
室内移动机器人机器视觉定位系统的设计
2017-03-02 05:29栾禄祥
自动化仪表 2017年2期
栾禄祥
(辽宁省交通高等专科学校,辽宁 沈阳 110122)
室内移动机器人机器视觉定位系统的设计
栾禄祥
(辽宁省交通高等专科学校,辽宁 沈阳 110122)
采用以DSP+ARM微控制器为核心的嵌入式实时操作系统,设计了一种基于嵌入式系统和机器视觉定位的室内移动机器人。利用视觉导航图像处理技术、形态学方法和一种基于尺度空间理论的Harris角点检测方法,借助陀螺仪和加速度计的惯性导航技术进行地图的匹配定位,并按环境的变化情况更新地图以实现导航。基于超声波传感器设计了避障模块,实现了自主避障。设计了一种基于ZigBee技术的无线通信模块,实现了机器人的智能控制,增加了机器人之间以及机器人和服务器之间的信息交换。软件核心算法采用多传感器融合技术,将D-S理论和人工神经网路相结合;在非线性化系统中,利用BP神经网路多层前馈网络的反相传播学习方式,很好地实现了模式识别。与其他机器人系统相比,该系统具有独立操作性强、功能多样化、扩展性强等特点,克服了目前机器人存在的成本高、功耗大、实时性差和定位不准确的问题。
机器人; 智能控制; 嵌入式系统; 神经网络; 传感器; 视觉定位; 导航; 无线通信
0 引言
随着科学技术和人工智能技术的发展,一种以自主或半自主方式运行、为人类的生活提供服务的机器人正逐渐融入我们的生活。由于智能机器人具有完善的机电一体化系统,集中了控制工程、电子信息和传感技术等领域的优势,因此被广泛地应用在工业生产、远程医疗、娱乐生活和农业等领域。国内外也出现了各种功能的机器人,诸如根据环境自主变化的结构机器人、国际象棋之王——卡斯帕罗夫高智能机器人、新型实现面对面互动交流的呈现机器人——派宝等。但是目前的机器人也存在独立性差、功能单一、计算能力差、难以保证实时性等缺陷。
随着人类社会发展的需求,对各种机器人的性能要求也越来越高。为综合改善目前已有的技术和理论平台,提出了一种基于嵌入式系统和机器视觉定位的室内移动机器人系统,并对其定位导航、自主避障、无线通信等功能进行了设计。
1 系统设计
在硬件方面,主要采用主从结构的分布式处理方式,根据控制系统硬件结构和系统的功能需求,采用具有单片机化、体积小、功耗低、可靠性高、外设资源丰富的DSP作为处理平台的核心,协调控制各个子模块系统[1]。子模块中包括基于ARM处理机的驱动控制模块、基于超声波测距的自主避障模块、基于TMS320C5416的机器视觉信息处理模块和基于ZigBee技术的无线通信模块。各子模块采用低功耗、低成本、存储量大、可扩展性强、处理速度快的ARM处理机或DSP处理器,单独对相应模块的数据进行大量处理。而上位机负责小数据融合、分配任务指令和协调各子模块等工作,具有一定的可靠性和实时性。这种可高效运行的嵌入式设计结构增加了系统的稳定性,便于系统维护。
为了使机器人有足够长的续航时间,采用一种方便、快捷的USB充电方式,并借鉴自主式充电电路,使机器人在电量不足时能够回到充电地点自行充电,增加了灵活性与自动性。
系统结构如图1所示。

图1 系统结构图
在软件设计方面,本文结合了US/OS-II操作系统,采用了先进的图像处理技术、神经网络学习算法和多传感器信息融合算法。通过不断的学习,增加了机器人的适应性,使其在完全未知的环境下能够顺利运行。其软件实现方案如图2所示。

