
基于MACSV的双容水箱液位串级控制
2017-02-25 07:58柏受军赵广香
黑龙江工业学院学报(综合版) 2017年2期
柏受军,赵 发,赵广香
(安徽工程大学 电气工程学院,安徽 芜湖 241000)
基于MACSV的双容水箱液位串级控制
柏受军,赵 发,赵广香
(安徽工程大学 电气工程学院,安徽 芜湖 241000)
现代工业生产过程中许多被控对象都可以抽象成多容水箱的数学模型,其中水箱液位系统的建模和控制等方面的研究对设计真正的生产过程控制系统具有重要意义。由于目前水箱液位控制系统大多数都是基于PLC和组态软件的,而企业实际运行的工业过程控制系统很多都是集散控制系统,因此选择北京和利时DCS设计双容水箱液位控制系统,并针对传统PID控制精度不高的缺点,采用不完全微分PID控制算法。实验结果表明,使用和利时DCS的CFC编程语言不仅方便设计控制算法,而且极大地提高了控制系统的性能。
集散控制系统;双容水箱;不完全微分PID;MACSV
在工业过程控制系统中,液位是主要的被测热工参数之一,如污水处理池的水位、热电厂锅炉的水位、钢铁厂里钢水的液位等等,对液位进行精确控制将直接影响到产品的质量和控制性能。多容水箱是这些现代工业生产过程被控对象抽象出的数学模型,它可以模拟工业生产过程中的液位、流量、压力、温度等参数的测试和控制。目前对多容水箱的设计和控制算法已经做了大量的工作,其中绝大多数采用PLC作为控制器,组态软件作开发上位机人机界面的模式,[1-5]但是企业里的过程控制系统大多数采用集散控制系统。同时,传统的液位控制系统大多采用常规的PID控制,因为其结构简单,使用方便,但是水箱模型具有非线性、时滞性、时变性和多变量强耦合性等特点,因此常规的PID控制难以取得较好的控制效果。
鉴于上述原因,选择使用北京和利时公司的集散控制系统进行双容水箱液位控制,选用公司的主控单元和相应的模拟量输入和输出模块完成液位数据的采集和控制。控制系统的算法程序采用MACSV软件中的CFC语言进行编程,调用系统软件中的不完全微分PID对液位进行控制。实验结果表明,利用北京和利时公司的硬件产品和系统软件对双容水箱液位进行控制,提高了系统的控制精度。
1 双容水箱硬件系统
1.1 双容水箱系统结构及原理
双容水箱系统是由被控对象系统和控制系统两部分组成,它们使用两组电缆连接,其中一组为动力线,另一组为信号线,图1为双容水箱系统被控对象部分的结构图。

图1 双容水箱系统被控对象部分结构图
从图1可以看出,水箱液位系统的主要工作过程如下:在磁力驱动泵的驱动下,贮水箱中的水通过阀门F1-1、F1-2、F1-6进入上水箱,上水箱通过阀门F1-9流入下水箱,再通过阀门F1-11流回贮水箱。水箱底部安装压力传感器测量水位,将测量值传送至控制系统中。控制系统根据实际测量值与设定值之间的差值,再根据不完全微分PID控制器计算出控制量,调节电动调节阀改变上水箱的进入量,从而达到对水箱中的液位控制的目的。
1.2 双容水箱系统的机理模型
设下水箱流入量为Q1,下水箱流出量为Q2,液位h的变化反映了Q1和Q2不等而引起水箱中蓄水或泄水的过程。[6]根据动态物料平衡关系有
(1)
式中A为水箱截面积。将式(1)表示为增量形式
(2)
式中ΔQ1、ΔQ2、Δh分别为偏离某一平衡状态的增量。
