
EPS助力补偿控制策略的研究
2017-02-28 10:52祖春胜赵林峰
合肥工业大学学报(自然科学版) 2017年1期
姜 平, 祖春胜, 赵林峰
(合肥工业大学 机械工程学院,安徽 合肥 230009)
EPS助力补偿控制策略的研究
姜 平, 祖春胜, 赵林峰
(合肥工业大学 机械工程学院,安徽 合肥 230009)
文章分析了电动助力转向(electric power steering,EPS)系统各部分的动力学模型,并由此搭建了其Simulink仿真模型;对于时变性、非线性较强的EPS系统,采用了单神经元自适应PID(single neuron self-adaptive PID,SNPID)控制算法;针对一般助力特性曲线下EPS系统动态响应特性较差的问题,提出了在转矩传感器检测的转矩之中加入相位超前补偿、应对路面冲击的转矩微分补偿、减轻转向系统摩擦对系统影响的摩擦补偿、改善快速转向或换向时电机助力的迟钝和驾驶员“顿挫”感的惯性及阻尼补偿;并在上述补偿的基础上,针对原地撒手抖动问题提出了基于转矩变化率的助力死区增大控制方案。仿真和实车试验结果表明,加入补偿控制的EPS助力策略的动态响应特性和转向轻便性均得到了改善。
电动助力转向(EPS);单神经元自适应PID控制;助力补偿;转向轻便性;路感
电动助力转向(electric power steering,EPS)是世界汽车技术发展的研究热点和前沿技术之一[1],它能够保证汽车的安全性和稳定性,因此受到越来越多汽车厂商的青睐。
EPS系统内部存在时变性等不确定因素,而PID控制存在参数固定不变、不能在线自调整等问题,因此,文献[2]采用一种模糊控制算法,文献[3]采用H2和H∞的混合控制算法,以便改善该问题。此外,乘用车安装EPS系统后,电动机和减速机构会带来额外的惯性、阻尼以及摩擦,系统的动态转向特性和低速回正能力都会变差。针对该问题,文献[4-5]提出了在EPS助力策略中添加转矩微分、转矩相位超前以及摩擦、惯性和阻尼补偿等方法;文献[6-7]对主动转向时方向盘力矩的突变进行了研究。
本文采用单神经元自适应PID控制算法(single neuron self-adaptive PID,SNPID),同时对转矩信号进行超前调节、转矩微分以及摩擦、惯性和阻尼补偿;针对原地情况下撒手抖动问题提出基于转矩变化率的助力死区增大控制方案;并通过Simulink仿真和实车试验进行验证,以改善转向轻便性;同时进一步优化快速转向和原地撒手的动态特性,进而改善路感。
1 EPS系统动力学分析及建模
根据文献[3]和牛顿定律,建立EPS各部分的动力学方程。
(1) 齿轮齿条动力学模型。
(1)
其中,mr为齿条和车轮等效质量;Br为齿条阻尼系数;Ff为齿条库伦摩擦力;Kr为弹簧刚度;Ks为转矩传感器扭杆刚度;p为齿条位移;rp为小齿轮半径;θs为转向盘转角;Km为电动机轴扭杆刚度;im为电动机减速机构减速比;θm为电动机转角。
(2) 永磁有刷直流电机的数学模型。
Tm=KtIa
(2)
其中,Ua为电机控制电压;Ia为电机电枢电流;L为电机电感;R为电机电枢电阻;Ke为电机反电势系数;Tm为电机电磁转矩;Jm为电机轴转动惯量;Bm为电机轴阻尼系数;Kt为电机转矩系数。
(3) 输入轴模型。
(3)
其中,Td为转向盘输入转矩;Js为转向盘、转向轴等效转动惯量;Bs为转向轴阻尼系数;Ts为转矩传感器检测转矩。
(4) 转矩传感器模型。
(4)
2 控制算法
单神经元自适应控制器是通过对加权系数的调整来实现自适应、自组织功能,权系数的调整是按照有监督的Hebb学习规则实现的[8]。控制算法及学习算法如下:
(6)
其中

