六旋翼植保无人机模糊自适应PID控制
2017-03-06 03:36李永伟王红飞
河北科技大学学报 2017年1期
李永伟,王红飞
(河北科技大学电气工程学院,河北石家庄 050018)
e={NB NM NS ZO PS PM PB},
,
kP={NB NM NS ZO PS PM PB},
kD={NB NM NS ZO PS PM PB},
kI={NB NM NS ZO PS PM PB}。
六旋翼植保无人机模糊自适应PID控制
李永伟,王红飞
(河北科技大学电气工程学院,河北石家庄 050018)
六旋翼植保无人机在作业过程中自身载荷变化将引起飞行控制性能下降、抗扰动能力降低等问题。为了提高六旋翼植保无人机的可控性,通过对六旋翼植保无人机在喷洒农药过程中进行分析和建模,推导出植保无人机时变动力学模型,提出了一种模糊自适应PID控制算法,模糊自适应PID算法适应性强,参数整定简单,提高了系统动态响应和稳态性能。将各个传感器的测量参数输入到模糊自适应PID算法中,可以得到对应的控制量,实现飞行器稳定运行。通过使用Matlab软件对飞行系统进行仿真,并结合实验平台实际飞行控制表明,系统的动态性能和稳定性得到了有效提高。
自动控制理论;模糊PID;植保无人机;飞行控制;飞行器建模
李永伟, 王红飞.六旋翼植保无人机模糊自适应PID控制[J].河北科技大学学报,2017,38(1):59-65. LI Yongwei, WANG Hongfei.Fuzzy adaptive PID control for six rotor eppo UAV [J].Journal of Hebei University of Science and Technology,2017,38(1):59-65.
六旋翼植保无人机是一种典型的多变量欠驱动时变系统,且系统具有强耦合性的特点[1-3]。植保无人机与其他无人飞行器有很多不同点,植保无人机的主要特点是靠近地面低空飞行,并且无人机在喷散农药作业时,很容易受到地面地势的变化、局部气流的变化、电池电量变化和自身质量变化的影响。国外已经将无人机广泛应用于农作物保护,并展开相关研究[4]。国内无人机在农业领域应用较晚而且存在很多技术问题,但也在加快推进农业自动化进程,逐步缩小与西方发达国家的差距[5]。旋翼型无人机大多采用传统PID控制算法,当植保无人机质量发生变化时,传统PID算法很容易使系统产生震荡,导致飞行器偏离稳态。本文采用一种基于模糊自适应PID控制算法,可以在六旋翼植保无人机系统模型的参数发生变化时,实时调节PID参数,有效提高了六旋翼植保无人机的飞行性能。
