
基于螺栓联接非线性系统的杆式超声电机建模与分析
2017-03-02 03:25陶征,胡斌,刘旭
郑州大学学报(工学版) 2017年1期
陶 征,胡 斌,刘 旭
(郑州大学 机械工程学院,河南 郑州 450001)
基于螺栓联接非线性系统的杆式超声电机建模与分析
陶 征,胡 斌,刘 旭
(郑州大学 机械工程学院,河南 郑州 450001)
针对当前杆式超声电机设计中通常采用连续复合材料结构形式的有限元模型而导致计算精度不足的问题,提出了在螺栓预紧力条件下的杆式多自由度超声电机振子的建模方法,并分析了螺栓预紧力和联接面摩擦系数对振子模态频率的影响.实验表明,考虑螺栓连接非线性因素的有限元分析方法对电机各阶工作模态频率的计算误差分别只有0.05%、0.47%、0.64%,有着很好的计算精度,该结果说明考虑螺栓联接非线性的有限元模型更有利于电机性能的设计和预估.
超声电机;电机振子;螺栓联接;非线性
0 引言
超声电机的结构动态特性设计是电机设计过程中的一个重要内容[1-3].而建立准确反映电机结构动态特性的动力学模型是必要的前提和保障,其中解析法和有限元法是两种最主要的方法,如文献[4-6].解析法对于复杂结构而言,往往需要进行结构的简化和条件假设处理.因此,很难满足求解的精度要求,具有一定的局限性.
鉴于此,有限单元法的结构动力学分析已成为现阶段超声电机结构设计中最主要的方法.然而,根据笔者的研究发现,长期以来,在诸如纵扭超声电机、单定子多自由度超声电机等杆式超声电机的结构设计过程中,电机振子的有限元模型大都采用连续复合材料结构形式,与实际多个结构由螺栓连接而成出入较大,使得分析计算结果与试验所得相差甚远.因此,建立准确的有限元模型非常必要.
笔者以杆式电机中单定子多自由度超声电机振子的设计研究为基础,探讨了在螺栓预紧力条件下电机振子的建模方法,并分析了螺栓预紧力和联接面摩擦系数对振子模态频率的影响,并通过实验分析验证了有限元模型的精度.
1 问题的提出
单定子多自由度超声电机由于能够提供两个或两个以上自由度的运动,而具有较高的机械集成度,这一特点使得该电机在构建结构简单、紧凑小巧的机械传动系统方面,尤其在微创手术以及航天工程的某些特殊结构等方面有着良好的应用前景,因而,具有重要研究意义.
1.1 电机工作原理
如图1所示,单定子多自由度超声电机的振子由上、中、下3个金属弹性体、一组纵振陶瓷片和两组弯振陶瓷片以及连接螺栓等部件构成.其中,纵振陶瓷片组PZTC用于激发振子的1阶纵振模态;弯振陶瓷片组PZTA及PZTB在空间上垂直布置,分别用来激发振子在空间上相互垂直的两个2阶弯振模态,如图2所示.
当PZTA、PZTB两组弯振陶瓷片同时施加相位相差90°的高频交流电时,电机振子在压电陶瓷的逆压电效应作用下产生两个时空相差90°的弯曲振动模态(a)、(b).则振子端部质点通过模态运动的合成,形成椭圆形轨迹的运动(简称椭圆运动).通过摩擦驱动转子实现绕Z轴旋转.同理,在PZTA、PZTC或PZTB、PZTC两组陶瓷片上同时施加相位相差90°的高频交流电时,振子将同时产生纵振(c)和弯振(a或b),此时,振子端部质点通过两种模态运动合成驱动转子绕X轴或Y轴旋转.