ηP、ηI、ηD分别为比例、积分、微分的学习速率;K为神经元的比例系数,K>0。
搭建基于Matlab/Simulink的EPS系统仿真模型。给予目标电流阶跃信号,所获得的仿真对比如图1所示。由图1可知,SNPID控制时,实际电流的超调量明显降低,电流波动明显得到改善,稳态误差进一步减小。

图1 PID及SNPID控制仿真对比
3 助力补偿控制策略
实际EPS系统中,转矩传感器安全位置的限制、系统的惯性与黏性导致电机实际输出的助力转矩和给定值之间有差距,影响驾驶员的驾驶舒适性[9]。本文采用相应的补偿控制策略,以改善EPS系统的动态转向特性和转向轻便性。
3.1 转矩相位补偿
传感器噪声和路面干扰导致转矩传感器对方向盘转矩的感知产生一定的滞后。为了提高EPS控制系统的快速响应特性,对转矩传感器检测到的转矩信号进行相位补偿,设计转矩超前校正器,以消除幅频特性曲线中尖峰的存在,并增大幅值裕量与相位裕量,以改善系统的稳定性及鲁棒性能。采用的超前校正器的传递函数为:
(7)
相位补偿前、后Gc(s)=Ts(s)/Td(s)的Bode图对比如图2所示。

图2 相位补偿前、后Bode图对比
由图2可知,进行相位补偿后,转矩传感器检测到的转矩信号和驾驶员实际输入的转矩信号在驾驶员低频输入区基本同相位;消除了幅频曲线中的尖峰位置,改善了系统的稳定性;幅值裕量和相位裕量的增大提高了系统的鲁棒性能。
相位补偿前、后转矩传感器测量值对比如图3所示。

图3 相位补偿前、后转矩传感器测量值对比
由图3可知,相位补偿后的转矩检测比补偿前的跟踪效果好。
3.2 转矩微分补偿
当EPS系统受到路面冲击力作用时,即可等效为小齿轮处受到冲击转矩TK,其运动方程为:
(8)
其中,JT为系统总的转动惯量;Bp为小齿轮处阻尼系数;θp为小齿轮转角;TM为电机折算到小齿轮处的助力矩,TM=imIaKt。
此时握住方向盘,必须提供的方向盘转矩为Td=Ksθp,助力特性曲线是转矩与目标助力电流之间的对应关系,这种对应关系无论是线性型还是曲线型,都可以归纳为转矩乘以助力增益KI得到目标助力电流。因此(8)式又可以表示为:
(9)
(9)式为在冲击转矩TK作用下的二阶系统,其固有频率ω0和阻尼比ζ0可以表示为:
(10)
其中,K=Ksθp(1+imKtKI)。
由(10)式可知,当KI增大时,ω0增大,ζ0减小,此时系统受到冲击转矩时,方向盘手感变差,抖动增加;反之,减小KI将会缓解冲击转矩带来的手感问题,但是导致转向轻便性变差。因此为了解决转向轻便性与方向盘手感之间的矛盾,本文在转矩传感器检测转矩中添加转矩微分补偿,其表达式为:
(11)
其中,Ktd为转矩微分补偿系数。则(9)式可以表示为:
(1+KtimKI)Ksθp=TK
(12)
加入转矩微分控制后,系统的固有频率ω0没有改变,但是相对阻尼系数ζ0增大了,因此增大助力增益KI后可以改善转向轻便性,同时适当增大微分补偿系数Ktd可以改善方向盘受冲击时的手感。
转矩微分补偿系数的确定是通过基本粒子群优化算法获取的,根据添加转矩微分补偿的目的选取冲击转矩作用下Ts与Td之间的方差作为适应度函数,其表达式为:
lg(Fitness)=lg[(Td-Ts)2/n1]
(13)
其中,n1为转矩信号采样点次数。
转矩微分补偿系数寻优曲线如图4所示,寻优结果见表1所列。

