
基于激光传感器的稻种轮廓形状测量方法研究*
2017-03-02 07:03:06尹文庆吴林华杨志军
传感器与微系统 2017年3期
曹 鹏, 尹文庆, 吴林华, 王 川, 范 丽, 杨志军
(南京农业大学 工学院 江苏省农业智能化装备重点实验室,江苏 南京 210031)
基于激光传感器的稻种轮廓形状测量方法研究*
曹 鹏, 尹文庆, 吴林华, 王 川, 范 丽, 杨志军
(南京农业大学 工学院 江苏省农业智能化装备重点实验室,江苏 南京 210031)
稻种轮廓形状测量是稻种基于形状特征识别的前提条件。以激光传感器采集到的稻种表面点云为基础,提出了一种基于主平面剖视图投影的稻种轮廓形状测量方法。通过主成份分析法校正点云模型的坐标系,利用主平面投影法获取稻种的六视图投影模型,应用Alpha Shape算法提取投影点云模型的边缘轮廓,并计算稻种投影模型的周长、面积、长、宽、长宽比、最大半径、最小半径、半径比、圆形度等9个形状特征参数。选取大华香糯、豫粳6号、新稻10号3大类,每种各200粒稻种作为试验样品,采用径向基函数(RBF)神经网络模型对提取到的形状特征进行训练识别,识别率分别达到96 %,94 %,98 %。结果表明: 基于激光传感器的稻种轮廓形状测量方法能够较好地适用到稻种识别中。
激光传感器; 稻种; 无损检测; 点云; 径向基函数神经网络
0 引 言
水稻是我国主要粮食作物,优良的稻种其增产作用是显著的,但是在稻种中经常参杂着其他劣质种子,稻种纯度降低,导致产量降低,因此,需要准确地检测出稻种的纯度,保证水稻的稳产高产。
常用的检测技术有光谱技术[1~3]、电子鼻技术[4~6]、机器视觉技术[7~9]和核磁共振技术[10,11]等,通过检测目标物体的形状、颜色、表面纹理及缺陷等特征,对目标物体进行品质检测及分类识别,检测过程可分为特征提取和模式识别两部分,其中,特征值的可靠性和精确度决定了后期检测的效果,因此,特征提取方法在整个检测过程中至关重要。
形状特征是稻种最重要的特征之一。国内外提出了多种稻种形状特征提取方法,如傅里叶描述子、不变矩、链码及其相关技术,大多基于机器视觉的原理,测量稻种的三维形状特征。本文提出基于激光传感器的稻种三维形状测量方法,以激光传感器采集到的稻种点云为基础,在对稻种点云模型进行坐标系标准化、模型投影及投影点云轮廓提取等预处理后,计算投影轮廓形状特征参数,实现对稻种三维形状特征的测量,为后期稻种品种的分类识别提供可靠的特征数据源。
1 系统结构与原理
1.1 激光三角测量法原理
采用激光三角法测量原理,利用具有规则几何形状的激光源投影到稻种表面,在安置于空间某一位置的图像传感器上成像,按照三角形几何关系(图1所示),即可测出被测点的空间坐标。h是物面上光点P相对于基准面的高度,α是激光线与成像光轴的夹角,Lo是透镜的物距,Li是透镜的像距,O′,P′分别是O,P的像点。

