
可穿戴上肢外骨骼机器人的算法和仿真
2017-03-02 05:40:08张恕远吕光远
自动化仪表 2017年2期
吴 攀,张恕远,谭 越,李 潇,刘 川,邓 勇,吕光远
(1.西华大学机械工程学院,四川 成都 610039;2.95685部队,云南 昆明 650000;3.成都航天通信设备有限责任公司,四川 成都 610051)
可穿戴上肢外骨骼机器人的算法和仿真
吴 攀1,张恕远1,谭 越1,李 潇2,刘 川3,邓 勇1,吕光远1
(1.西华大学机械工程学院,四川 成都 610039;2.95685部队,云南 昆明 650000;3.成都航天通信设备有限责任公司,四川 成都 610051)
针对可穿戴上肢外骨骼机器人的传统PID控制算法稳定时间长、偏差较大等特点,分析了可穿戴上肢外骨骼工作原理和结构,建立了人体上肢外骨骼的控制模型,提出了具有自适应性、精确性、快速响应性等特点的自抗扰控制算法,从而达到外骨骼快速跟随手臂和手臂平稳控制外骨骼的目的。通过对PID算法、非线性跟踪微分器(TD)、非线性扩张状态观测器(ESO)、自抗扰控制算法的理论分析和Matlab仿真,得到了更直观的运动学数据:关节的最大偏差和达到稳定的时间。比较分析这几种算法的数据可知,自抗扰控制具有响应迅速、动态补偿、超调量小的优点。制作了试样关节、控制电路、驱动电路,并编写了对应的调试程序。试验结果表明,自抗扰控制算法可以更好地控制上肢外骨骼机器人,具有良好的实际控制效果。
机器人; 可穿戴上肢外骨骼; 智能控制; 控制算法; 自抗扰; PID算法
0 引言
上肢关节的控制算法作为整个外骨骼机器人系统的“灵魂”,关系到系统的稳定性和安全性。可穿戴上肢外骨骼作为辅助人体的机械设备,可跟随手臂运动,辅助搬运物体。在此过程中,搬运的物体质量存在不确定性,系统的摩擦力随外界温度、系统的使用时间变化也存在不确定性[1]。
针对上述系统的时变特点,需要控制算法具有自适应性、精确性、快速响应性,使外骨骼快速跟随手臂。由于传统的PID算法输入信号为差值,输出的快速性和超调性存在矛盾,所以PID算法存在一定的缺陷。由于手臂存在柔性,从控制整体的精度来看,控制精确性要求不高。但是控制过程中的超调量(过冲),特别是在卸载过程中,会对手臂造成伤害。因此,选择自抗扰控制算法来实现对关节的快速、精确、平稳控制。
1 PID控制算法的理论基础和仿真实现
PID控制算法是较常用的算法。本文通过PID控制算法对外骨骼进行控制,再观察控制结果,从而对机械骨骼特性有更直观的认识[1-2]。
PID控制率为:
(1)
整理得到:
(2)
式中:u(t)为输出,在这里为转矩;e(t)为控制器输入的偏差信号;kp、ki、kd分别为比例、积分和微分所占比例系数,这三个系数的选取关系到算法的响应速度、超调量和静差。
建立控制模型,关于转矩的方程为:
(3)

为了简化过程,先忽略摩擦力和外部扰动,数学模型中的参数和动力学仿真中相同。
初始条件kp、ki、kd分别为150、120、20,关节3的角度不变,关节4的阶跃为90°。观察阶跃响应下的输出比较如图1所示。
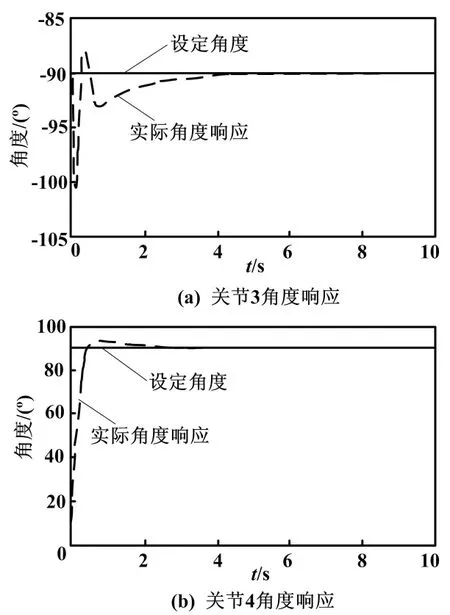
图1 采用PID控制算法的关节角度响应曲线图
从图1可以看出,加入积分分量可消除静差,但是积分分量在消除静差的同时也带来了超调,且误差越大积分越快。如果在平衡位置积分量过大会造成超调,超调的误差为负误差,积分量减小,从而渐渐达到平衡。