1 六旋翼植保无人机的动力学模型

图1 六旋翼植保无人机模型
Fig.1 Six rotor eppo UAV model
六旋翼植保无人机具有类似正六边形的对称结构,其简化模型见图1。其中B为机体坐标系;E为大地坐标系;姿态角φ,θ,ψ分别表示植保无人机的滚转角、俯仰角、偏航角;Fi(i=1,2,…,6)为植保无人机旋翼产生的升力。6个旋桨均匀分布在机体上,机体中心正下方为长方形药箱,5个喷嘴均匀的分布在直线喷杆下方。在理想条件下,药箱被设计成长方体容器,药箱视为随时间减少的固体。无人机在喷药过程中液体质量会逐渐减小,引起植保无人机质量、转动惯量和加速度等参数变化。
六旋翼植保无人机的Euler-Newton动力学模型与动力学公式为[6-8]
(1)
(2)
式中:ms为无人机的质量,m0为药箱装满时无人机整体的质量,其值为ms=m0-vmt,vm为质量减少的速度;x,y,z为机体对地位移;Ix,Iy,Iz为以x,y,z轴的转动惯量,具体为Ix=Ix0+Ix1,Iy=Iy0+Iy1,Iz=Iz0+Iz1,其中Ix0,Iy0,Iz0为机体的转动惯量,Ix1,Iy1,Iz1为药箱的转动惯量且随时间变化而变化;Ωr为螺旋桨旋转产生的陀螺效应分量;Ωi为螺旋桨的转速;Ki为阻力系数;g为重力加速度;Jr为螺旋桨移动惯量,kg·m2;l为力臂。
假设药液在减少过程中系统质心不变,对药箱进行建模[9-11],可以推导出其转动惯量公式为
(3)
(4)
(5)
式中:ρ为药液的密度;v为药液面下降的速度;a为药箱的长;b为药箱的宽;h为药箱的高。六旋翼植保无人机升力F和转矩Mφ,Mθ,Mψ为
(6)
式中:l为力臂;ba为空气动力学参数;k为阻力参数。
通过以上建模分析可以看出,六旋翼植保无人机系统是一种具有时变性、耦合性和不确定性的模型,所以传统的PID算法对系统的镇定效果并不明显。
2 模糊自适应PID控制器的设计
2.1 模糊自适应PID控制器结构
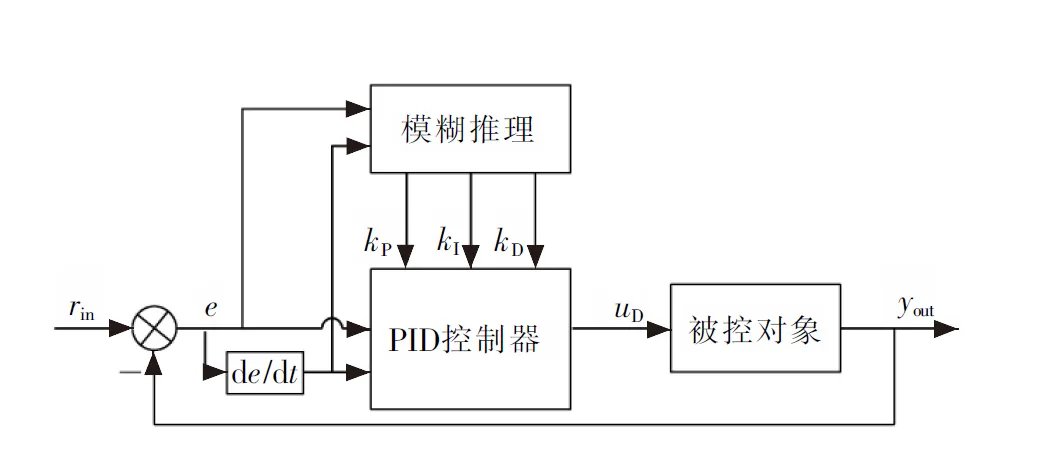
图2 系统结构方框图
