
离散异构多自主体系统的分布式编队控制
2017-03-02 05:40:03韩娜妮
自动化仪表 2017年2期
林 涛, 韩娜妮
(陇东学院电气工程学院,甘肃 庆阳 745000)
离散异构多自主体系统的分布式编队控制
林 涛, 韩娜妮
(陇东学院电气工程学院,甘肃 庆阳 745000)
针对固定多自主体网络拓扑,研究了离散异构多自主体系统的分布式编队跟踪问题。假设异构多自主体系统由一个领航者、一阶和二阶跟随者自主体构成。首先,不考虑固定时延,针对一阶和二阶跟随者自主体分别设计了分布式编队控制协议,通过利用代数图论及李雅普诺夫稳定理论,得到了所设计的协议有效的充分条件,并以LMI-线性矩阵不等式的形式给出。然后,考虑固定时延,对跟随者自主体设计了相应的编队控制协议,通过构造相应的李雅普诺夫函数,给出了该协议在存在时延时有效的充分条件。理论分析表明,在所设计协议的作用下,跟随者自主体能形成并保持所要求的编队,并且实现了和领航者速度一致。最后,仿真结果亦证明了4个跟随者自主体最终形成了所要求的矩形编队,并且速度与理论分析结果一致,表明了所设计协议的有效性。
异构多自主体系统; 离散系统; 分布式; 编队控制; 网络拓扑; 时延;仿真
0 引言
多自主体系统分布式编队控制,即通过设计编队控制协议,使多个自主体在行进中形成并保持一定的编队,以更高效地执行任务。该技术因其在军事、救灾等方面的广泛应用,受到了大量学者的关注。
同构多自主体系统中,所有的自主体均具有相同的数学模型,包括一阶、二阶、高阶和非线性模型。Rodrigues等[1]利用图论,研究了一阶动态多自主体系统的分布式编队控制。CHEN等[2]考虑了有限输入、干扰和时延等因素,分别研究了一阶和二阶多自主体系统的编队问题。利用多自主体系统一致性研究方法,CAO等[3]设计了包括编队项、避障项和速度一致项的编队协议。LIN等[4]和WANG等[5]分别研究了二阶多自主体系统的旋转编队问题和跟踪问题。WANG等[6]研究了移动机器人的圆形编队。MENG等[7]利用迭代学习控制方法,研究了高阶多自主体系统的编队控制问题。文献[8]和文献[9]是关于非线性多自主体系统的编队研究成果。徐敏敏等[10]针对多自主体系统一致性问题,提出了一种改进的、带有噪声的控制算法。
以上研究成果都是针对同构多自主体系统的,目前关于异构系统编队控制的成果仍较少[11-12]。本文针对离散异构多自主体系统,考虑有时延和无时延两种情况,设计了分布式编队控制协议,并且以LMI-线性矩阵不等式的形式给出了协议有效的充分条件。在所设计的协议作用下,自主体可以形成并保持所要求的编队,同时实现速度一致。
1 图论和系统描述

对于无向网络,若任意两个节点之间都存有一条路径,则此网络连通。
本文考虑由n个跟随者自主体,包括m个二阶自主体和(n-m)个一阶自主体,和领航者组成异构多自主体系统。其中,二阶自主体描述为:
(1)
式中:xi(k)、vi(k)分别为第i个自主体时刻的位置和
速度信息;ui(k)为控制输入;T为采样周期。
一阶自主体动态模型描述为:
xi(k+1)=xi(k)+Tui(k)
(2)
式中:xi(k)、ui(k)分别为第i个自主体的位置信息和控制输入;i=m+1,m+2,…,n。
领航者自主体描述为:
(3)
式中:x0(k)、v0(k)、u0(k)分别为领航者的位置、速度和控制输入。
2 多自主体系统编队控制
多自主体系统在实际环境中运行时,不可避免地受到通信延迟的影响,所以在研究多自主体系统协调编队时,时延问题尤为重要。针对无时延和固定时延两种情况,分别设计了分布式编队控制协议(A)和(B)。在所设计的协议的作用下,跟随者自主体以一定的编队跟随领航者的运行轨迹。
2.1 无时延编队控制协议设计
针对异构多自主体系统,不考虑时延,设计了编队控制协议(A)。
(4)
式中:k1、k2为待定常数。
若第i个自主体能接收到领航者的信息,则bi=1;否则,bi=0。δi为自主体i和领航者之间的相对距
离信息。