关节3的角度响应如图1(a)所示,出现误差后积分分量作用于积分,出现超调后积分分量减小,角度也减小,积分逐步稳定。此过程太慢且不稳定,6 s后完全消除了静差。关节4的角度响应如图1(b)所示,在3 s后完全消除了静差,从而达到稳定。
2 自抗扰算法的理论和仿真
自抗扰控制器[4]由非线性跟踪微分器(tracking differentiator,TD)[5]、非线性扩张状态观测器(extended state observer,ESO)[6]和非线性PID组合[7]而成。
非线性跟踪微分器对输入信号进行跟踪和微分,同时具有滤波的作用,可用于对系统控制的输入信号进行过渡和滤波,并得到输入信号的微分。
非线性扩张观测器完成对系统未知干扰和不确定部分的估计。
非线性PID组合是在非线性范围内寻找更优的组合形式。其中,非线性跟踪微分器和观测补偿是控制器的必备和主要功能,非线性PID组合形式可结合自身功能需要确定[8]。
2.1 非线性TD的理论基础和仿真实现
韩京清教授设计的跟踪微分器可对阶跃信号完成过渡处理,并对输入信号进行滤波,最终得到其微分。
x1(k+1)=x1(k)+hx2(k)
(4)
x2(k+1)=x2(k)+h×fst{[x1(k)-v(k)],x2,δ}
(5)
式中:x1为跟踪信号;h为采样周期;x2为跟踪的微分信号;fst{[x1(k)-v(k)],x2,δ}为最速控制的综合函数;v为输入信号;δ为跟踪输入函数快慢的参数,数值越大表示跟踪越快。
利用Matlab对加入干扰的阶跃信号进行跟踪。确定采样周期h=0.01,δ=250,干扰信号为随机信号,幅度为0.5,阶跃信号幅值为10。跟踪信号仿真结果如图2所示。
由图2(a)可知,输出信号能够平稳地跟踪阶跃信号完成过渡过程,并滤除干扰信号以还原原始信号。由图2(b)可知,与跟踪信号对比,微分有明显的加速和减速过程,完成微分量稳定到0的过渡,且基本不受干扰影响。
2.2 ESO的理论基础与仿真实现
在外骨骼的控制系统运行过程中,变量无法在线测试并存在未知的外部扰动,对控制有很大的干扰和影响。如果能将这些变化量统一地表示出来,补偿到控制输出中以消除外部不确定因素的影响,则可以提高系统的控制精度和适应性。观测器的作用是估计系统中不能直接测量的状态变量。
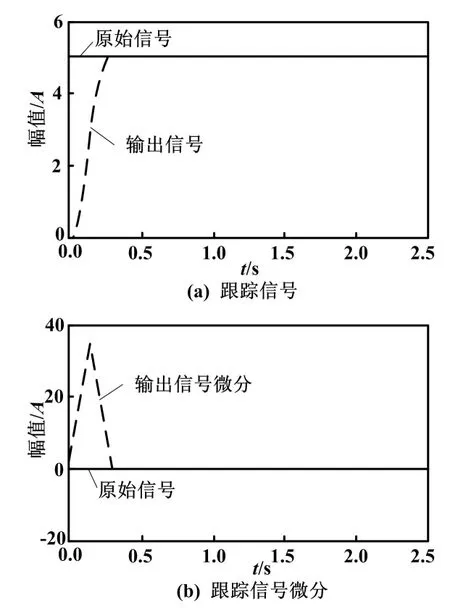
图2 跟踪信号仿真结果
根据韩京清教授所设计的扩张状态观测器,动力关节是一个独立的控制单元,所以输入和输出都应该为该关节自身可以检测的量,关节间的力扰动、外部干扰等均采用观测器作为外部扰动进行观测。动力关节模型表示为:
x1=x2
(6)
x3=x4
(7)
x2=f1(x,u2)+b1u1
(8)
x4=f2(x,u1)+b2u2
(9)
y1=x1
(10)
y2=x2
(11)
式中:[x1x2x3x4]=[θ3θ3θ4θ4];f1(x1,u2)、f2(x,u1)分别为关于[x1x2x3x4]和关节输入转矩[u1u2]的复杂函数,很难直接确定函数参数。因此,把不确定的外部扰动和内部扰动作为未知参数。ESO可表示为:
e=z1-y
(12)
z1=z2-β1e
(13)
z2=z3-β2fal(e,α1,δ)+bu
(14)
z3=-β3fal(e,α2,δ)
(15)
