项目通过了工信部验收[24]。
近年来,国内相关研究人员不断追踪国际研究热点,在理论研究中进行了不断创新,使用多种控制方法设计观测和控制器,如模糊控制[25],后推法鲁棒控制[26]、自适应滑模无源观测器[27]、非线性模型预测控制[28]、鲁棒自适应神经网络控制[29]等。此外,国内对动力定位技术研究的科研单位和院校还有武汉理工大学[30]、广东工业大学[31]、大连海事大学[32]、江苏科技大学[33]等。
2 动力定位模拟器的研究现状
动力定位模拟器是航海模拟器的一种。我国的相关单位相继开发了多种型号的航海模拟器,这些单位可以借鉴国际DP模拟器的开发经验开发有自主知识产权的DP模拟器[34-37]。
大多数动力定位厂商开发的人机交互设备含有“模拟器”的运行模式或者独立的训练机,可用于操作员的试操作和培训,这也是动力定位模拟器的早期产品。随着动力定位操作员培训需求的增加,国际上航海模拟器厂家如Kongsberg公司、Transas公司等相继开发了功能相对完善的动力定位模拟器。如今,国外对动力定位模拟器的研究开发已经较为成熟,大多以商品化为主,多用于动力定位操作员的培训。表1列举了目前国外获得DNV模拟器A级认证的动力定位模拟器[38],其中挪威Kongsberg公司在国际动力定位模拟器市场占主要地位。

表1 国外动力定位模拟器产品
而国内尚未研制出具有自主知识产权的动力定位模拟器,主要依赖于国外进口。2013年,大连海事大学从芬兰Navis工程公司进口了动力定位模拟器。2015年4月25日,由上海海事大学与英国C-MAR集团联合举办的上海海事大学-动力定位中心揭牌仪式在上海海事大学港湾校区举行。这是国内高校首个通过英国航海学会(nautical institute, NI)的培训机构资质认证和授权的动力定位中心。
3 国际组织的相关规定及分类
由于使用DP模拟器进行培训具有低成本、安全和高效等优点,DP模拟器越来越受到人们的关注。相关国际组织对DP模拟器用于培训和认证也制定了具体的规定,研究动力定位模拟器必须考虑这些规定和要求。
3.1 英国航海学会
英国航海学会是目前全球唯一受理颁发动力定位操作员证书的权威机构。其发布的“动力定位操作员培训和认证计划”(dynamic positioning operator’s training and certification scheme)详细规定了DP操作员的培训、评估以及证书的获取,该计划规定的内容是所有动力定位培训机构制定培训课程的主要依据。该计划的第2部分关于“动力定位离岸培训计划”将“DP模拟课程”作为获取证书的第3阶段的课程,从而说明了使用DP模拟器进行培训是强制性的,其中关于培训方面的内容规定如下[39]。
“模拟器(高级)课程主要涉及模拟的DP操作,包括错误、故障和失效,使参与者能够有机会将初级课程和60d的海上DP熟悉学会的知识应用到该阶段课程中。其覆盖下列内容:①DP系统实际操作;②DP操作;③DP报警,警报和应急程序。”
3.2 国际海洋工程承包商协会
国际海洋工程承包商协会(IMCA)是拥有300多名会员的海洋工程领域的国际知名组织。该组织提供在健康与安全、技术、质量与效率、环境保护等方面建立最高的可行标准,在全球范围内为该行业提供培训、证书、竞争力及招聘等框架结构。IMCA制定一系列与动力定位系统相关的技术标准,而其2006年制定的“动力定位关键人员培训和实践”是动力定位模拟器性能认证标准的主要依据[40]。此外,IMCA还发布了“模拟器的使用指南”,主要描述了如何在海洋工程领域使用模拟器培训[41]。其中的第4章“海洋承包行业模拟器的使用”规定:“模拟器的使用可进行培训人员的可衡量评估。此外,模拟器可用于工作计划或任务计划的目的,包括工程开发、程序开发、技术评估、研究、以及资产风险评估。”
3.3 挪威船级社
国际著名船级社挪威船级社(DNV)2007年10月公布了“航海模拟器系统认证标准”(standard for certification No.2.14 maritime simulator systems october 2007)[42],首次将动力定位模拟器纳入其航海模拟器认证体系中。标准根据物理真实感、行为真实感、操作环境、模拟器控制设备、故障模式以及其它模拟器控制功能等6个方面将DP模拟器分为4个等级,即A级、B级、C级、S级,A级为最高级别。2011年1月DNV又对上述做了修改[43],但内容基本保持一致。