图2 软件实现方案示意图
2 驱动控制模块
目前,机器人常见的机械结构有轮式、履带式、双足式、复合式等。轮式机器人具有结构简单,灵活度高,控制方便、功耗低的优点。综合考虑成本、环境和机械性能等因素,本文设计了一种方便、易控、稳定、智能的两轮移动机器人,以满足室内定位和远程控制的要求。该设计主要基于ARM单片机和L298N驱动芯片的控制驱动模块。配合步进电机的使用,单片机输入的脉冲信号经过数模转换、脉冲调制、放大等电路控制电机的转速以及转向,能有效、实时地控制机器人的运行状态。该方式简单、灵活、稳定、易控制,且不会带来其他干扰。
3 导航与定位
导航与定位技术是实现机器人在外界环境中自主移动的主要技术。目前机器人有多种导航方式,因环境因素的不同可以分为磁导航、惯性导航、GPS导航、视觉导航、声音导航和神经网络导航等。磁导航的原理是通过电磁传感器对磁场的检测来感知路径信息。该方法抗干扰能力强、简单实用,但是成本高、灵活性和可维护性差、要依赖一定的平台,同时还存在线路铺设的问题。GPS导航是一种以空间卫星为基础的高精度导航系统,由于存在信号阻碍、多径干扰等缺点,不适用于室内导航。声音导航具有无方向性,时间分辨率高,但空间分辨率低。
对比以上的导航技术,本文主要采用视觉导航技术。视觉导航是主要通过摄像头拍摄图片并对图像进行处理以实现导航的方法。根据外界环境已知程度,可以采用环境地图匹配导航。信息量的完整性与准确性是视觉导航的绝对优势。而惯性导航借助陀螺仪和加速度计所测量到移动机器人的方位角和加速率以确定当前的位置,并根据先验地图规划移动机器人的路径,从而实现自主导航。本文利用惯性导航无需外界环境的优势,采用RBF网络和基于Elitist竞争机制的遗传方法,实现对光纤陀螺仪漂移误差模型的辨识[2]。该方法能够显著减少光纤陀螺的误差,提高移动机器人导航定位的精度,解决了光线很暗或者物体不在视野范围内时的机器人导航与定位问题。
3.1 硬件组成
视觉系统的硬件电路分为图像采集和视觉信息处理2部分。图像采集部分主要使用多自由度的CMOS摄像头和采集卡,实现自动跟踪和移动探测。与CCD摄像头相比,COMS摄像头具有信息读取方式简单、输出信息速率快、耗电少、体积小、质量轻、集成度高、价格低等特点,是未来数码相机的理想成像芯片。由于视觉导航存在信息数据计算量大、实时性较差等问题,本文采用运算速度快、存储丰富、功耗低的TI TMS320C5416作为处理系统,以提高运行与响应速度。
3.2 图像处理
为了保证系统的可靠性与实时性,本文采用快速优化的图像处理技术,对采集到的视觉图像进行处理[3]。
首先运用二值法对图像进行灰度级处理,然后使用迭代法阀值图像分割方法产生动态的阈值,对图像进行实时分割。分割后的图像会有噪声,本文采用图像干扰消去法,并建立数学形态学模型,以先腐蚀后膨胀运算的原则对图像进行特征提取和边缘检测,消除小物体,并在纤细点处分离物体,平滑较大物体边界,保持物体原有的面积,为图像重建与恢复打下基础。
利用传感器感知周围环境,结合图像区域标记法进行地图的构造与存储。构造过程使用了一种基于尺度空间理论的Harris角点检测方法[4],该方法能确保角点不受光照条件和摄像机姿态变化的影响。当机器人重新进入该区域时,会进行地图的匹配定位,并按环境的变化情况更新地图以实现导航。
图像处理软件流程如图3所示。