式中:fal(e,α,δ)为饱和函数。将β1=100、β2=250、β3=800、δ=0.01代入ESO函数中,其他的模型参数原理也是一样。利用Matlab进行仿真,将动力学模型用S函数Model表示[9],同时也将观测器需要观测的部分输出,以便查看观测器是否正确运行。
将观测器的输出代入PID控制中进行补偿,只要将PID控制器中的kp、ki、kd分别设为150、0、20,即可得关节角度响应曲线如图3所示。

图3 采用ESO的关节角度响应曲线图
图3(a)为关节3的角度响应曲线图。关节3受到关节4的作用力向负方向运动,最大角度为-100°,最大偏差为10°,小于单纯PID控制的关节3偏差,在0.6 s后达到稳定且无明显超调。图3(b)为关节4的角度响应曲线图。关节4设定的目标角度为90°,在0.5 s内快速、平稳到达设定角度,并且无超调。
2.3 自抗扰控制算法的仿真实现
将非线性PID、扩张观测器和非线性跟踪微分器三者有机地组合在一起,形成自抗干扰控制器。自抗干扰器电路[10]如图4所示。

图4 自抗干扰器电路图
图4中:V(t)为输入信号;Y(t)为输出信号;v1能够快速无超调跟踪上输入信号;b0为比例增益;v2为v1的一个微分信号;z1为y的观测量;z2为控制器的y的微分的观测量。
利用Matlab进行仿真[11],仿真条件和上文一致,得到结果如图5所示。关节3受到关节4的作用力,向负方向运动最大达到-95°,最大偏差为5°,比单纯使用观测器的偏差要小,在0.7 s后达到稳定且无明显超调。关节4设定的目标角度为90°,在0.6 s内快速平稳到达设定角度且无超调。

图5 采用自抗扰控制算法的关节角度响应曲线图
外骨骼关节在PID算法和自抗扰算法中的数据对比如表1所示。
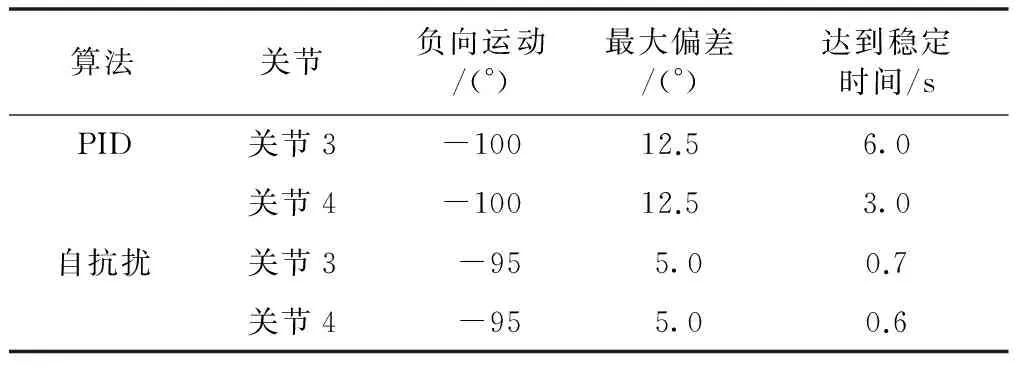
表1 PID算法和自抗扰算法的数据对比
相对于PID算法,自抗扰控制具有响应迅速,超调量小的优点[12]。其观测器可以实现对外部干扰和不确定参数的估计,以及控制系统的动态补偿。对外骨骼动力关节的控制具有重要的意义。
3 可穿戴上肢外骨骼试验
为了对可穿戴上肢外骨骼动力关节进行进一步的分析,设计并建立试验平台,制作动力关节试验样品,验证了动力关节控制算法及特性。
首先对系统控制电路板进行焊接调试,测试电路的基本功能。检测PWM输出、MOS管驱动器是否工作,并完成电流采集放大电路的放大倍数调节等。然后,制作动力关节加工试验样品。无刷电机通过关节的齿轮减速器输出动力,编码器通过白色的塑料安装架安装在电机上面。通过安装在主轴上的磁编码器检测关节角度,将总质量为7 kg的铝排作为关节的负载进行驱动,达到了理想的驱动效果。
4 结束语
针对传统PID控制器对外骨骼动力关节控制存在的对部干扰敏感、超调过大和响应过慢等问题,利用自抗扰控制算法设计了自抗扰控制器,实现了对外骨骼动力关节的控制。在对可穿戴上肢外骨骼结构设计及控制算法进行研究的基础上,建立试验平台,制作动力关节样品,验证动力关节控制算法及特性。试验结果表明,动力关节驱动能力强,完全满足要求;控制算法对输入信号响应迅速且无明显超调。
[1] ASTROM K J,HAGGLUND T.PID controllers:theory,design and tuning[M].Instrument Society of America,1995.