该“标准”将不同等级的模拟器定义如下:A级模拟器是指全功能的动力定位模拟器,在逼真和设备齐全的船舶驾驶台环境中能够模拟动力定位操作,包括近海设施的视景呈现;B级模拟器指的是多任务动力定位模拟器,在逼真和完善的装有动力定位的驾驶台环境下能够模拟动力定位操作,不包括视景呈现;C级模拟器是有限任务动力定位模拟器,用于设备或盲的动力定位操纵和船位保持,模拟器至少包括一个动力定位控制器和监视器;S级模拟器是特殊用途的动力定位模拟器,具有模拟特殊动力定位设备操作和/或维修,和/或明确的动力定位操作。
4 体系架构及工作原理
4.1 系统组成与工作原理
动力定位模拟器系统由一个教练员站和若干个本船组成,各个本船可置于独立的房间,以达到封闭的仿真环境。系统的构成如图1。
教练员站主要用于控制各个本船的运行,以及教师对学员进行教学和讲评,由教师机、网络服务器、本船视景监控终端、DP机操作界面监控终端、闭路电视视频监控、投影仪和打印机等组成。教师机主要用于制作、编辑各种练习,以及控制系统的运行;网络服务器将来自不同设备的信息按预设的协议转发给其它设备;视景监控终端是给教练员/教师一个直观显示各个本船的三维场景;DP机操作界面监控终端用于显示各个本船DP机的当前界面,并能随时操控该本船的DP系统。闭路电视视频监控用于观察学员的操作情况和本船的运行状况。
本船由DP机、电子海图机、雷达模拟器、视景系统、报警机、望远镜、船用通讯设备、传感器、仪表以及控制面板等模拟设备组成。DP机显示船舶的运行状态以及控制并解算船舶的位置和航向;电子海图机显示当前海域的地理信息和船舶周边目标;雷达模拟器模拟船舶周边的雷达回波图像;视景系统实时显示船舶的运动姿态和海洋环境的三维场景。各个仿真设备既相对独立运行,又相互通信进行交换数据。
与船舶操纵模拟器相比,DP机是DP模拟器特有的设备,其本身是一种闭环的控制系统,内部原理如图2所示。DP机将船舶位置和航向的“实际值”根据信号产生的原理转化为不同传感器数据格式的“多源值”,以用于外接设备显示,同时将“多源值”通过数据融合处理和滤波估计,得到低频“估算值”。控制器将“估算值”与“期望值”的偏差计算出所需的推力,通过推力分配得到各个推进器的推力。同时DP机将从教练员站接收的海洋环境参数计算出实际的环境扰动,并通过解算六自由度的船舶运动数学模型得到船位和航向的“实际值”。
因此,DP模拟器可在船舶操纵模拟器的基础上增加DP系统单元,主要关键技术为六自由度的船舶运动数学模型、数据处理与滤波技术、动力定位控制算法、推力分配算法、三维视景显示技术、计算机网络技术、DP故障与评估模型等[44- 45](图1,图2)。

图1 动力定位模拟器系统组成Fig.1 System components of dynamic positioning simulator

图2 动力定位仿真单元的原理Fig.2 Principle of dynamic positioning simulation unit
4.2 数学模型与控制算法
由上述原理可知,船舶动力定位模拟器是一个典型的闭环控制仿真系统。其闭环的特性主要体现在船舶运动数学模型和动力定位控制算法所形成的闭环回路,构成了整个模拟器的核心模块。包括视景系统、电子海图系统、雷达以及相关的传感器等提供实时的船舶运动姿态、推进器状态、控制模式等工况信息。
船舶运动数学模型是在考虑仿真实时性的前提下,通过机理建模的方式模拟动力定位船舶在海上遭遇风浪流等环境扰动条件下的运动姿态,可分为分离型模型和整体型模型[46- 49]。在建立船舶运动数学模型过程中,需引入惯性坐标系和随船运动坐标系(图3);式(1)为由Fossen提出的非线性六自由度船舶运动数学模型[50-51]。
(1)
τthr+τmoor+τrud+τwind+τwave+τice
(2)
式中:η表示船舶的纵移x、横移y、垂荡z、横摇φ、纵摇θ、艏摇ψ;v表示船舶的运动速度和角速度;J表示旋转矩阵;M表示含有附加质量的惯性矩阵;CRB和CA分别表示刚体和附加质量的科氏向心力矩阵;D表示阻尼矩阵;G表示由浮力和重力引起的回复力和力矩;τthr,τmoor,τrud分别表示船舶推进器、锚链和舵等产生的力和力矩;τwind,τwave,τice分别表示外界环境如风、波浪和冰等对船舶运动造成的扰动力和力矩。
动力定位控制系统则根据船舶的主要运动特性来控制船舶的运动。控制系统对水面船舶的运动控制主要针对纵移、横移和艏摇,忽略垂荡、横摇和纵摇,即对水平面3自由度的控制(图3)。而由于动力定位系统过驱动的特点,在工程设计中采用控制器设计和推力分配算法分离的思想。目前,虽然研究人员们热衷于研究新的控制算法,但离实际工程应用仍有一定的距离,现今大多数动力定位产品的控制器设计仍采用PID控制或现代控制理论,其中非线性PID控制规律可进行如下描述[52]。