由流体力学可知,流体在紊流情况下,液位h与流量之间为非线性关系,但是经线性化处理后,可近似认为Q2与h成正比关系,而与阀门的阻力R成反比,得
(3)
将式(2)、式(3)经拉氏变换并消去中间变量Q2,即可得到单容水箱的数学模型
(4)
式中T为水箱的时间常数,T=RC;K为放大系数,K = R; C为水箱的容量系数。
同理,双容水箱的数学模型为
(5)
式中K=K1K2,为双容水箱的放大系数;T1、T2分别为两个水箱的时间常数。
1.3 双容水箱系统设备组态
双容水箱的控制系统采用北京和利时公司的集散控制系统,又叫分布式控制系统,简称DCS(Distributed Control System)。该系统是对生产过程进行监视、控制和管理的具有数字通信功能的新型控制系统,是计算机技术、信息处理技术、测量控制技术、网络技术有机结合的产物,具有积木式的开放结构,可以根据具体的应用过程对系统进行扩展。
和利时公司的HOLLiAS系统中的直接控制部分的结构如图2所示。
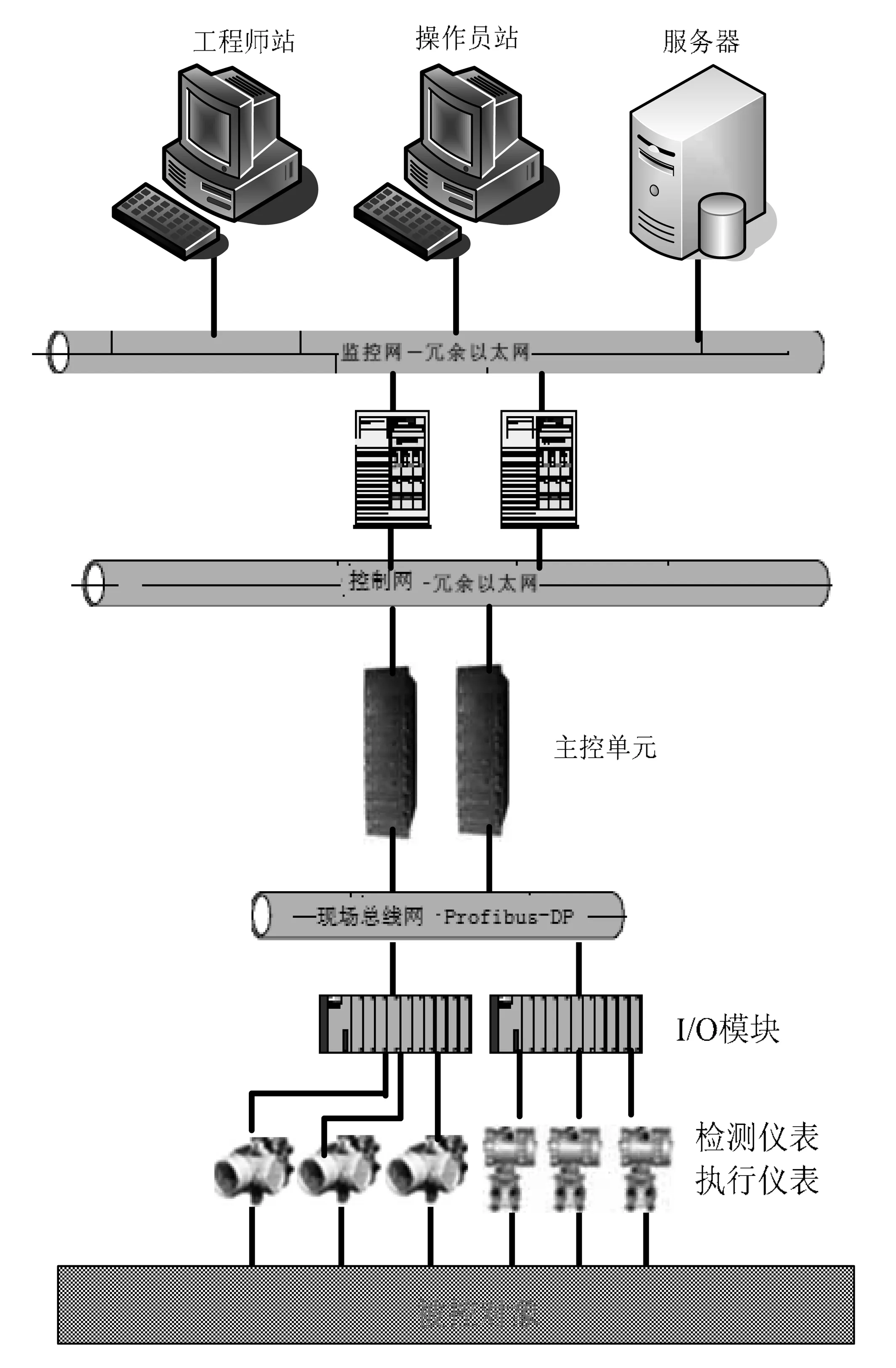
图2 HOLLiAS系统控制部分结构图
系统主要由现场仪表层、装置控制层、工厂监控管理层、企业经营管理层组成,图2中没有画出工厂监控管理层和企业经营管理层。现场仪表层把现场的各种物理信号,如温度、压力、流量等转变成电信号或数字信号,并进行一些必要的处理送到控制器中,或者把各种控制输出信号转变成物理变量,如阀位、位移等;装置控制层通过控制器,相对独立地完成对装置或设备实时控制任务,从而实现对生产过程的控制;工厂监控管理层主要由工厂管理和工厂监控(SCADA)两部分组成,其中工厂监控主要完成数据采集、数据的存储和分析、性能分析、操作集中显示、历史记录的产生与报表、各种报警处理等;企业经营管理层注重企业整体经营计划的制订和实施。[7]
双容水箱系统中主控单元使用FM802,电源模块使用FM901,主控单元和电源模块安装在4槽的FM305机笼中。智能I/O口模块中采集4-20mA信号的模块量输入模块使用FM148A,用于采集测量水位高度的压力传感器信号;4-20mA模块量输出模块使用FM151A,用于控制智能调节阀的阀门开启度。
系统硬件设备通过设备组态软件进行组态,图3为设备组态后的设备结构图,其中图3(a)为系统设备,实际使用时有一台服务器站,站号为0,一台操作员站,站号为50,一台现场控制站一台,站号为10;图3(b)为I/O口设备,一个模块量输入模块FM148A,设备号为2,一个模拟量输出模块FM151A,设备号为4。

图3 设备结构图
工程师站、服务器站和操作员站通过以太网和现场控制站相连,现场控制站再通过ProfiBus-DP现场总线与I/O口模块相连。
2 系统应用软件设计
双容水箱液位控制系统的应用软件开发基于和利时系统软件MACSV,通过数据库组态、算法组态和图形组态完成系统应用软件的开发。
2.1 数据库组态
根据系统控制功能的要求,需要2个液位传感器检测上、下水箱液位和1个4-20mA模拟量输出控制电动调节阀,控制水箱进水量。在数据库总控软件中对上述三个测点进行数据库组态。组态后的AI数据如表1所示,AO数据如表2所示。

表1 添加到数据库中AI数据变量

表2 添加到数据库中AO数据变量
2.2 算法组态