[2] RAD A B,LO W L.Predictive PI controller[J].INT J Control,1994,60(5):953-975.
[3] 刘金琨.先进PID控制及其Matlab仿真[M].3版.北京:电子工业出版社,2002.
[4] 韩京清,王伟.跟踪微分器[J].系统科学与数学,1994,14(2):177-183.
[5] 韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002,9(3):13-18.
[6] 韩京清.一类不确定对象的扩张状态观测器[J].控制与决策,1995,10(1):85-88.
[7] 韩京清.非线性PID控制器[J].自动化学报,1994,20(4):487-490.
[8] 韩京清.非线性状态误差反馈控制律—NlsEF[J].控制与决策,1995,10(3):221-225.
[9] 冯惕,王俭.基于S-函数计算机控制算法的Simulink仿真[J].福建电脑,2006(12):117-118.
[10]韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-23.
[11]薛定宇,陈阳泉.基于Matlab/simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.
[12]韩京清.自抗扰控制技术[J].前沿科学,2007(1):25-32.
Algorithm and Simulation of Wearable Upper Limb Exoskeleton Robot
WU Pan1,ZHANG Shuyuan1,TAN Yue1,LI Xiao2,LIU Chuan3,DENG Yong1,LGuangyuan1
(1.School of Mechanical Engineering,Xihua University ,Chengdu 610039,China;2.95685 Troops,Kunming 650000,China; 3.Chengdu Space Communication Equipment Co.,Ltd.,Chengdu 610051,China)
According to the characteristics of the traditional control algorithm of wearable upper limb exoskeleton robot,i.e.,long stable time and large deviation,the operational principle and structure of the wearable upper limb exoskeleton are analyzed,and the control model of human upper limb exoskeleton is set up,the auto-disturbance-rejection control algorithm featuring adaptive,accurate,and fast response is put forward,which achieves the purpose that exoskeleton fast follows up the arm,and the arm smoothly controls exoskeleton.Though the theoretical analysis and MATLAB simulation of PID algorithm,nonlinear tracking differentiator,nonlinear extended state observer,and auto-disturbance-rejection control algorithm, more intuitive kinematic data are obtained:maximum deviation of the joints,the period for reaching stable state.Comparative analysis of the data of these several kinds of algorithms shows that the immunity control has the advantages of quick response,dynamic compensation and less overshoot.The sample joint,control circuit and drive circuit are fabricated,and corresponding debugging program is written,to verify that the auto-disturbance rejection control algorithm can better control the upper limb exoskeleton robot with practical control effects.
Robot; Wearable upper limb exoskeleton; Intelligent control; Control algorithm; Auto-disturbance-rejection; PID algorithm
四川省教育厅基金资助项目(JYBFX-YQ-1)
吴攀(1990—),男,在读硕士研究生,主要从事机电一体化方向的研究。E-mail:960496380@qq.com。
TH132;TP273
A
10.16086/j.cnki.issn 1000-0380.201702011
修改稿收到日期:2016-10-21
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
数学物理学报(2021年2期)2021-06-09 08:54:26
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
数学物理学报(2019年5期)2019-11-29 07:46:34
广东技术师范大学学报(2016年5期)2016-08-22 09:07:22
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19 06:55:30
电测与仪表(2015年19期)2015-04-09 11:32:56