(5)

z(k+1)=Ez(k)
(6)

定理1:假设多自主体网络连通,针对误差系统(A),若存在正定对称矩阵P,满足式(7),则误差系统(A)渐进稳定,即由二阶自主体和一阶自主体及领航者组成的异构多自主体系统,在分布式编队控制协议(A)的作用下,能形成并保持所要求的编队,并且实现了速度一致。
(7)
证明:构造李雅普诺夫函数V(k)=zT(k)Pz(k)。
其沿式(6)的前向差分为:ΔV(k)=V(k+1)-
V(k)=zT(k+1)Pz(k+1)-zT(k)Pz(k)=zT(k)ETPEz(k)-zT(k)Pz(k)=zT(k)(ETPE-)z(k)。

2.2 固定时延多自主体系统编队控制
考虑固定时间延迟,设计了如下的分布式编队控制协议(B)。
(8)
式中:d为固定时延。

(9)

z(k+1)=E0z(k)+E1z(k-d)
(10)

定理2:假设多自主体网络连通,对于误差系统(C),若存在正定对称矩阵满足式(11),则误差系统(C)逐渐稳定,即由二阶自主体、一阶自主体和领航者组成的异构多自主体系统,在分布式编队控制协议的作用下,能实现所设计的编队,并且实现了速度一致。
(11)

其沿误差系统(C)的前向差分为:


3 仿真研究
由四个自主体组成的多自主体网络拓扑如图1所示。自主体1和2为二阶自主体,自主体3和4为一阶自主体,0为虚拟领航者。

图1 多自主体网络拓扑图
3.1 无时延仿真结果
此部分仿真假设δsx=[-2 2],δfx=[2 -2],δsy=[20 20],δfx=[-20 -20]。
误差系统(A)的误差系统的状态轨迹如图2所示。图中所有状态最终趋于原点,证明其渐进稳定。

图2 误差系统(A)状态轨迹图
异构多自主体系统在编队控制协议(A)作用下的状态轨迹曲线如图3所示。4个跟随者自主体形成了所要求的编队,并且最终跟踪领航者的轨迹,实现了速度一致。

图3 协议(A)作用下的系统状态轨迹图
协议(A)作用下的二阶自主体速度轨迹曲线如图4所示。2个自主体的速度最终趋向于领航者的速度轨迹,证明了所设计的协议有效。

图4 协议(A)作用下的二阶自主体速度轨迹图
3.2 固定时延仿真结果
本部分考虑固定时延,且d=2。相对距离信息δsx=[-2,2],δfx=[2,-2],δsy=[2,2],δfx=[-2,-2]。
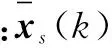
误差系统(C)的状态轨迹曲线如图5所示。6个状态最终趋向于原点,证明其渐进稳定。
图5 误差系统(C)状态轨迹图
异构多自主体系统在编队控制协议(B)作用下的状态轨迹如图6所示。

图6 协议(B)作用下的系统状态轨迹图
图6中,4个自主体最终形成了所设计的矩形,并且和领航者实现了速度一致。编队控制协议(B)作用下的二阶智能体速度轨迹如图7所示,进一步说明了在编队控制协议(B)的作用下,二阶自主体和领航者实现了速度一致。