(3)

推力分配算法是将控制器所产生的虚拟控制力进行优化分配,得到各个推进器的转向α和转速u指令,与控制力的关系为[53-54]:
τc=T(α)f=T(α)Ku
(4)
式中:f表示推进器的推力;T(α)表示推进器布置矩阵;K表示推力系数。
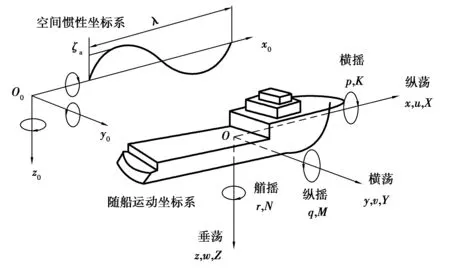
图3 随船坐标系和惯性坐标系Fig.3 Body-fixed and earth-fixed reference frames
5 结 语
随着动力定位系统在我国海洋工程行业的广泛应用,动力定位操作员的需求也将迅速增加。作为动力定位操作员资质培训和认证的必要条件,动力定位模拟器的研究也越来越受重视。目前,国内对动力定位模拟器的研究还处于理论研究阶段,主要集中在船舶运动数学模型、控制算法、三维图形技术等方面。
笔者针对动力定位系统和动力定位模拟器的国内外研究现状,列举了相关国际组织对DP模拟器用于培训和认证的具体规定,以及对DP模拟器的分类,并提出了一种动力定位模拟器的体系架构以及我国开发DP模拟器的可行途径,并简述了相关数学模型和控制算法。国内相关单位可结合现有的研究成果,并通过引进和消化吸收国外先进理论和技术,开展动力定位模拟器相关的船舶运动模型、信号模拟、数据处理和滤波、控制算法、推力分配算法、三维可视化等主要关键技术的研究工作,自主研制出达到国际先进水平的动力定位模拟器。
[1] International Maritime Organization Maritime Safety Committee.AmendmentstotheGuidelinesforVesselwithDynamicPositioning(DP)Systems:MSC/Circ.645[S]. London: International Maritime Organization, 1994.
[2] Det Norske Veritas.RulesforClassificationofShipsNewbuildingsDynamicPositioningSystem[S]. Norway: DNV Press, 2010.
[3] 摩根M J.近海船舶的动力定位[M].耿惠彬,译.北京:国防工业出版社,1984:3-10. MORGAN M J.DynamicPositioningofOffshoreVessels[M]. GENG Huibin, translate. Beijing: National Defence Industry Press, 1984: 3-10.
[4] SORENSEN A J. A survey of dynamic positioning control systems[J].AnnualReviewsinControl, 2011, 35(1): 123-136.
[5] BALCHEN J G, JENSSEN N A, MATHISEN E, et al. A dynamic positioning system based on Kalman filtering and optimal control[J].ModelingIdentification&Control, 1980, 1(3): 135-163.
[6] SAELID S, JENSSEN N, BALCHEN J. Design and analysis of a dynamic positioning system based on Kalman filtering and optimal control[J].IEEETransactionsonAutomaticControl, 1983, 28(3): 331-339.
[7] FUNG P, GRIMBLE M J. Dynamic ship positioning using a self-tuning Kalman filter[J].IEEETransactiononAutomaticControl, 1983: 28(3): 339-350.
[8] FOSSEN T I.GuidanceandControlofOceanVehicles[M]. UK: John Wiley and Sons, 1994: 307-320.