图1 电机振子结构示意图Fig.1 The structure diagram of the motor vibrator
图2 电机工作原理Fig.2 The operating principle diagram of the motor
1.2 基于连续体有限元模型的设计
由上述可知,振子驱动端面质点形成的椭圆运动是实现电机驱动的必备条件之一,即要求纵、弯两个振动模式能在同一激励信号作用下达到共振状态,然而根据振动理论,两种异形模态在同一等截面直杆中频率一般是不相等的.为了获得较高的工作效率,实现电能对机械能的最大转换,对单定子多自由度超声电机的振子结构进行合理的设计,确保纵、弯两个工作模态频率具有较高的一致性(频率差值<100 Hz),是电机振子设计中的关键问题.
现有资料显示[7-8],在定子体开设环形槽,是实现杆式超声电机振子频率一致性的有效方法.如前所述,当前在杆式超声电机的结构设计过程中,电机动态特性的结构动力学模型大都采用连续复合材料结构形式.因此,笔者在初始研究过程中,基于已有的建模方法,从提高电机输出性能的角度出发,利用ANSYS有限元分析软件对电机振子进行计算和分析.
材料属性如表1所示,电机定子金属材料和压电材料分别由SOLID45和SOLID5两种单元定义.模型共有9 348个单元,11 932个节点,边界条件为自由-自由.
表1 材料参数Tab.1 The material parameter
表1中,PZT8压电材料性质包括压电应力矩[e]、弹性系数矩阵[c]、介电系数矩阵[ε],分别为:

经反复试算,最后得到一种较满意的方案,该设计方案中,电机振子各金属弹性体部分结构尺寸参数如图3所示,(压电陶瓷尺寸规格事先已选定),各工作模态频率如表2所示(计算结果最大偏差仅有16 Hz).
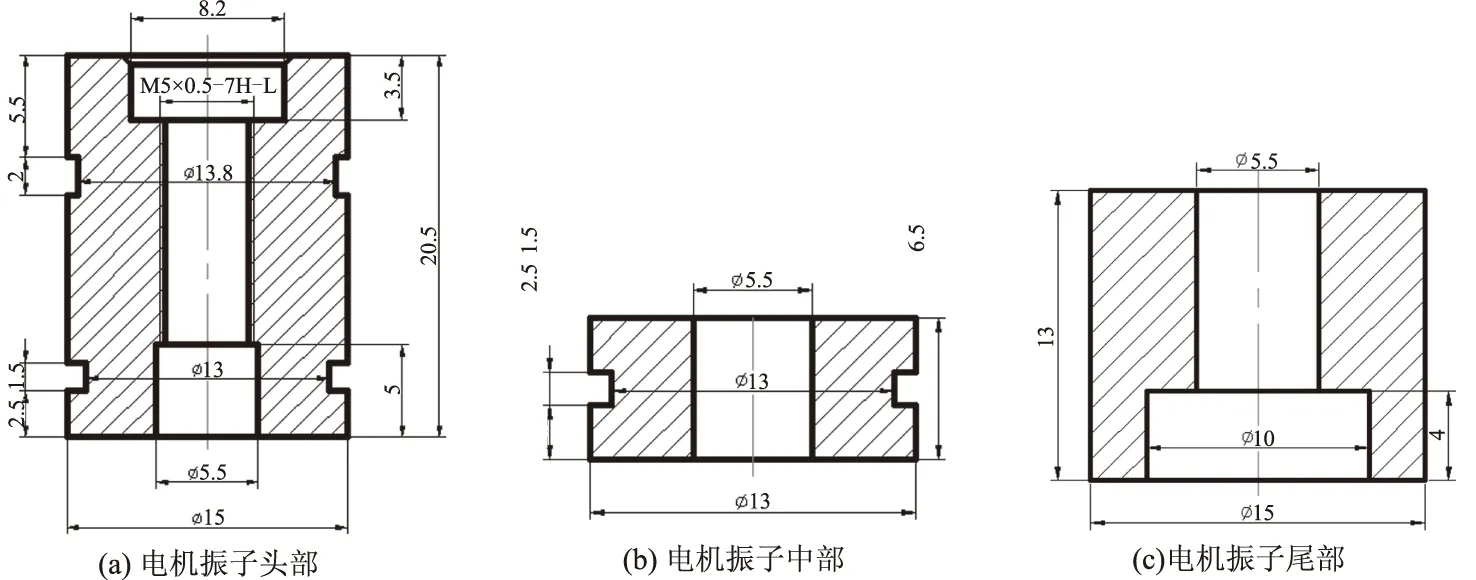
图3 电机振子结构参数Fig.3 The structural parameters of the motor vibrator

2阶弯振频率I2阶弯振频率II1阶纵振频率377913779337807
1.3 样机试验分析
基于图3结构参数加工、制造的电机样机振子如图4所示.