Fig.2 System fuzzy controller structure


2.2 PID参数整定
当系统的误差为较大值时,表明系统与目标状态误差较大,应取较大的kP值,加快系统响应速度;应选取较小的kD值,防止系统出现过大的超调量,产生剧烈震荡;应将kI的值设定为零,以去掉积分项,防止积分出现饱和现象。
当系统的误差e为中等值时,应取较小的kP值,以减弱响应速度;应选取恰当的kD值,降低对系统响应作用的强度;同时可以选取较小的kI值,但是不能过大。
(2)国有企业和有限责任公司从业人员多。2017年河北省持证矿山企业中国有企业从业人员7.55万人,有限责任公司从业人员4.90万人,分别占矿山企业总量的40.13%、26.04%。显示出国有企业和有限责任公司从业人员多、其他企业类型的从业人员数量与占比较少的特点。
2.3 隶属度函数与模糊推理规则
根据系统实际情况,设模糊控制器各语言变量的论域为[15-19]
e={NBNMNSZOPSPMPB},

kP={NBNMNSZOPSPMPB},
kD={NB NM NS ZO PS PM PB},
kI={NBNMNSZOPSPMPB}。
上式的论域中,论域值分为7类,分别为NB表示负大;NM表示负中;NS表示负小;ZO表示零;PS表示正小;PM表示正中;PB表示正大。根据相关隶属度函数,可以确定出kP,kI和kD模糊控制规则和相应值。
3 仿真研究
在Matlab2014a软件中对六旋翼植保无人机的模糊自适应PID控制系统进行了仿真,根据实际测试结果制定好模糊推理规则,可以得到最优的模糊控制表,结合式(1)—式(5)得到模糊PID控制系统动态仿真基础,在Matlab/Simulink中建立六旋翼植保无人机的动力学模型,并且加入模糊PID控制器和传统的PID控制器进行对比。系统仿真运行的计算机平台的CUP为Inteli5 3.2GHz, 运行内存为4GB。表1为六旋翼植保无人机仿真的具体参数,表2为六旋翼植保无人机的模糊规则数值表。

表1 六旋翼植保无人机仿真参数数值表
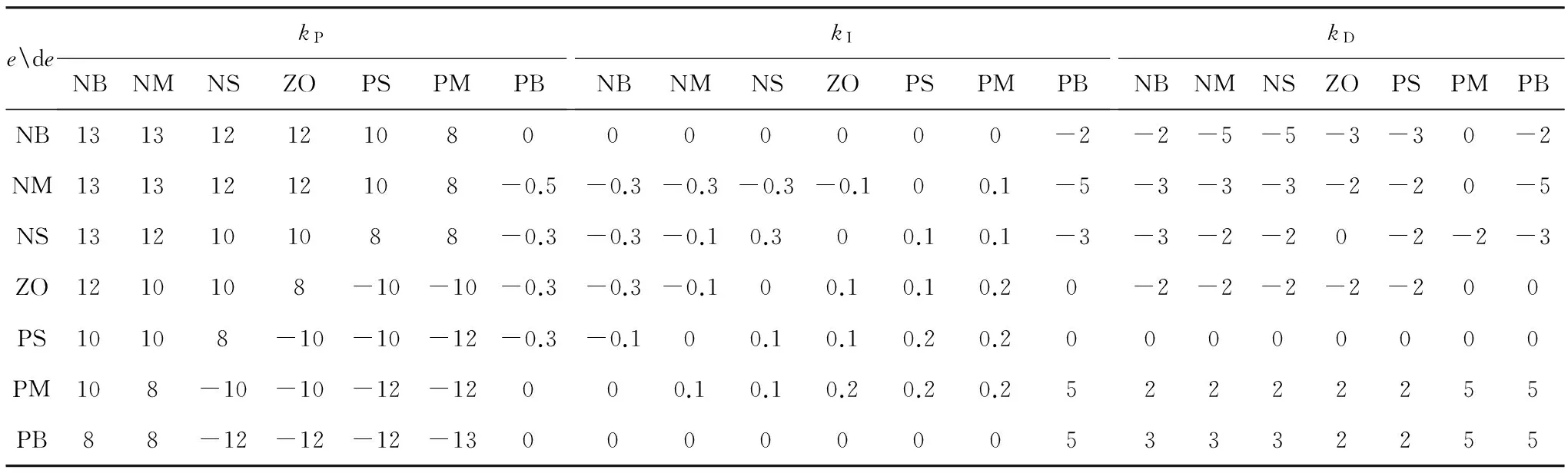
表2 模糊规则数值表
图3为六旋翼植保无人机在俯仰角、偏航角和滚转角3个方向上的响应曲线,其中以俯仰角响应为例,通过系统的阶跃响应和周期阶跃测试可以看出,系统延迟时间112 ms,上升时间603 ms,系统超调量1.78,系统峰值时间920 ms,调节时间1 020 ms。系统进入稳定区间稳态误差在2.34%左右,符合理论上3%~5%的误差允许范围。