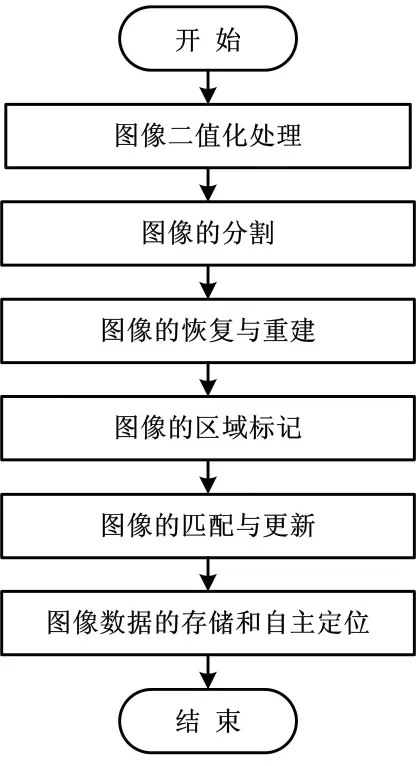
图3 图像处理软件流程图
3.3 基于超声波传感器的避障模块
为了完成机器人在自主移动过程中的自主避障功能,移动机器人需要实时、主动探测与障碍物之间的距离,以免碰撞。目前,常用的方法是基于红外传感器和超声波传感器进行测距。由于光电传感器易受光线、介质等环境因素的影响,所以红外模块采用直射式、反射式等收发方式的测距结果都不准确。因此,在设计避障模块时,采用了低成本的超声波检测模块[5]。与共振法和差频法相比,回波法是超声波测距较为常用的简易方法。选择由发射电路发射工作频率为40 kHz超声波,遇到障碍物反射后再经过放大装置返回到接收电路中,ARM通过测量超声脉冲从发出到接收的时间计算出机器人与障碍物之间的距离。
为了解决单一传感器所产生的方向性差等问题,本文采用多超声传感器和多传感器融合技术进行测距。同时,为了在复杂、未知的移动环境中预测出障碍物的位置,采用了具有很强容错性和鲁棒性的模糊控制算法,建立障碍物的位置和方向的模糊关系,并规划机器人的正确路径。由于超声波速与温度有关,故本文采用简单的ds18b20测温器件对外界环境中的温度进行感知,以补偿温度对超声波速的影响、实现测距的精确性和实时性[6]。超声波传感器的避障模块设计方案如图4所示。

图4 避障模块设计方案示意图
3.4 无线通信模块
为了实现对机器人的智能控制,增加机器人之间以及机器人和服务器之间的信息交换,设计了一种基于ZigBee技术的无线通信模块。与有线通信相比,该通信方式降低了线路铺设的成本,易于安装和维护。与传统的WiFi和蓝牙方式相比,该方案响应速度较快,具有低成本、低功耗、高安全、扩展空间大的优点,以及很强的组网能力。机器人之间的通信使用CC2430无线通信模块,其系统芯片满足2.4 GHz ISM波段应用的低成本、低功耗要求。每个芯片上都具有ZigBee射频前端、内存和微控制器,还包含了数模转换器、定时器和足够大的RAM[7]。
3.5 软件核心算法
多传感器信息融合解决了单一传感器获得信息量不完整和不准确的问题[8],它对多个传感器所提供的局部环境信息进行统一、集成处理,实现了信息的互补性和冗余性,保障了信息的实时、全面传输,为机器人系统快速、准确地作出正确的判断和决策奠定了基础。目前,多传感器融合技术方法主要有加权平均法,卡尔曼滤波法,贝叶斯估计,D-S证据理论推理等[9]。本文采用一种将D-S理论和人工神经网路相结合的信息融合结构[10]。 D-S证据理论无需先验概率,能够满足比贝叶斯概率论更弱的条件;具有直接表达“不确定”和“不知道”的能力,但其缺乏鲁棒性,证据对命题具有绝对否决权,对基本信度分配很敏感。在非线性化系统中,利用BP神经网路多层前馈网络的反相传播学习方式,很好地实现了模式识别[11]。软件算法的原理结构如图5所示。

图5 软件算法的原理结构图
4 结束语
随着网络技术和人工智能技术的发展,智能机器人已经广泛地应用在各个领域。实现自主机器人的实用化、系统化、智能化是机器人研究中富有挑战性的课题。
本文主要设计了一种基于视觉跟踪和嵌入式系统的自主机器人,该机器人具有低功耗、低成本、独立性强、方便维护、灵活易控的优点,可以实现导航定位、自主避障、无线通信等功能,具有广阔的应用前景。
[1] 张军.智能机器人嵌入式系统应用研究[D].太原:中北大学,2005:21-22.