图4 样机振子Fig.4 The prototype motor vibrator
对样机振子采用PSV-300F-B型激光扫描多普勒测振仪器进行扫频测试,结果如图5所示,各阶模态频率如表3所示.
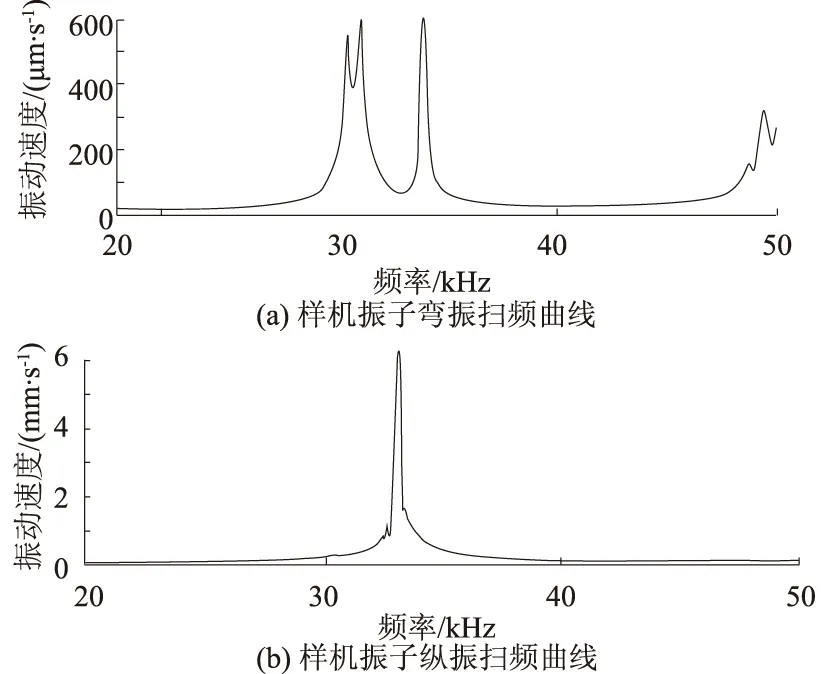
图5 扫频测试曲线Fig.5 The scanning frequency test curves

表3 样机振子的测试模态频率Tab.3 The test mode frequency of the prototype motor vibrator Hz
由表2、3可知,基于连续体有限元模型的模态频率计算结果与电机振子的试验测试结果相差甚远,两者之间的误差分别为:2阶弯振频率(I、II)24%、23%,1阶纵振频率13%.
上述结果说明基于连续体的有限元建模方法不能满足对该电机振子结构动态特性设计要求.因此,寻求准确的有限元建模方法是解决这一问题的前提.
2 基于螺栓联接的非线性系统的建模和分析
螺栓联接是机械结构中常见的联接方式,在螺栓连接结构中,螺栓预紧力的作用势必导致各组件间接触表面产生不同的接触应力和接触面粗糙度而形成分布不均的法向接触刚度和阻尼的非线性[9],这种接触界面的复杂行为将对结构整体的动态特性产生显著影响.
单定子多自由度超声电机的振子(如图1所示)正是由多个子结构通过螺栓连接而成,其联接界面的局部刚度和阻尼的非线性是影响结构整体动态特性主要因素.而基于连续体假设的有限元模型由于不能准确反映电机振子因接触面的存在所导致的复杂非线性现象,使得计算结果与实验值往往相差较大.因此,为了提高结构动力学模型的精度,应该考虑螺栓联接对结构动态特性的影响.