[9] TANNURI E A, DONHA D C. H∞controller design for dynamic positioning of turret moored FPSO[C]// 5thIFACConferenceonManoeuvringandControlofMarineCraft. Aalborg, Denmark, 2000.
[10] PEREZ T, DONAIRE A. Constrained control design for dynamic positioning of marine vehicles with control allocation[J].Modelling,IdentificationandControl, 2009, 30(2): 57-70.
[11] FOSSEN T I, PEREZ T. Kalman filtering for positioning and heading control of ships and offshore rigs[J].IEEEControlSystems, 2009, 29(6): 32- 46.
[12] 边信黔,付明玉,王元慧.船舶动力定位[M].北京:科学出版社,2011:2-10. BIAN Xinqian, FU Mingyu, WANG Yuanhui.ShipDynamicPositioning[M]. Beijing: Science Press, 2011: 2-10.
[13] FOSSEN T I, GROVLEN A. Nonlinear output feedback control of dynamically positioned ships using vectorial observer backstepping[J].IEEETransactionsonControlSystemsTechnology, 1998, 6(1): 121-128.
[14] FOSSEN T I, STRAND J P. Passive nonlinear observer design for ships using Lyapunov methods: experimental results with a supply vessel[J].Automatica, 1999, 35(1): 3-16.
[15] STRAND J P.NonlinearPositionControlSystemsDesignforMarineVessels[D]. Trondheim, Norway: Norwegian University of Science and Technology, 1999.
[16] CHANG W J, CHEN G J, YEH Y L. Fuzzy control of dynamic positioning systems for ships[J].JournalofMarineScienceandTechnology, 2002, 10(1): 47-53.
[17] NGUYEN T D, SφRENSEN A J, QUEK S T. Design of hybrid controller for dynamic positioning from calm to extreme sea conditions[J].Automatica, 2007, 43(5): 768-785.
[18] TANNURI E A, AGOSTINHO A C, MORISHITA H M, et al. Dynamic positioning systems: an experimental analysis of sliding mode control[J].ControlEngineeringPractice, 2010, 18(10): 1121-1132.
[19] KJERSTADφK, METRIKIN I, LφSET S, et al. Experimental and phenomenological investigation of dynamic positioning in managed ice[J].ColdRegionsScienceandTechnology, 2015, 111: 67-79.
[20] NAVIS Engineering.BaltikaIceTrialsMarkDPFirst[EB/OL].(2015-05-13)[2015-08-21].http://www.navisincontrol.com/baltika-ice-trials-mark- dynamic-positioning-first/.
[21] 施小成.ROV工作母船动力定位控制系统研究[D].哈尔滨:哈尔滨工程大学,2001. SHI Xiaocheng.ResearchonDynamicPositioningControlSystemforROVSupportShip[D]. Harbin: Harbin Engineering University, 2001.
[22] 潘戌蕙.船舶动力国家工程实验室获批[N].中国船舶报,2009-05-13(001). PAN Xuhui. National engineering laboratory for ship power was approved[N].ChinaShippingReport, 2009-05-13(001).
[23] 张银炎,周丙辉.我国设计成功DP-3动力定位系统[N].中国船舶报,2009-8-14(006). ZHANG Yinyan, ZHOU Binghui. DP-3 dynamic positioning system designed successfully in China[N].ChinaShippingReport, 2009-08-14(006).
[24] 孙明泉,张士英.DP3船舶动力定位系统自主研制成功[N].光明日报,2014-10-22(006). SUN Mingquan, ZHANG Shiying. DP3 ship dynamic positioning system independent research and development[N].GuangmingDaily, 2014-10-22(006).
[25] 李和贵,翁正新,施颂椒.基于模糊控制的船舶动力定位系统设计与仿真[J].系统工程与电子技术,2002,23(11):42- 44. LI Hegui, WENG Zhengxin, SHI Songjiao. Design and simulation of ship dynamic positioning systems based on fuzzy control[J].SystemsEngineeringandElectronics, 2002, 23(11): 42- 44.
[26] 朱康武,顾临怡.作业型遥控水下运载器的多变量backstepping鲁棒控制[J].控制理论与应用,2011,28(10):1441-1446. ZHU Kangwu, GU Linyi. Multivariable backstepping robust control for work-class remotely operated vehicle[J].ControlTheory&Applications, 2011, 28(10): 1441-1446.