图4 转矩微分补偿系数寻优曲线

速度/(km·h-1)方差(适应度)微分补偿系数03.09510.1000203.08330.0685403.04950.0198603.03330.0150
根据表1中的数据拟合出微分补偿系数与车速之间的关系,进而搭建微分补偿的仿真模型。方向盘阶跃转矩作用下传感器检测转矩的对比如图5所示。

图5 冲击转矩下传感器检测转矩的对比
由图5可知,当方向盘受到冲击转矩的作用时,微分补偿前转矩传感器的输出呈现高频波动,表明电机内部也有高频波动,该波动对系统的稳定性和电机寿命都有影响;微分补偿后,抑制了转矩传感器的波动,有效地消除了转矩传感器所引起的噪声,减小了助力电动机的电流波动和方向盘抖动。
3.3 摩擦补偿
文献[10]指出车辆在原地或者行驶过程中转向阻力矩的构成部分,而助力摩擦补偿通常只考虑转向系统干摩擦。根据定义,转向系统干摩擦计算公式为:
(14)
其中,ΔTi为1个转向循环中方向盘转角2次通过0点时,方向盘转矩之差的绝对值;n2为转向循环的次数。
摩擦补偿的目的是为了改善低速范围内的转向轻便性,文献[4]指出日本的研究将低速区定义为0~30 km/h。因此本文通过实车试验获取3组低速区域的转矩转角关系,其中1组数据如图6所示。据此计算转向系统的干摩擦,可得原地干摩擦为4.76 N·m;10 km/h速度下干摩擦为3.15 N·m;30 km/h速度下干摩擦为1.87 N·m,从而拟合出转向系统干摩擦与车速之间的对应关系。