鉴于此,我们仍以图4所示样机为对象,利用ANSYS有限元分析软件,采用接触单元和非线性算法对振子的动态特性进行验证分析计算.
有限元模型如图6所示,模型采用六面体单元扫掠网格划分以避免畸形单元出现,并适当增加压电陶瓷单元划分密度以提高有限元模型分析精度.考虑到联接界面是影响结构整体动态特性的主要因素,在有限元建模过程中,忽略螺纹连接,将螺母与螺杆融为一体.其中,金属材料和压电材料依然分别采用SOLID45和SOLID5两种单元.根据振子结构特点,忽略电极片(电极片的厚度0.1mm),采用面-面接触单元TARGE170和CONTA174进行接触对定义,同一接触对的接触面和目标面有相同实常数号,接触法向为各自外法线方向,如图7所示,共9对.TARGE170模拟刚性目标面、CONTA174模拟柔性接触面.
图6 振子的有限元模型Fig.6 The finite element model of the vibrator
图7 接触对的定义Fig.7 The definition of contact pairs
螺栓预紧力的施加通过ANSYS提供的PTSMESH和预紧力单元PRETS179模拟.预紧力截面通过PTSMESH将已划分网格的螺杆模型联接件切成两部分,并插入预紧力单元定义.
预紧力的大小由工程实际中螺栓预紧力估算公式[10]:F=M/(Kgd)获得.其中,F为螺栓轴向预紧力;M为扭矩;K为扭矩系数(0.11~0.15);d为螺栓公称直径.
FKN法向接触刚度因子是影响精度和收敛行为的关键,一般来讲,FKN的取值越大则计算精度越高,然而,对于非线性计算来讲则收敛越困难,为兼顾二者的关系适当选取FKN的取值.ANSYS给出的FKN取值范围为0.01~10.
该模型共有18 009个单元,25 858个节点,边界条件为两端自由,螺栓预紧力由公式估算3 000 N,FKN值根据收敛情况最终设定为0.64,综合考虑各接触面间接触情况,摩擦系数定为0.4.
模态分析过程中,电机振子螺栓联接结构各处应力由结构静态非线性(接触状态为不分离(永远))求解获得,进而把应力以附加刚度的形式叠加到电机振子整体结构之上,最终得到基于螺栓联接非线性系统杆式电机振子各阶工作模态频率,如表4所示.

表4 接触模型各阶工作模态频率Tab.4 The working mode frequency of the contact model Hz
各阶工作模态频率(表4)表3可知,考虑螺栓预紧力的有限元模型的模态频率计算结果与电机振子的试验测试结果之间的误差分别为:2阶弯振频率(I、II)0.47%、0.64%,1阶纵振频率0.045%.说明在对杆式超声电机设计中,基于螺栓联接结构下的杆式电机建模方法更接近实际情况.接触模型的各阶振型图如图8所示.
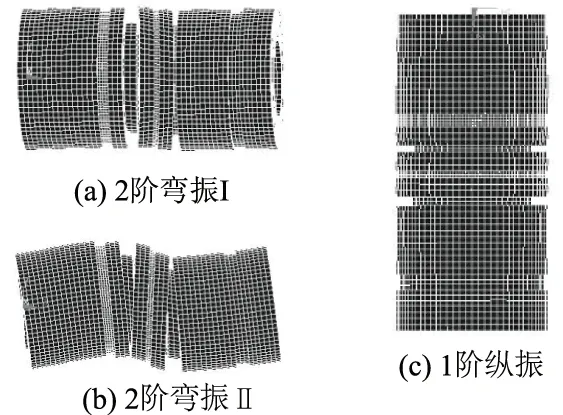
图8 有限元模型各阶振型图Fig.8 The vibration modes diagram of the contact model
3 不同预紧力和摩擦系数对模态频率的影响
电机振子动态特性与其结构刚度、螺栓预紧力以及联接面间的摩擦系数等有着密切关系.因此,研究不同预紧力以及摩擦系数对振子模态频率的影响是非常有必要的.