图1 激光三角法原理
根据透镜成像原理,P的相对于基准面的高度为
(1)
式中 Lo,Li,α为系统参数,是固定的值,这样可以由h′计算出h的值。
1.2 三维激光扫描系统
采用的激光扫描测量系统由控制模块和测量模块组成,控制模块包括计算机、插在计算机主板上的图像采集卡和运动控制卡,测量模块包括驱动器、伺服电机、测量头(CCD摄像机、半导体激光发生器),如图2。扫描精度为±0.01mm。图3(b)为扫描得到的一颗新稻10号稻种样品点云。

图2 激光扫描系统
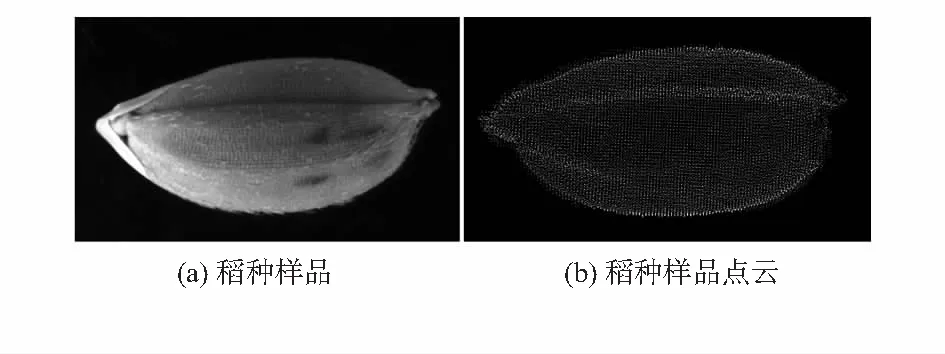
图3 稻种样品
2 点云预处理
为了提取稻种点云模型的三维形状特征值,先对点云模型进行预处理。预处理流程包括:坐标系标准化、模型投影、投影轮廓提取。
2.1 坐标系标准化
通过激光扫描仪采集到的稻种点云模型的坐标系各不相同,为了保证三维模型特征的有效性,提取的特征应具有平移和旋转变换不变性,需要对模型进行标准化处理。首先计算出三维模型的重心坐标,将其平移到坐标系的原点,然后利用主成份分析法对三维模型进行旋转变换[12],从而保证各个点云模型的坐标系标准化。
2.2 模型投影
在稻种点云模型坐标系标准化后,模型的位置、方向已经一致。通过采用主平面剖视图投影法来获取三维模型的二维投影图像[13],即将稻种三维模型分别沿着三个主平面剖切,并将剖切部分投影到各自的剖切面上,得到稻种的六个剖视图投影点云模型,如图4(a)~(f)所示。
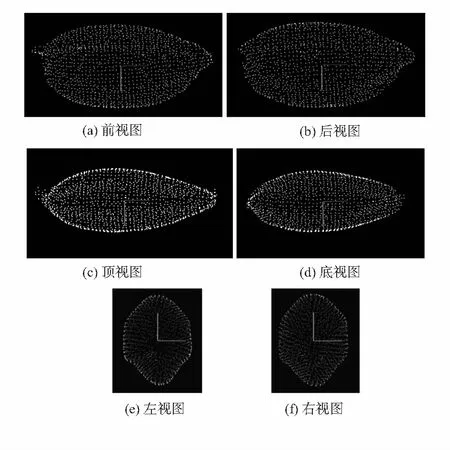
图4 投影点云
2.3 投影轮廓提取
稻种的投影模型是不规则的凹包点集,通过采用基于Alpha Shape的种子点轮廓提取算法[14],提取六视图上投影点云模型的边缘轮廓。如图5(a)~(f)所示。
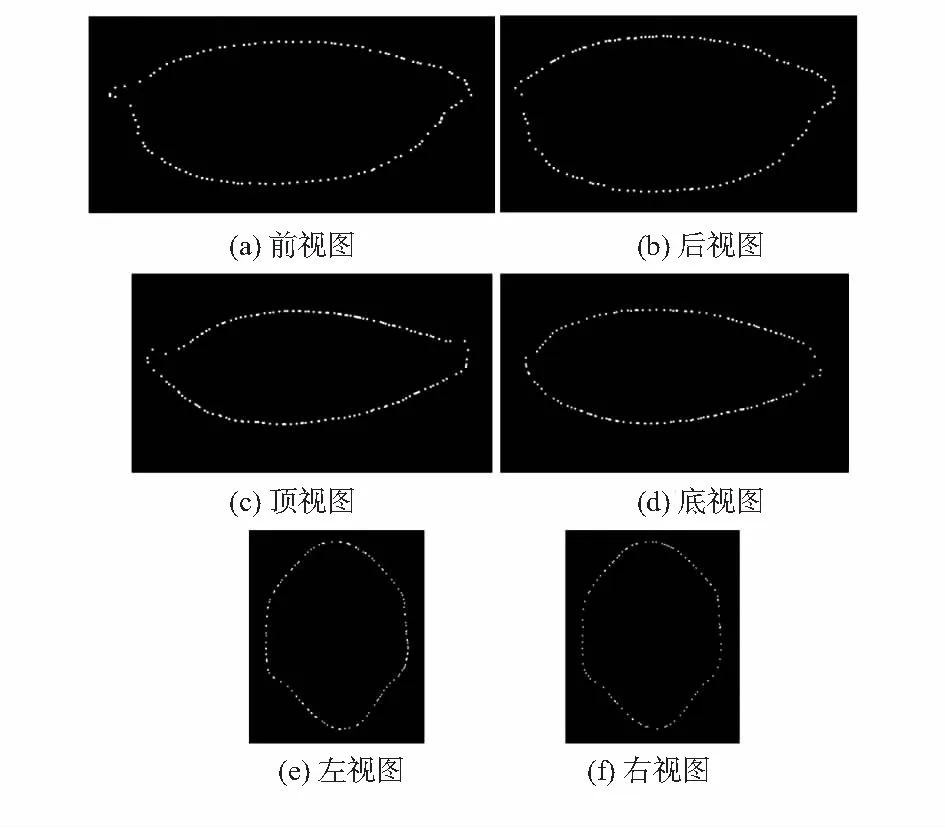
图5 投影点云轮廓
3 特征提取
稻种的形状特征是用于区分稻种品种最基本的特征之一。通过之前稻种点云模型的预处理,可进一步对它进行几何特征测量。根据稻谷种子的个体特点,提取稻种的周长、面积、长轴长、短轴长、长宽比、最大半径、最小半径、半径比、圆形度等9个特征参数。
3.1 周长C
区域的周长就是区域的边界轮廓线长度,它能够有效地区别简单形状与复杂形状的物体。稻谷种子在YOZ平面上的投影轮廓线如图6所示。采用边界法来计算周长,通过边缘轮廓点提取,计算相邻边界轮廓点的距离之和,即为区域的周长,用符号C表示。

图6 投影点云轮廓线
3.2 面积S
通过引入轮廓外一点,构建矢量三角形来计算稻种区域的面积。假设投影点云模型为凹包点集Ui,包含点A(x1,y1),B(x2,y2),C(x3,y3),D(x4,y4),E(x5,y5),F(x6,y6),G(x7,y7),引入凹包点集外一点P(xp,yp),如图7所示。