[27] 谢文博,付明玉,施小成.动力定位船舶自适应滑模无源观测器设计[J].控制理论与应用,2013,30(1):131-136. XIE Wenbo, FU Mingyu, SHI Xiaocheng. Adaptive sliding-mode passive observer design for dynamic positioning vessel[J].ControlTheory&Applications, 2013, 30(1): 131-136.
[28] 王元慧,隋玉峰,吴静.基于非线性模型预测的船舶动力定位控制器设计[J].哈尔滨工程大学学报,2013,34(1):110-115. WANG Yuanhui, SUI Yufeng, WU Jing. Marine dynamic position system based on nonlinear model predictive control[J].JournalofHarbinEngineeringUniversity, 2013, 34(1): 110-115.
[29] DU Jialu, YANG Yang, WANG Dianhui, et al. A robust adaptive neural networks controller for maritime dynamic positioning system[J].Neurocomputing, 2013, 110:128-136.
[30] 刘芙蓉.半潜船动力定位控制系统建模和仿真研究[D].武汉:武汉理工大学,2011. LIU Furong.ResearchonModelingandSimulatingofDynamicPositioningControlSystemoftheSemi-SubmersibleVessel[D]. Wuhan: Wuhan University of Technology, 2011.
[31] 徐荣华.船舶动力定位系统建模与随机控制研究[D].广州:广东工业大学,2011. XU Ronghua.StudyonModelingandStochasticControlofShip’sDynamicPositioningSystem[D]. Guangzhou: Guangdong University of Technology, 2011.
[32] 杨扬.动力定位船舶非线性自适应控制研究[D].大连:大连海事大学,2013. YANG Yang.ResearchonNonlinearAdaptiveControlforDynamicPositioningShips[D]. Dalian: Dalian Maritime University, 2013.
[33] 袁伟,陈红卫,俞孟蕻.船舶动力定位系统虚拟仿真实验平台[J].实验室研究与探索,2015,34(4):68-71. YUAN Wei, CHEN Hongwei, YU Menghong. Virtual simulation platform for ship dynamic positioning system[J].ResearchanExplorationinLaboratory, 2015, 34(4): 68-71.
[34] 贾欣乐,杨盐生.船舶运动数学模型——机理建模与辨识建模[M].大连:大连海事大学出版社,1999:6-7. JIA Xinle, YANG Yansheng.MathematicalModelofShipMotion:MechanismModelingandIdentificationModeling[M]. Dalian: Dalian Maritime University Press, 1999: 6-7.
[35] 金一丞,尹勇.STCW公约与航海模拟器的发展[J].大连海事大学学报,2002,28(3):51-55. JIN Yicheng, YIN Yong. STCW convention and the development of marine simulator[J].JournalofDalianMaritimeUniversity, 2002, 28(3): 51-55.
[36] 赵士涛.船舶系离泊操纵中缆绳作业过程的仿真[D].大连:大连海事大学,2013. ZHAO Shitao.ResearchonSimulationofHeavingLine’sOperationWhileBerthingandUnberthing[D]. Dalian: Dalian Maritime University, 2013.
[37] 张克青.立体显示设备在航海模拟器中的应用研究[D].大连:大连海事大学,2013. ZHANG Keqing.StudyofStereoscopicDisplayDeviceAppliedinMarineSimulator[D]. Dalian: Dalian Maritime University, 2013.
[38] Det Norske Veritas.SimulatorsbyTypeofCertificate[M]. Norway: DNV Press, 2014.
[39] Nautical Institute.DynamicPositioningOperator’sTrainingandCertificationScheme[M]. UK: Nautical Institute, 2014.
[40] International Marine Contractors Association.TheTrainingandExperienceofKeyDPPersonnel[M]. UK: IMCA, 2006.
[41] International Marine Contractors Association.GuidanceontheUseofSimulators[M]. Rev ed. UK: IMCA, 2012.
[42] Det Norske Veritas.StandardforCertificationNo2.14MaritimeSimulatorSystemsOctober2007[S]. Norway: DNV Press, 2007.
[43] Det Norske Veritas.StandardforCertificationNo2.14MaritimeSimulatorSystemsJanuary2011[S]. Norway: DNV Press, 2011.
[44] 任鸿翔,余曹荣.JUE-75C Inmarsat-C船站系统仿真与智能评估[J].重庆交通大学学报(自然科学版),2016,35(5):146-150. REN Hongxiang, YU Caorong. Simulation and intelligent assessment of marine JUE-75C inmarsat-C system[J].JournalofChongqingJiaotongUniversity(NaturalScience), 2016, 35(5): 146-150.