[2] 蔡自兴.智能控制及移动机器人研究进展[J].中南大学学报,2005,36(5):724.
[3] 崔月盟.基于强化学习和视觉导航的移动机器人控制[D].天津:河北工业大学,2005:25-36.
[4] 陈白帆,蔡自兴.基于尺度空间理论的Harris角点检测[J].中南大学学报(自然科学版),2005(5):37-40.
[5] 李昕颖.基于DSP MC56F8037超声波测距仪的研究[D].扬州:扬州大学,2014.
[6] 赵小强,赵连玉.超声波测距系统中的温度补偿[J].组合机床与自动化加工技术,2008(12):62-64.
[7] 郭栋,秦明芝,王伟敏. 基于CC2430的ZigBee无线传感器网络设计与实现[J]. 物联网技术,2011(1):41-43.
[8] 陈奕君.基于多传感器信息融合的机器人避障研究[D].大庆:东北石油大学,2014.
[9] 杜加萍.多传感器信息融合算法的研究及应用[D].无锡:江南大学,2011.
[10]费云瑞.多传感器信息融合在嵌入式系统构建的移动机器人上的实现[D].青岛:中国海洋大学,2006:38-40.
[11]王飞,李定主.模式识别中贝叶斯决策理论的研究[J]. 科技情报开发与经济,2007(7):165-166.
Design of the Machine Vision Positioning System for Indoor Mobile Robot
LUAN Luxiang
(Liaoning Provincial College of Communications,Shenyang 110122,China)
By adopting the embedded real-time operating system with DSP+ARM micro controllers as the core,the indoor mobile robot based on embedded system and machine vision positioning is designed.By using visual navigation image processing technology,the morphological method,and the Harris corner detection method based on scale space theory,and with aid of inertial navigation technology of gyroscope and accelerometer,the map matching positioning can be conducted,and the map can be updated in accordance with the variation of environment for implementing navigation.Based on ultrasonic sensors,the obstacle avoidance module is designed to realize automatic obstacle avoidance.The wireless communication module is designed based on ZigBee technology,to achieve intelligent control for robot,and implement information exchange between robots and between robot and server.By using multi-sensor fusion technology,the D-S theory and artificial neural network is combined.In nonlinear system,with help of inverse propagation learning mode of BP neural network multi-layer feedforward network,pattern recognition can be implemented well.Comparing with other robot systems,this system possesses powerful independent operability,functional diversification,and strong extensibility,and it overcomes the disadvantages of current robots,such as high cost,large power consumption,poor real time performance and inaccurate positioning.
Robot; Intelligent control; Embedded system; Neural network; Sensor; Vision positioning; Navigation; Wireless communication
栾禄祥(1983—),男,硕士,讲师,主要从事自动化控制、计算机网络、控制理论与控制工程和大数据采集与大数据应用技术的研究和应用。E-mail:phacker@163.com。
TH6;TP23
A
10.16086/j.cnki.issn 1000-0380.201702013
修改稿收到日期:2016-03-05
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
纺织科学研究(2021年1期)2021-12-03
现代仪器与医疗(2021年1期)2021-06-09
电子制作(2019年22期)2020-01-14
中国惯性技术学报(2019年3期)2019-10-15
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
制造技术与机床(2017年3期)2017-06-23