图7 凹包示意图
由距离公式和海伦公式可得S△PAB,S△PBC,S△PCD,S△PDE,S△PEF,S△PFG,S△PGA,则凹包面积为
S=|S△PAB+S△PBC+S△PCD-S△PDE-S△PEF-S△PFG-
S△PGA|
(2)
式中 S为凹包点集Ui的面积,即投影点云模型的面积。
3.3 长L、宽W、长宽比CLW
稻谷种子的长和宽并没有统一的定义说明,将稻谷种子边缘轮廓上两端点之间的最大距离作为稻种的长,稻谷种子的宽是长轴中点的垂线在种子边缘上的截距。稻谷种子的长宽比CLW是种子图像中长L与宽W的比值。稻谷种子的长、宽如图8(a)所示。

图8 稻谷种子的长、宽和半径示意图
3.4 最大半径RMA、最小半径RMI、半径比CR
最大半径RMA、最小半径RMI分别是指从质心v到边界的最大距离和最小距离,而最大半径与最小半径的比值CR通常用来度量目标对象的偏心率或者伸长度,它们都是识别目标对象十分重要的几何特征。图8(b)所示是稻谷种子的半径示意图。
3.5 圆形度γ
圆形度在一定程度上描述了区域的紧凑性,它没有量纲,由面积和周长计算得到。其数学表达式为
(3)
式中 γ为圆形度,C为稻谷种子的周长,S为稻谷种子区域的面积。一个连续区域为圆形时γ为1,当区域为其它形状时γ大于1。
4 结果与分析
为了验证上述分形特征对不同稻种品种的识别效果,采用径向基函数(RBF)神经网络模型对稻谷种子进行分类识别实验。选取大华香糯、豫粳6号、新稻10号3大类每类各200粒稻谷种子(总共600粒)作为试验样品,利用上述方法测得每个稻谷种子的周长C、面积S、长L、宽W、长宽比CLW、最大半径RMA、最小半径RMI、半径比CR和圆形度γ等9个特征参数,每个品种选用其中150粒作为样本训练网络,另外50粒作为测试样本对网络进行测试。输入层节点数设置为9,隐藏层节点数设置为19,输出层节点数设置为1,测试结果如表1所示。

表1 测试数据的识别效果
从表1中可以看出,3个品种的试验检测中,新稻10号的识别率最高,达到98 %,豫粳6号的识别率最低,为94 %,整体的识别效果良好,说明通过激光传感器提取到的稻种三维形状特征能够较好的表征出稻种的真实形态。
5 结 论
1)利用激光扫描的高、精、准特性,提出了基于激光传感器的稻种三维形状测量方法,通过对采集到的稻谷种子表面点云模型进行位姿校准、模型投影、轮廓提取,计算出稻种的9个形状特征参数。
2)在大华香糯、豫粳6号、新稻10号3类稻种的分类识别中,识别率分别达到96%,94%,98%,验证了该方法的可行性和有效性。
[1] 柳晓飞,邓文怡,牛春晖,等.一种新型光谱共焦位移测量系统研究[J].传感器与微系统,2013,32(4):34-36,40.