图3 系统的阶跃响应
Fig.3 Step response of the system
系统在正阶跃和负阶跃信号的测试过程中,表明基于模糊自适应PID控制的方法具有很好的周期性和重复性,同时对于系统时变的扰动具有较强的鲁棒性。系统响应性迅速,整个上升时间仅约为0.6 s。
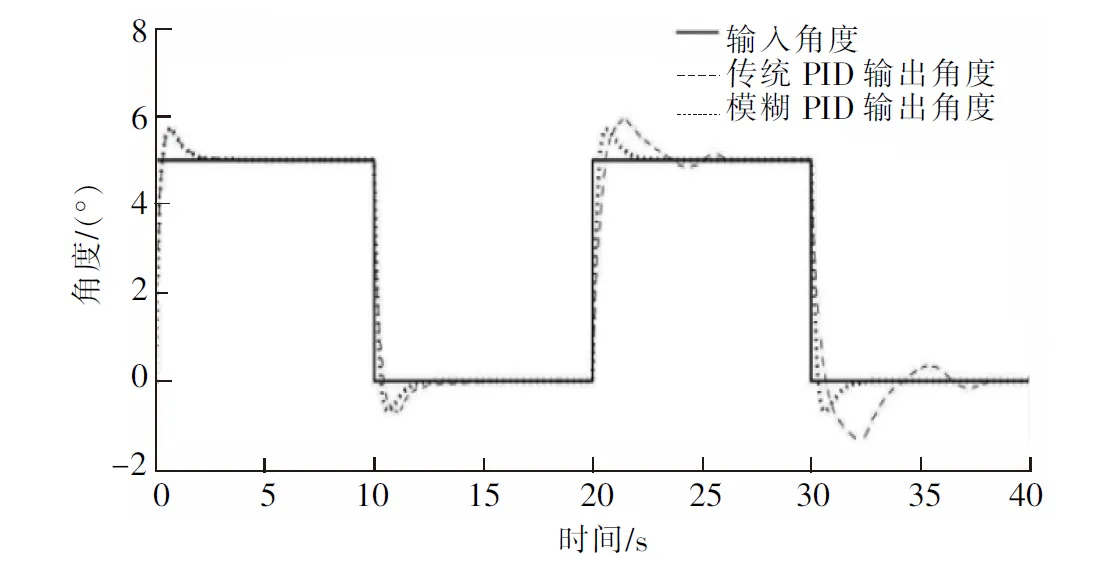
图4 模糊控制系统与传统PID控制系统的阶跃响应比较
Fig.4 Comparison of traditional PID control and fuzzy control
模糊自适应PID控制方法具有鲁棒性强和适应性高的特点。模糊自适应PID适用于解决运动控制中存在的非线性、强耦合、时变性、滞后等问题。另外,模糊自适应PID控制器具有较强的容错能力,对受控对象动力学本身特征变化和环境特征变化具有较强的应变能力。与神经网络和遗传算法等智能控制相比,模糊自适应PID运算简单,查表迅速快捷,模糊条件语句容易加到控制环节上,更加适用嵌入式控制器,具有较强的应用性。
4 实验研究
实验平台由六旋翼植保无人机机架1副、MPU6050传感器、HCM5883L传感器、STM32处理器以及电机等动力组件组成,其框图见图5。其中MPU6050传感器提供飞行器三轴加速度数据和三轴陀螺仪数据,HCM5883L传感器提供三轴地磁场数据,STM32处理器用于采集数据和运行模糊自适应PID算法。六旋翼植保无人机实物图见图6。
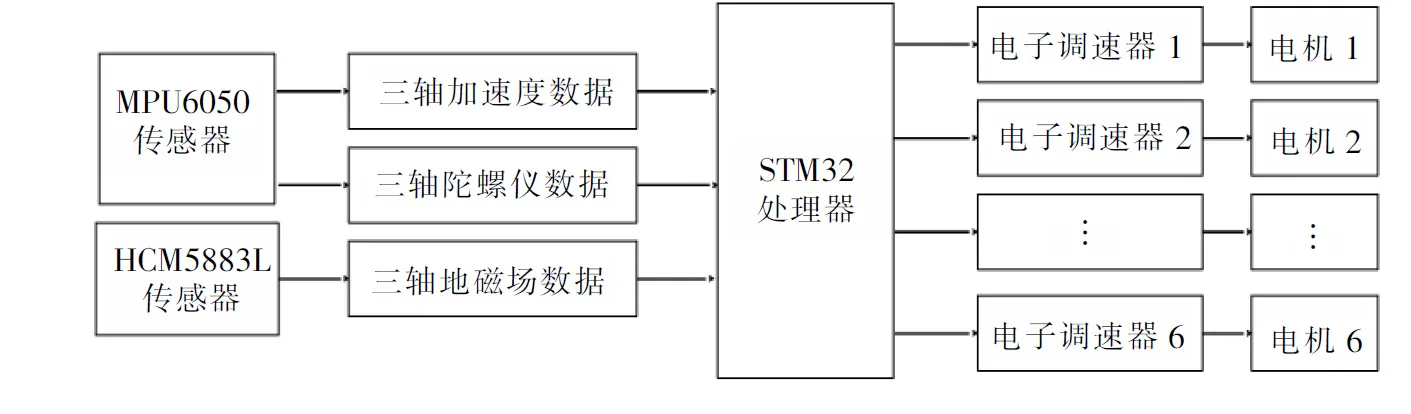
图5 实验平台组成框图
Fig.5 Experimental platform block diagram

图6 六旋翼植保无人机实物图
Fig.6 Picture of six rotor eppo UAV
图7为六旋翼植保无人机在平稳飞行过程中俯仰角与水平面的误差。实验每隔5 ms对飞行器姿态采样一次,一共采样240 000个数据点,共飞行20 min。可以看出,无人机实际飞行过程中,与水平面的误差基本稳定在0°附近,最大误差为-1°,平均误差为0.102 3°。图8为误差分布直方图,可以看出,误差分布整体服从正态分布,较小的误差主要分布在-0.1°~+0.1°之间,较大的误差分布在两侧,且数量较少。图9和图10为在实验过程中药箱质量的变化和电池电压的变化。