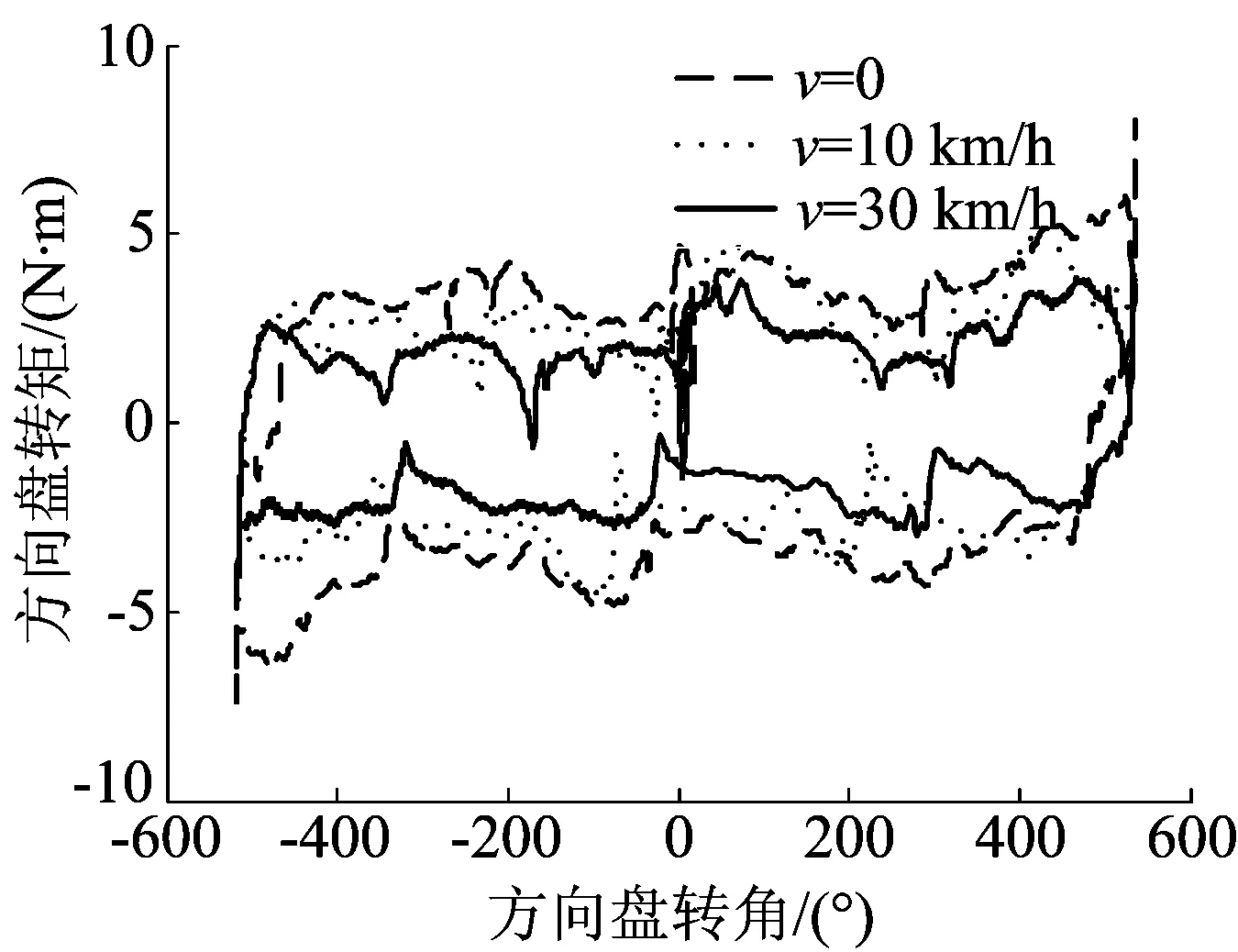
图6 转向系统干摩擦试验
根据半经验法和库伦摩擦形式确定非线性摩擦补偿控制策略,其表达式为:
1860例患者,其中男1065例,女795例,年龄在35-49岁者550例,50-60岁者745例,60岁以上者565例。病程在3个月至25年。
(15)
其中,Tfric为摩擦补偿转矩;[Tdf0,Tdmax]为摩擦补偿转矩线性区间;kf(v)为摩擦补偿系数;Tfmax为相应车速下的转向系统干摩擦;k1、k2为路感参数调节系数;kE为路感参数。
在增强低速区域内的转向轻便性的同时,还应考虑驾驶员路感的问题,因此在非线性摩擦补偿转矩中还应添加路感参数kE,以弥补摩擦补偿降低了驾驶员路感的问题。
路感可以认为是轮胎上的力矩传递到转向盘上,驾驶员对道路状况的感觉,常用路感强度值E来评价,即
E=dTd/dTR
(16)
其中,TR为转向负载。
EPS系统的力矩平衡方程可以表示为:
TR=Tmim+Td
(17)
在对路感分析时进行简化,忽略转向系统中的转动惯量和阻尼,则电机的助力矩为:
(18)