表5是基于图6所示有限元模型(法向刚度为0.64,摩擦系数0.5)在不同预紧力条件下该有限元模型的模态频率计算结果.
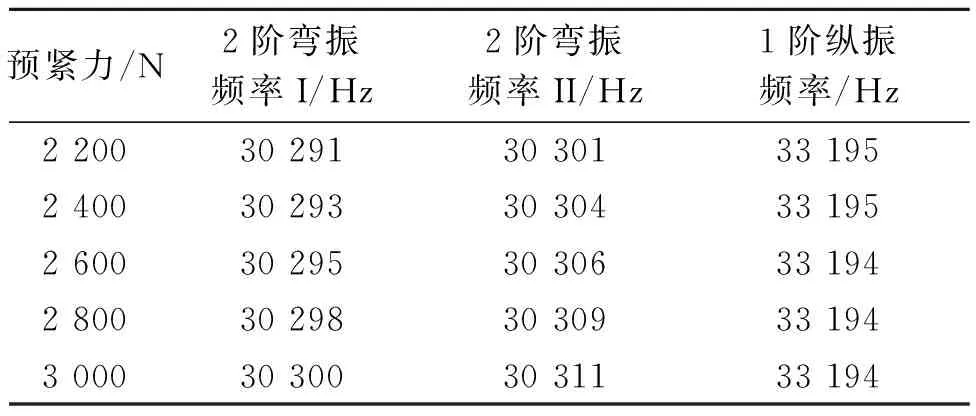
表5 不同螺栓预紧力下的各阶振动频率Tab.5 The vibration frequency under different bolt pretension
从表5可知,随着螺栓预紧力的增加,振子的模态频率也逐渐增加,但变化很小.分析原因,主要是非线性计算的收敛是一个非常麻烦的问题,涉及因素诸多.为了确保计算收敛,我们把预紧力设定在了电机振子合理装配所需预紧力的狭小范围之内,然而,尽管条件的设定尚欠完善,但对问题的研究还是具有一定的参考作用.
表6是在法向刚度为0.64,预紧力为3 000 N的条件下,有限元模型在不同摩擦系数下模态频率的计算结果.
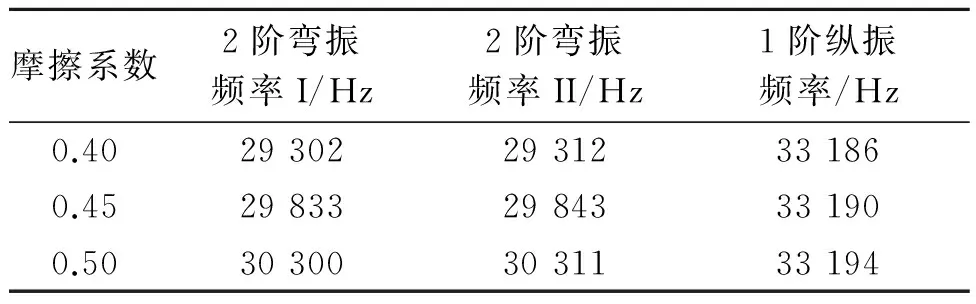
表6 不同摩擦系数下的各阶振动频率Tab.6 The vibration frequency under different friction coefficients
由表6可知,联接面间的摩擦系数对电机振子的动态性能有一定影响.电机振子模态频率随联接面的摩擦系数的增大而增大.
由此可见,对于有着螺栓连接结构的杆式超声电机的振子在进行动态特性的设计过程中,其联接界面预紧力及摩擦应予以考虑,以获得更接近实际情况的分析模型.