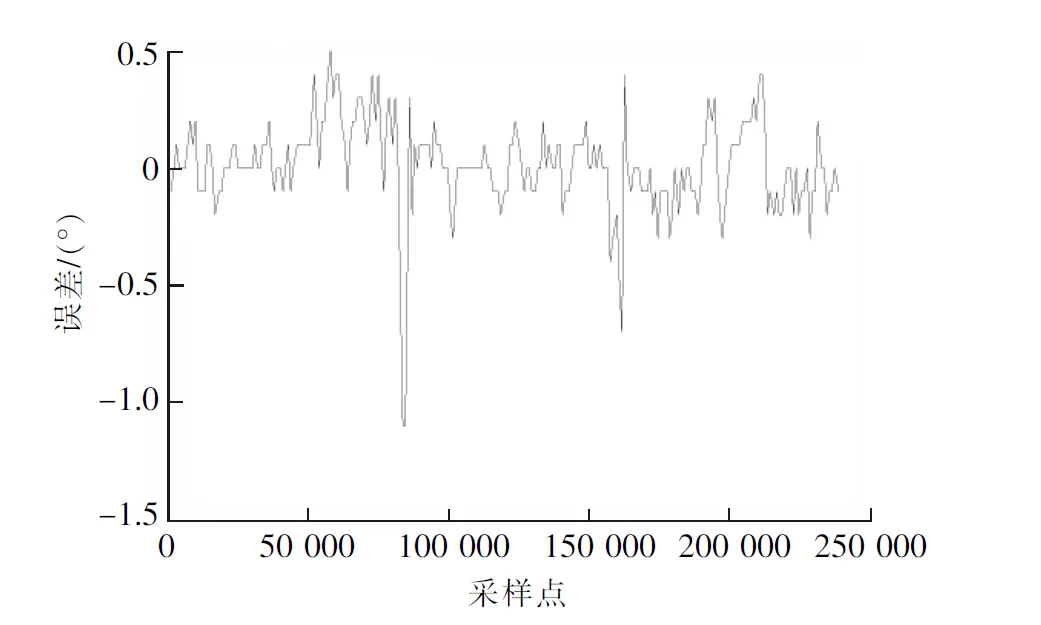
图7 六旋翼植保无人机俯仰角的误差曲线
Fig.7 Six rotor eppo UAV pitch error curve

图8 误差分布直方图
Fig.8 Error distribution histogram

图9 药箱质量变化曲线
Fig.9 Curve of cartridge quality
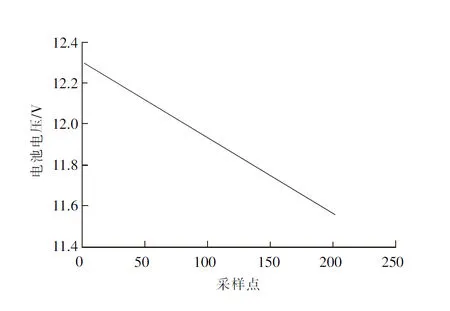
图10 电池电压变化曲线
Fig.10 Curve of the voltage
通过实物制作,完成了六旋翼植保无人机的姿态控制和平稳飞行,验证了算法的可行性,实验结果表明:在无人机自身质量不断变化、电池电量持续降低的情况下,系统仍具有良好的鲁棒性和稳定性。
表3展示了传统PID[20]与模糊自适应PID相关性能参数进行的比较,可见,模糊自适应PID控制方式与传统PID控制方式具有明显优势,具有更加好的鲁棒性和稳定性。

表3 传统PID与模糊自适应PID性能参数比较
5 结 语
针对六旋翼植保无人机在实际作业中存在着扰动和参数变化等问题,构建了植保无人机的动力学模型,提出了模糊自适应PID算法,并针对无人机进行了参数的整定和系统仿真。通过嵌入式系统构建了六旋翼植保无人机的实验平台,验证了模糊自适应PID控制算法的可行性。通过Matlab仿真研究和实验平台实际飞行控制表明:用于六旋翼植保无人机的模糊自适应PID算法,使系统的鲁棒性和稳定性得到了有效提高。但是,植保无人机在实际测试过程中,偶然会出现不稳定现象,还需要对植保无人机的硬件平台和软件算法进行优化,以达到更好的飞行效果。
/References:
[1] LIU P,CHEN A Y, HUANG Y N, et al. A review of rotor-craft unmanned aerial vehicle(UAV)developments and applications in civil engineering[J]. Smart Structures and Systems, 2013,13(4): 1065-1094.