图7 摩擦补偿前、后对比
3.4 惯性及阻尼补偿
考虑系统的转动惯量和阻尼作用,电机的实际助力矩为:
(19)
代入(17)式可得:
(20)
考虑系统的惯性和阻尼后,在助力增益不变的情况下,按照助力特性,方向盘手力会比目标值大。驾驶者在快速转动方向盘时,黏性阻力产生较大的黏性阻力矩,使驾驶员快速转向时有转向沉重感。
紧急换向时,因为整个转向系统具有很大的转动惯量,所以会产生很大的瞬时转向阻力矩,使得驾驶者换向时会有明显的“顿挫”感。因此,为了克服电机的惯性及阻尼的影响,在转矩传感器检测力矩中加入惯性补偿及阻尼补偿力矩ΔTd,其表达式为:
(21)
据此搭建惯性及阻尼补偿仿真模型,并给予方向盘0.5 Hz的转角信号,如图8a所示,惯性及阻尼补偿前后对比如图8b所示。
由图8b仿真结果可知,惯性及阻尼补偿前,快速换向时,方向盘转矩有一个急剧的变化过程,而加入补偿后,转矩的波动次数及幅值明显比补偿前小,快速转向的“顿挫”感和转向沉重感得到一定的改善。

图8 惯性及阻尼补偿前、后对比
3.5 助力死区增大控制
补偿添加之后,在实车试验过程中发现,原地情况时大转矩信号下撒手,方向盘产生剧烈的抖动,因此采取基于转矩变化率的助力死区增大控制方案,其控制形式为:
0≤Δde≤1 N·m
(22)
其中,Δde为增大的助力死区转矩值;kde为助力死区调节系数;LastTd为上一次转矩信号采样值。
仿真中给予方向盘2.5 N的转矩阶跃信号,获得的电机电流对比如图9所示。由图9可知,5 s突然撒手后,未增大助力死区的电机电流波动较大,电机电流的波动导致电机的抖动,从而引起方向盘的抖动;添加助力死区增大控制方案后,原地撒手后电机的电流趋于稳定,方向盘的抖动现象也能得到明显的抑制。
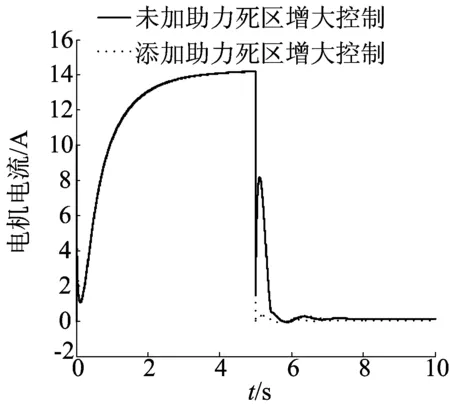
图9 原地撒手的电机电流对比
4 实车试验
4.1 快速转向及原地撒手试验
实车试验采用MC9S12XS128为主控芯片的EPS控制器。
快速转向试验结果如图10所示。由图10a可知,快速转向时的转角大小大致相同,但补偿前由于快速转向时较为沉重,因此其转角变化的频率明显低于补偿后的转角频率。由图10b可以看出,补偿后快速转向所需的转矩较小,转矩抖动的幅度降低,并且紧急换向时的“顿挫”感明显得到改善。

图10 原地快速转向补偿前后对比
3组撒手试验结果如图11所示。相同转角情况下,补偿后所需的转矩较小,并且撒手后的抖动也明显减少,稳定时间缩短。

图11 原地撒手转角、转矩对比
4.2 转向轻便性试验
按照国家标准GB/T 6323—2014[11]的要求布置双纽线行驶路径,并通过仪器获取3组汽车行驶过程中的转矩转角数据,其中1组数据如图12所示。