4 结论
当前,在对杆式超声电机振子进行动力学设计时,通常以连续复合材料结构的有限元模型进行简化.由于忽略了实际结构中螺栓连接所带来的非线性因素,这种情况直接导致在电机设计中较大的计算偏差从而无法很好地满足对电机的设计要求.针对这一问题,笔者提出了基于螺栓联接非线性系统的杆式超声电机的有限元精确建模分析方法,并在此基础上,分析得到了不同预紧力、摩擦系数对模态频率的影响规律.实验表明,考虑螺栓连接所带来的非线性因素的有限元分析方法与连续复合材料结构形式的有限元分析方法相比,设计频率与实测频率偏差降低了24%,说明考虑螺栓联接非线性系统影响的有限元模型更有利于电机性能的设计和预估,因此,该方法对杆式类超声电机的设计具有一定借鉴意义.
[1] 吴文才.多自由度超声电机设计与应用研究[D]. 南京:南京航空航天大学航空宇航学院, 2014.
[2] 陶征,刘本学.行波型超声电机与纵扭型超声电机的比较[J]. 郑州大学学报(工学版), 2009, 30(3): 60-64.
[3] 陈超,赵淳生.基于半解析法的旋转型行波超声电机定子的动态特性分析[J].中国机械工程,2005,16(21): 1940-1944.
[4] ZHOU G.The performance and design of ultrasonic vibration system for flexural mode [J].Ultrasonics, 2000,38: 979-984.
[5] BUDINGER M, ROUCHON J, NOGAREDE B.Analytical modeling for the design of a piezoelectric rotating mode motor [J].ASME transactions on mechatronics, 2004,9(1): 1-9.
[6] CAROTENUTO R, CALIANO G, IULA A.Langevin flexural piezoelectric motor based on stator precessional motion [J].Sens actuators, 2004,A113 :189-197.
[7] 陶征,赵淳生.基于ANSYS的纵扭超声电机定子的优化设计方法[J].压电与声光,2007,29(5): 603-608.[8] 陶征,赵淳生.电刷式纵扭型超声电机结构设计中的关键技术[J].振动与冲击,2005,24(6): 75-78.
[9] 赵丹,艾延廷,翟学,等.法向接触刚度对螺栓连接结构振动模态的影响研究[J].航空发动机,2012,38(3): 54-57.
[10]赵帅,王克明,慕鹏,等.螺栓联接结构振动特性有限元分析方法的研究[J].沈阳航空航天大学学报,2012, 29(2): 18-22.
Modeling and Analysis of the Rod-type Ultrasonic Motor Based on Bolted-joint Nonlinear System
TAO Zheng, HU Bin, LIU Xu
(School of Mechanical Engineering, Zhengzhou University, Zhengzhou 450001, China)
The computation accuracy was often insufficient in the rod-type ultrasonic motor design because of the adopted continuous composite structure finite element model. In this paper, a method for modeling the rod-type ultrasonic motor vibrator based on bolt pretension was presented and the influence of bolt pretension and contact surface friction coefficients on modal frequency was analyzed. Experiments showed that, the deviation of motor working mode frequency is 0.05%,0.47%,0.64% respectively through this finite element analysis method with consideration of bolted-joint nonlinear factors. Consequently, the calculation accuracy was good. It was shown that the finite element model based on bolted-joint nonlinear system was more conducive to motor performance design and estimation.
ultrasonic motor; vibrator; bolted-joint; nonlinearity
1671-6833(2017)01-0078-05
2016-08-25;
2016-10-18
机械结构力学及控制国家重点实验室开放课题项目(MCMS—0314G02);河南省基础与前沿技术研究项目(152300410040)
陶征(1970— ),男,河南汝南人,郑州大学讲师,博士,主要从事超声电机方面的研究,E-mail:taozheng@zzu.edu.cn.
TM356
A
10.13705/j.issn.1671-6833.2017.01.006
猜你喜欢
中国特种设备安全(2022年5期)2022-08-26
现代信息科技(2022年8期)2022-08-12
汽车实用技术(2022年13期)2022-07-19
中外公路(2022年1期)2022-05-14
中学生数理化·八年级物理人教版(2020年3期)2020-10-29
四川建筑(2020年1期)2020-07-21
物理学报(2019年12期)2019-06-29
浙江工业大学学报(2019年3期)2019-05-13
学校教育研究(2018年4期)2018-10-21
消费者报道(2016年5期)2016-11-18