[2] RAFFO G V, ORTEGA M G, RUBIO F R. An integral predictive/nonlinearcontrol structure for a quadrotor helicopter[J].Automatica, 2010, 46:29-39.
[3] WANG Peng, LI Yuren, FU Longfei,et al. A fuzzy control of aircraft anti-skid braking system using EKF(extend kalman filter estimation)[J]. Journal of Northwestern Polytechnical University, 2015, 33(3): 479-483.
[4] KIRK I W. Measurement and prediction of atomization parameters from fixed-wing aircraft apray nozzless[J]. Transactions of the ASABE, 2007,50(3):693-703.
[5] 何雄奎. 改变我国植保机械和施药技术严重落后的现状[J]. 农业工程学报, 2004, 20(1):13-15. HE Xiongkui. Improving severe draggling actuality of plant protection machinery and its application techniques[J]. Transactions of the Chinese Society of Agricultural Engineering, 2004,20(1):13-15.
[6] 王大伟,高席丰.植保无人机药箱建模与姿态控制器设计[J].排灌机械工程学报, 2015,33(11):1006-1012. WANG Dawei, GAO Xifeng. Liquid tank modelling and attitude controller design of plant protection UAV[J]. Journal of Drainage and Irrigation Machinery Engineering,2015,33(11): 1006-1012.
[7] 孟佳东,赵志刚. 小型四旋翼无人机建模与控制仿真[J]. 兰州交通大学学报,2013, 32(1): 63-67. MENG Jiadong, ZHAO Zhigang. Modeling and simulation of microquadrotor UAV[J]. Journal of Lanzhou Jiaotong University, 2013,32(1): 63-67.
[8] 吴成富, 刘小齐, 马松辉. 四旋翼无人机建模及其四元数控制律设计[J].飞行力学, 2013,31(2): 122-125. WU Chengfu, LIU Xiaoqi, MA Songhui. Modeling and control for a quadrotor UAV based on quaternion[J]. Flight Dynamics, 2013,31(2): 122-125.
[9] 仇成群, 刘成林, 沈法华,等. 基于Matlab和模糊PID的汽车巡航控制系统设计[J]. 农业工程学报, 2012,28(6): 197-202. QIU Chengqun, LIU Chenglin, SHEN Fahua, et al. Design of automobile cruise control system based on Matlab and fuzzy PID[J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(6): 197-202.
[10]吕安涛, 毛恩荣, 宋正河,等. 一种拖拉机自动驾驶复合模糊控制方法[J]. 农业机械学报, 2006, 37(4): 17-20. LYU Antao, MAO Enrong, SONG Zhenghe,et al. A complex fuzzy control technique of tractor automatic steering[J].Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(4):17-20.
[11]刘金坤. 先进PID控制MATLAB仿真[M].北京:电子工业出版社, 2011.
[12]窦景欣, 孔祥希, 闻邦椿. 四旋翼无人机模糊自抗扰姿态控制及稳定性分析[J]. 中国惯性技术学报, 2015, 23(6):824-830. DOU Jingxin, KONG Xiangxi, WEN Bangchun. Attitude fuzzy active disturbance rejection controller design of quadrotor UAV and its stability analysis[J].Journal of Chinese Inertial Technology,2015, 23(6): 824-830.
[13]廖懿华, 张铁民, 廖贻泳. 基于模糊-比例积分偏差修正的多旋翼飞行器姿态测算系统[J]. 农业工程学报, 2014,30(20): 19-27. LIAO Yihua, ZHANG Tiemin, LIAO Yiyong. Multi-rotor aircraft attitude detection system based on fuzzy-proportion integration deviation correction[J]. Transactions of the Chinese Society of Agricultural Engineering,2014, 30(20): 19-27.