为了改善系统的动态特性,提高系统抗扰动能力和鲁棒性,使其具有一定的自适应能力,将系统设计成串级控制系统。下水箱为主控制回路的控制对象,下水箱的液位为系统的主控制量;上水箱为副控制回路的控制对象,上水箱的液位为系统的副控制量。主调节器的输出作为副调节器的给定,即副控回路是一个随动制系统。
主、副调节器都设计成不完全微分PID调节器,算法组态后的控制方案如图4所示。
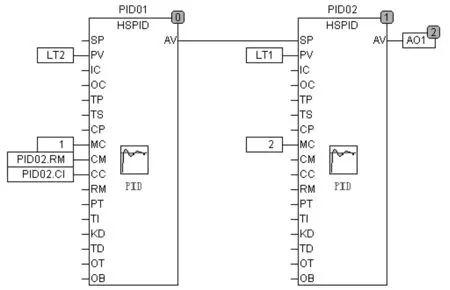
图4 双容水箱液位控制系统控制方案
图4中PID01为MACSV系统软件集成的不完全微分PID程序块,作为系统的主调节器,LT2为下水箱液位实际测量值,程序块的输出作为PID02程序的设定值; PID02为系统的副调节器,LT1为上水箱液位实际测量值,程序块的输出作为电动调节阀的输入调节量。
2.3 图形组态
利用MACSV系统软件中的图形组态工具绘制工艺流程画面,让操作人员通过操作员站上的工艺流程画面对现场运行情况一目了然,从而方便地监控现场运行。根据控制系统操作要求,设计的工艺流程画面如图5所示。
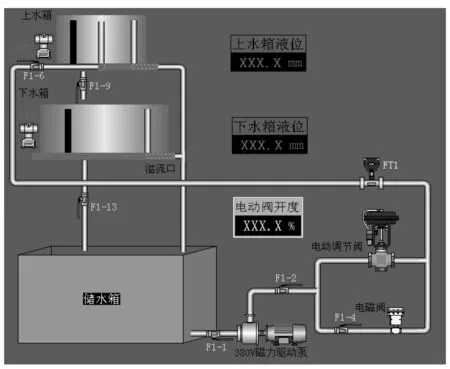
图5 系统工艺流程画面
3 系统调试与分析
系统经过前面的设备、数据库、算法和图形组态,编译就可生成可执行文件,最后通过工程站下装软件将文件下装到服务器和操作员站。运行服务器和控制器,启动操作员站利用图5的工艺流程监控画面,进行系统调试。先根据经验值,对HSPID1和HSPID2的P、I、D参数进行整定,再通过不断调试,优化PID参数使用双容水箱性能指标满足实际需要,图6是设定值为50mm后的运行曲线图,从图中可以看出,液位稳定的时间不到2分钟。

图6 水箱液位实际运行曲线图
4 结论
为了有效研究工业生产过程中液位等重要热工参数的控制,使用北京和利时DCS系统对抽象的数学模型双容水箱的液位进行控制,算法组态时使用MACSV系统软件中的不完全微分HSPID程序块。先根据PID参数的经验值,再根据实际不断
调试优化。实验结果表明,该系统对水箱液位控制具有精度高、实时性好等优点,这也为以后设计液位、温度及流量的多变量解耦控制系统奠定了基础。
[1]宋清昆,曹剑坤,韩笑,等.关于三容水箱系统水量液位优化控制研究[J].计算机仿真,2016(5):330-334.
[2]郑华,吕伟珍.基于组态王和Matlab的双容水箱液位控制[J].中国农机化,2012(2):155-157.
[3]史运涛,何安.基于SIMATIC PCS7的预测控制在2×2耦合四容水箱系统的控制实现[J].化工自动化及仪表,2014(8):887-890.
[4]武贵洲.基于PID神经网络算法在多容水箱控制策略的研究[D].哈尔滨理工大学,2015.
[5]张倩.基于S7_300PLC的模糊解耦控制对水箱液位控制的研究 [D].燕山大学,2014.
[6]党长青.基于多容水箱系统数学模型的研究[D].贵州大学,2015.
[7]王常力,罗安.分布式控制系统(DCS)设计与应用实例:第3版[M].北京: 电子工业出版社,2016.
Class No.:TP212 Document Mark:A
(责任编辑:宋瑞斌)
Cascade Control of Two-tank Level Based on MACSV
Bai Shoujun, Zhao Fa, Zhao Guangxiang