图7 协议(B)作用下的二阶智能体速度轨迹图
4 结束语
本文研究了离散异构多自主体系统的编队控制问题。分别针对有时延和无时延两种情况,设计了相应的编队控制协议,通过利用代数图论和李雅普诺夫稳定理论,以LMI-线性矩阵不等式的形式给出了使协议有效的充分条件。理论分析和仿真结果证明,在所设计的协议的作用下,跟随者自主体能形成并保持所要求的编队,并且实现了速度一致。
[1] RODRIGUES J,FIFUEIRA D,NEVES C,et al.Leader-following graph-based distributed formation control[C]// Proceeding of Robotica,2008:71-76.
[2] CHEN F,CHEN Z Q,LIU Z X,et al.Decentralized formation control of mobile agents:a unified framework [J].Physica A,2008,387(19):4917-4926.
[3] CAO J F,LING Z H,YUAN Y F,et al.Distributed formation control for a multi-agent system with dynamic and static obstacle avoidances [J].Chinese Physics B,2014,23 (7):337-342.
[4] LIN P,JIA Y M.Distributed rotating formation control of multi-agent systems [J].Systems & Control Letters,2010,59(10):587-595.
[5] WANG Y W,LIU M,LIU Z W,et al.Formation tracking of the second-order multi-agent systems using position-only information via impulsive control with input delays [J].Applied Mathematics and Computation,2014,246(C):572-585.
[6] WANG C,XIE G M,CAO M.Forming circle formations of anonymous mobile agents with order preservation [J].IEEE Transactions on Automatic Control,2013,58(12):3248-3254.
[7] MENG D Y,JIA Y M.Formation control for multi-agent systems through an iterative learning design approach [J].Int.J.Robust Nonlinear Control,2012,24(2):340-361.
[8] LIU Y,JIA Y M.Formation control of discrete-time multi-agent systems by iterative learning approach [J].International Journal of Control,Automation,and Systems,2012,10(5):913-919.
[9] WANG J L,WU H N.Leader-following formation control of multi-agent systems under fixed and switching topologies [J].International Journal of Control,2012,85(6):695-705.
[10]徐敏敏,金晓宏,雷斌,等.复杂条件下多智能体系统编队一致性控制 [J].武汉科技大学学报,2015,38(5):373-377.
[11]REIHANE R,ABDOLLAHI F,NAQSHI K.Time-varying formation control of a collaborative heterogeneous multi-agent system [J].Robotics and autonomous systems,2014,62(12):1799-1805.
[12]WANG X L.Distributed formation output regulation of switching heterogeneous multi-agent systems [J].International Journal of Systems Science,2013,44(11):2004-2014.
[13]GODSIL C,ROYLE G.Algebraic Graph Theory [M].New York:Springer,2001.
Distributed Formation Control of Discrete Heterogeneous Multi-Agent Systems
LIN Tao,HAN Nani
(College of Electrical Engineering, Longdong University, Qingyang 745000,China)
In accordance with the fixed multi-agent network topology,the distributed formation tracking of discrete heterogeneous multi-agent system is investigated.Assuming the heterogeneous multi-agent system consists of a leader,first-order follower agents,and second-order follower agents;firstly,without considering the constant time delay,the distributed formation control protocols are respectively designed for the first-order and second-order follower agents,and by using algebraic graph theory and Lyapunov stability theory,the effective sufficient condition of the protocol designed is obtained and given in the form of LMI (linear matrix inequality).Then,considering the constant time delay,the relevant formation protocols are designed for the follower agents;through structuring corresponding Lyapunov function,the effective sufficient condition that satisfying protocols with constant time delay is given.The theoretical analysis indicates that under action of the proposed protocols,followers may form and keep the desired formation,and reach consistent speed of the leader.Finally,the simulation results prove that the four agents finally form the desired rectangle formation and reach consistent speed.
Heterogeneous multi-agent system; Discrete system; Distribution; Formation control; Network topology; Time delay;Simulation
林涛(1978—),男,硕士,讲师,主要从事多自主体系统的协调控制的研究。E-mail:lintao8888231@sohu.com。
TH6;TP273
A
10.16086/j.cnki.issn 1000-0380.201702009
修改稿收到日期:2016-08-10
猜你喜欢
智慧少年(2022年8期)2022-05-30 10:48:04
今日农业(2021年5期)2021-05-22 01:32:50
应用数学(2020年2期)2020-06-24 06:02:46
数学物理学报(2018年6期)2019-01-28 08:58:02
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
智能城市(2018年8期)2018-07-06 01:11:00
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:44
纺织科学研究(2017年8期)2017-09-05 09:46:54
通信技术(2016年12期)2016-12-28 10:35:10
科技与创新(2016年17期)2016-11-04 10:04:24