[14]张爱华, 倪建飞. 基于模糊自适应 PID 的单轴转台控制系统[J]. 黑龙江科技大学学报, 2015, 25(3): 333-339. ZHANG Aihua, NI Jianfei. Uniaxial turntable control system based on fuzzy self- adaptive PID[J]. Journal of Heilongjiang University of Science & Technology,2015, 25(3): 333-339.
[15]王史春. 四旋翼飞行器PID优化控制[J].河北科技大学学报,2013,34(5):457-486. WANG Shichun. Optimal PID control for the four-rotor quadrotor[J]. Journal of Hebei University of Science and Technology, 2013,34(5):457-486.
[16]王军, 韩建兵, 付占稳,等. 基于模糊 PID 控制的过程控制实验系统的研究[J]. 河北科技大学学报, 2005, 26(2):150-152. WANG Jun, HAN Jianbing, FU Zhanwen, et al. Study of process control experiment based on Fuzzy PID control[J].Journal of Hebei University of Science and Technology,2005, 26(2): 150-152.
[17]韩兵欣, 刘利贤, 李永伟. 基于 PLC 的模糊 PID 控制器在调速系统中的应用[J]. 河北科技大学学报,2004,25(4):51-53. HANG Bingxin, LIU Lixian, LI Yongwei. PID fuzzy controller on PLC application in the velocity systems[J].Journal of Hebei Univer-sity of Science and Technology,2004, 25(4): 51-53.
[18]赵旭,赵立蕊,连翠玲.基于嵌入式系统的多功能自理床控制系统[J]. 河北工业科技,2016,33(2):178-182. ZHAO Xu, ZHAO Lirui, LIAN Cuiling. Multifunctional self-care bed control system based on embedded system[J]. Hebei Journal of Industrial Science and Technology,2016,33(2):178-182.
[19]刘东辉,奚乐乐,牛孟然,等.坐式垂直起降无人机的一种姿态解算算法的设计[J].河北科技大学学报, 2016,37(1):47-51. LIU Donghui, XI Lele,NIU Mengran,et al. Design of attitude solution algorithm for tail-sitter VTOL UAV[J]. Journal of Hebei University of Science and Technology,2016,37(1):47-51.
[20]李俊, 李运堂. 四旋翼飞行器的动力学建模及PID控制[J]. 辽宁工程技术大学学报(自然科学版), 2012,31(1): 114-117. LI Jun, LI Yuntang. Modeling and PID control for a quadrotor[J]. Journal of Liaoning Technical University (Natural Science), 2012,31(1): 114-117.
Fuzzy adaptive PID control for six rotor eppo UAV
LI Yongwei, WANG Hongfei
(School of Electrical Engineering, Hebei University of Science and Technology, Shijiazhuang, Hebei 050018, China)
Six rotor eppo drones's load change itself in the job process will reduce the aircraft flight control performance and make the resistance to environmental disturbance being poor. In order to improve the six rotor eppo unmanned aerial vehicle (UAV) control performance, the UAV in the process of spraying pesticide is analyzed and the model is constructed, then the eppo UAV time-varying dynamics mathematical model is deduced, and a fuzzy adaptive PID control algorithm is proposed. Fuzzy adaptive PID algorithm has good adaptability and the parameter setting is simple, which improves the system dynamic response and steady state performance, realizing the stability of the six rotor eppo UAV flight. With measured parameters of each sensor input in to the fuzzy adaptive PID algorithm, the corresponding control quality is obtained, and the stable operation of aircraft is realized. Through using Matlab to simulate the flight system and combining the practical experiments, it shows that the dynamic performance and stability of the system is improved effetively.
automatic control theory; fuzzy PID; the eppo UAV; flight control; vehicle modeling
1008-1542(2017)01-0059-07
10.7535/hbkd.2017yx01010
2016-09-27;
2016-12-01;责任编辑:陈书欣
河北省自然科学基金(2014208145);河北省研究生创新资助项目基金(冀学位[2016]3号文件)
李永伟(1958—),男,河北沧州人,教授,主要从事智能控制方面的研究。
E-mail:0599li@163.com
TP273;V249.121
A
猜你喜欢
今日农业(2021年17期)2021-11-26
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
今日农业(2020年18期)2020-10-27
小哥白尼(野生动物)(2020年5期)2020-09-24
湖北农机化(2020年4期)2020-07-24
少年漫画(艺术创想)(2019年7期)2019-11-25
电子制作(2019年9期)2019-05-30
新农业(2017年2期)2017-11-06
北京航空航天大学学报(2016年8期)2016-11-16