(School of Electrical Engineering, Anhui Polytechnic University, Wuhu, Anhui 241000,China)
In the process of modern industrial production, many controlled objects can be abstracted into the mathematical model of multi-tank, in which the modeling and control of the tank level system is of great significance to the design of real production process control system. Most of the current tank level control system is based on PLC and configuration software, but the actual operation of industrial process control systems are distributed control system. In this paper, the design of two-tank level control system based on Beijing Hollysys DCS is designed. In order to overcome the shortcomings of traditional PID control, the incomplete differential PID control algorithm is adopted. The experimental results show that the CFC programming language of DCS can not only facilitate the design of control algorithm, but also greatly improve the performance of the control system.
DCS; two-tank ; incomplete differential PID; MACSV
柏受军,硕士,讲师,安徽工程大学。
安徽省高等学校省级质量工程项目(2015xnzx009);安徽省高等教育省级振兴计划项目(2015zdjy083);高等学校省级优秀青年人才基金项目(2012SQRL219)。
1672-6758(2017)02-0030-4
TP212
A
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
仪器仪表用户(2022年4期)2022-04-01
河北农机(2020年10期)2020-12-14
凿岩机械气动工具(2017年2期)2017-07-19
自动化博览(2017年2期)2017-06-05
中国铸造装备与技术(2015年5期)2015-12-10
凿岩机械气动工具(2015年3期)2015-11-11
汽车维护与修理(2015年2期)2015-02-28
自动化博览(2014年12期)2014-02-28
自动化博览(2014年12期)2014-02-28