图12 补偿前、后转向轻便性对比图
根据3组转角转矩数据计算补偿前、后的转向盘作用功均值,其中补偿前转向盘作用功均值为141.3 J,补偿后未进行路感调节为94.5 J,进行路感调节后为105.9 J。同时路感调节前,转矩转角关系较为紊乱,驾驶员路感较差;路感调节后的转矩转角关系大致成线性递增关系,路感较为良好。因此,补偿后的转向轻便性和驾驶员的路感均得到很大程度的改善。
5 结 论
本文根据EPS系统各部分动力学方程建立相应的Simulink仿真模型,并指出时变性、非线性较强的EPS系统采用SNPID控制算法具有较好的动态补偿效果。由基本助力曲线控制下的EPS系统动态转向特性与转向轻便性的矛盾关系,给出相应的补偿策略,指出加入各补偿的原因,通过仿真结果指出各补偿的有效性。通过实车试验验证了加入助力补偿后的EPS系统能够改善其动态响应特性和转向轻便性。
[1] 王华强,袁浩,杨滁光.自适应模糊神经网络在EPS中的应用[J].合肥工业大学学报(自然科学版),2011,34(2):188-191.
[2] SAIFIA D,CHADLI M,KARIMI H R,et al.Fuzzy control for Electric Power Steering System with assist motor current input constraints[J].Journal of the Franklin Institute,2014,352(2):562-576.
[3] ZHAO W Z,SHI G B,LIN Y,et al.Tracking performance of electric power steering system based on the mixed H2/H∞strategy[J].Chinese Journal of Mechanical Engineering,2011,24(4):584-590.
[4] 王昭建.轿车EPS控制中助力补偿策略的台架试验研究[D].长春:吉林大学,2008.
[5] 夏甫根.电动助力转向系统控制策略的优化[D].北京:清华大学,2010.
[6] 魏建伟,魏民祥,李玉芳.主动转向干预时EPS助力修正控制策略与评价[J].中国机械工程,2012,23(15):1873-1876.
[7] MORITA Y,YOKOI A,IWASAKI M,et al.Controller design method for electric power steering system with variable gear transmission system using decoupling control[C]//2009 35th Annual Conference of IEEE Industrial Electronics.[S.l.]:IEEE,2009:3065-3070.
[8] 刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社,2011.
[9] ZHANG W D,AI Y B.Control research of torque compensation for electric power steering system based on feedforward expert system[C]//2010 International Conference on Management Science and Engineering.Wuhan:[s.n.],2010: 206-209.
[10] 赵玉霞.基于转向阻力矩的汽车转向特性研究[D].重庆:重庆理工大学,2013.
[11] 全国汽车标准化技术委员会.汽车操纵稳定性试验方法:转向轻便性试验:GB/T 6323—2014[S].北京:中国标准化出版社,2014.
(责任编辑 胡亚敏)
Research on assist compensation control strategy of EPS
JIANG Ping, ZU Chunsheng, ZHAO Linfeng
(School of Mechanical Engineering, Hefei University of Technology, Hefei 230009, China)
The dynamic models of electric power steering(EPS) system components are analyzed, with which the simulation model based on Simulink is established. For EPS system with stronger time-varying and nonlinear characteristics, the single neuron self-adaptive PID(SNPID) control algorithm is adopted. Concerning the poor dynamic response characteristic of the EPS system under general assist characteristic curve, compensatory torques are added to the detected torque of the torque sensor including the phase-lead compensation, the differential compensation which is used to deal with road shocks, the friction compensation which is used to reduce the impact on system from the friction of steering system and the inertia and damping compensation which is used to improve the insensitive performance of motor and the lock feeling of driver when fast turning or reversing. On the basis of the compensation above, in order to solve jitter in situ after relinquishing hands on steering wheel, a control scheme of enlarging the assist dead zone based on rate of torque change is put forward. The results of simulation and vehicle experiment show that the dynamic response characteristic is improved and the steering behavior is easier when the compensation control is contained in EPS assistance strategy.
electric power steering(EPS); single neuron self-adaptive PID(SNPID) control; assist compensation; steering easiness; road feeling
2015-07-27;
2015-09-14
国家自然科学基金资助项目(51375131);安徽省自然科学基金资助项目(2013AKZR0077)
姜 平(1974-),女,山东烟台人,博士,合肥工业大学副教授,硕士生导师.
10.3969/j.issn.1003-5060.2017.01.003
U463.44
A
1003-5060(2017)01-0012-07
猜你喜欢
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
数学年刊A辑(中文版)(2021年4期)2021-02-12
数学物理学报(2019年5期)2019-11-29
北方工业大学学报(2019年5期)2019-03-30
知识经济·中国直销(2018年3期)2018-04-12
传媒评论(2017年8期)2017-11-08