[2] 钱 旭,程明霄,王雪花,等.基于红外光声光谱的气体检测系统设计[J].传感器与微系统,2014,33(12):98-100,103.
[3] 郑明杰.基于中红外光谱技术的非接触式气体识别电子鼻系统[J].传感器与微系统,2014,33(9):65-67.
[4] 黄小燕,赵向阳,方智勇.电子鼻在气体检测中的应用研究[J].传感器与微系统,2008,27(6):47-49,52.
[5] 庞旭欣,郑丽敏,朱 虹,等.电子鼻对不同存储时间纯牛奶的检测分析[J].传感器与微系统,2012,31(9):67-70.
[6] 高明星,王晓宁,龚 龑,等.电子鼻在棉织物异味检测中的应用研究[J].传感器与微系统,2011,30(6):33-35.
[7] 黎安兵,王宏涛,陈 琪,等.基于机器视觉的几何量精密测量系统[J].传感器与微系统,2009,28(4):99-101,120.
[8] 徐晋卿,陈唐龙,占 栋,等.基于机器视觉的钢轨轮廓测量方法研究[J].传感器与微系统,2014,33(4):27-30.
[9] 张 文,林建南,倪建彬,等.基于机器视觉的卷烟污点面积测量系统设计[J].传感器与微系统,2013,32(11):89-91,94.
[10] 杨占刚,徐 征,李洪兵,等.微型核磁共振传感器实时监测汽轮机油老化状态[J].传感器与微系统,2015,34(10):11-14.
[11] 方秀成,孙淑琴,王应吉,等.坑道水核磁共振探测激发磁场计算与测试方法研究[J].传感器与微系统,2015,34(6):50-57.
[12] 户鹏飞,迟鹤翔,刘宝华.算法和数学形态学理论在踝臂指数测量中的应用[J].传感器与微系统,2013,32(7):150-152.
[13] 赵仲孟,聂丽娜,张选平.基于二维投影点集的三维模型检索算法研究[J].微电子与计算机,2013,30(1):143-147.
[14] 陈 卓,马洪超,张 良.改进邻域结构与轮廓分析LiDAR点云立交桥提取[J].遥感学报,2013,17(5):1146-1157.
曹 鹏(1991- ),男,硕士,研究方向为智能检测。
Study of outline shape measurement method of rice seed based on laser sensor*
CAO Peng, YIN Wen-qing, WU Lin-hua, WANG Chuan, FAN Li , YANG Zhi-jun
(Key Laboratory of Intelligent Equipment for Agriculture of Jiangsu Province,College of Engineering,Nanjing Agricultural University,Nanjing 210031,China)
Outline shape measurement of rice seed is key to non-destructive testing of rice seed.On the basis of point cloud on rice seed surface acquired by laser sensor,present an outline shape measuring method of rice seed based on main plane of projection.By principal component analysis method,calibrate coordinate of point cloud model,obtain six main plane of projection of seed rice seed using principal plane projection method,apply Alpha Shape algorithm to extract edge outline of the projected point cloud model,and calculate nine shape feature parameters of perimeter,area,length,width,aspect ratio,maximum radius,minimum radius,radius ratio,circularity of rice seed projection model.Select three categories of rice seed,200 grain per each class as a test sample,using RBF neural network model for training recognition extracted shape feature,recognition rate reach 96 %,94 %,98 %,respectively.The results show that the outline shape measurement method of rice seed based on laser sensor can well be applied to identification of rice seed.
laser sensor; seed rice;non-destructive testing; point cloud; radial basis function(RBF)neural networks
10.13873/J.1000—9787(2017)03—0029—04
2016—04—12
江苏省农机三项工程项目(NJ2010—02);南京农业大学青年科技创新基金资助项目(KJ2010032)
TH 741
A
1000—9787(2017)03—0029—04
猜你喜欢
课堂内外·小学版(低年级)(2023年6期)2023-04-29 00:44:03
科教新报(2021年39期)2021-11-04 16:11:52
今日农业(2020年15期)2020-12-15 10:16:11
制造技术与机床(2019年11期)2019-12-04 05:50:54
安徽文学(2019年6期)2019-06-28 07:19:22
小学生导刊(2017年34期)2017-07-09 03:00:52
新农业(2016年14期)2016-08-16 03:33:00
计算机工程(2015年4期)2015-07-05 08:27:39
党建文汇·下(2014年10期)2014-10-27 13:07:02
现代营销·经营版(2013年10期)2013-05-14 14:55:07