[45] 谭家万,袁浩.一种基于证据理论和前景理论的船舶综合安全评估方法[J].重庆交通大学学报(自然科学版),2015,34(5):126-129. TAN Jiawan, YUAN Hao. Ship formal safety assessment method based on evidence theory and prospect theory[J].JournalofChongqingJiaotongUniversity(NaturalScience), 2015, 34(5): 126-129.
[46] 贾欣乐,杨盐生.船舶运动数学模型[M].大连:大连海事大学出版社,1999:49-207. JIA Xinle, YANG Yansheng.MathematicalModelofShipMotion[M]. Dalian: Dalian Maritime University, 1999: 49-207.
[47] 张秀凤,尹勇,金一丞.规则波中船舶运动六自由度数学模型[J].交通运输工程学报,2007,7(3):40- 43. ZHANG Xiufeng, YIN Yong, JIN Yicheng. Ship motion mathematical model with six degrees of freedom in regular wave[J].JournalofTrafficandTransportationEngineering, 2007, 7(3): 40- 43.
[48] ABKOWITZ M A. Measurement of hydrodynamic characteristics from ship manoeuvring trails by system identification[J].Maneuverability, 1980(10): 27-30.
[49] 浜本剛實.MMG報告-Ⅱ 操縦性数学モデルの理論背景[J].日本造船学会誌, 1977(577):192-198. HAMAMOTO Takami. Theoretical background of the mathematical model and control MMG report II[J].JournalofJapaneseSocietyofShipbuilding, 1977(577): 192-198.
[50] PEREZ T, FOSSEN T I. Kinematic models for manoeuvring and seakeeping of marine vessels[J].ModelingIdentification&Control, 2007, 28(1): 19-30.
[51] FOSSEN T I.HandbookofMarineCraftHydrodynamicsandMotionControl[M]. Hoboken, State of New Jersey: A John Wiley & Sons, Ltd. Publication, 2011: 109-132.
[52] SKJETNE R.TheManeuveringProblem[D]. Norwegian: Norwegian University of Science and Technology, 2005: 143-151.
[53] RUTH E, SMOGELIφN, PEREZ T, et al. Antispin thrust allocation for marine vessels[J].IEEETransactiononControlSystemsTechnology, 2009, 17(6): 1257-1269.
[54] PEREZ T, DONAIRE A. Constrained control design for dynamic positioning of marine vehicles with control allocation[J].ModellingIdentificationandControl, 2009, 30(2): 57-70.
(责任编辑 刘 韬)
Overview of Ship Dynamic Positioning Simulator
QIAN Xiaobin, YIN Yong, SUN Xiaofeng, ZHANG Xiufeng
(Key Laboratory of Maritime Simulation and Control, Dalian Maritime University, Dalian 116026, Liaoning, P.R.China)
Dynamic Positioning simulator is a closed-loop control simulation system between theoretical research and practical application, which simulates the function and operating environment of dynamic positioning system by Virtual Reality technology. DP simulator is mainly used for the training of dynamic positioning operator and there is no domestic DP simulator with independent intellectual property rights. The components and working principle of DP simulator is analyzed herein and the key technologies of DP simulator are summarized. The development history of DP system and DP simulator are reviewed. The specific provisions are introduced regarding DP simulator operator training and certification carried out by the relevant international organizations such as NI, IMCA, and DNV and DP classifications are presented. Finally the system framework of one type of DP simulatior is presented and together with the feasibility of domestic DP simulators development are explored.
ship engineering; dynamic positioning simulator; development; performance standards; system components
10.3969/j.issn.1674-0696.2017.02.19
2015-08-22;
2016-01-14
国家“863”课题项目(2015AQA016404);中央高校基本科研业务费专项资金项目(313204330);海洋公益性行业科研专项基金项目(201505017-4)
钱小斌(1989—),男,浙江绍兴人,博士研究生,主要从事交通信息工程与控制、航海仿真、虚拟技术方面的研究。E-mail:qianxiaobin0617@126.com。
U666.158
A
1674-0696(2017)02- 108- 07
猜你喜欢
中学生数理化·七年级数学人教版(2021年10期)2021-11-22 07:53:08
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
船舶(2021年4期)2021-09-07 17:32:22
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
故事作文·高年级(2017年10期)2017-10-19 15:30:59
中国船检(2017年3期)2017-05-18 11:33:09
小学阅读指南·低年级版(2016年1期)2016-09-10 07:22:44
