基于模糊控制的自动泊车轨迹研究及仿真
2017-02-22 08:01李社蕾周望月
计算机技术与发展 2017年2期
李社蕾,张 潇,周望月
(三亚学院 理工学院,海南 三亚 572022)
基于模糊控制的自动泊车轨迹研究及仿真
李社蕾,张 潇,周望月
(三亚学院 理工学院,海南 三亚 572022)
平行泊车技术对驾驶人员来说是众多驾驶技术中比较难掌握的一种,因为在泊车的过程中,一方面驾驶员的视线会受到一定程度的遮挡,另一方面,在倒车过程中驾驶员既要注意规避车辆后方的障碍物,同时又要注意车的左右两边不能蹭到障碍物,这对驾驶员,尤其是那些驾驶技术并不熟练的驾驶员来说,确实有一定的难度。研究了辅助平行泊车的路径规划问题,引导车辆从设定位置,根据指定的点和线的位置,改变方向盘的转向无碰撞地泊车入位。针对车辆的平行泊车路径规划问题,借助于驾校教练的泊车经验,提出了一种基于模糊控制的三段式的路径规划方法,进一步平滑化了泊车路径。仿真结果验证了该方法的有效性和实用性,为自动泊车路径的规划提供了参考。
平行泊车;模糊控制;路径规划;仿真
0 引 言
对于驾驶员来说,平行泊车技术是众多驾驶技术中比较难掌握的一种。因为在泊车的过程中,一方面驾驶员的视线会受到一定程度的遮挡,另一方面,在倒车过程中驾驶员既要注意规避车辆后方的障碍物,同时又要注意车的左右两边不能蹭到障碍物,这对驾驶员,尤其是那些驾驶技术并不熟练的驾驶员来说,确实有一定的难度。但对于从来没有操作过车的学员,在驾校根据教练讲授的方法,给出的一些点和线,在点和线的位置做出相应的控制,经过几个小时的训练之后,只要车速控制好就能实现正确泊车,并且顺利通过驾驶员考试。
借助于驾校教练的泊车经验,事先将车停在指定位置,开始泊车。泊车过程分为,方向盘打满右,回正和方向盘打满左三个阶段,其间根据一些点和线的位置来确定方向盘的转向,然后加入模糊控制,实现平行泊车进入车位。
1 汽车动力学模型
汽车的转向是由地面的侧向力提供的向心力,只有当四个轮子的轴线交于一点时,才能保证各轮纯滚动而不滑动。汽车设计时,为了避免汽车转向时产生的路面对汽车行驶的附加阻力和轮胎的过快磨损,要求车辆的转向系统能保证在汽车转向时,所有汽车均作纯滚动运动[1]。此交点O称为转向中心。方向盘转角确定时车辆的转弯半径是不变的,因此只要知道车身的位置和车身的偏角,车辆的运动轨迹也就确定了[2]。车身上任意一点的轨迹均为一个标准圆,即后轮中心点的运行轨迹也是一个标准圆。
研究车辆行驶过程中的运动轨迹,建立车辆泊车过程的动力学模型[3-4],车辆运动学模型如图1所示。
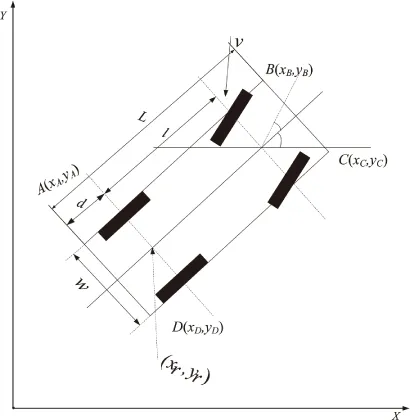
图1 车辆运动学模型
其中,(xr,yr)为后轮轴中心点的坐标;v为前轴中心点速度;l为前后轮轴距,即车辆前后轮轴中心点连线之间的距离;w为车身宽度;φ为前轮的Ackerman转向角;θ为车辆中心轴与水平方向的夹角,即车身与x轴方向的夹角。在图1所示的坐标系中,车辆的运动轨迹可以用(xr,yr,θ)表示,直接控制输出量为φ。完成平行泊车时应有φ=0(或接近零度角)[5-8]。
由后轴中心点坐标(xr,yr),车辆车身四个顶点的坐标为[9-12]:
(1)
(2)
(3)
(4)
文中选择一款轿车整车参数建立了汽车模型,该款车的部分参数为:车长4.3m,车宽1.735m,轴距2.465m,后悬0.944m,最小转弯半径5.2m。实际仿真过程中,取车长4.3m,车宽1.74m,轴距2.5m,后悬0.944m,最小转弯半径5.2m。
2 入库过程路径规划
根据教练的经验,平行泊车的步骤如下:
(1)将车停在车位和下一车位的后边线对齐,与其外边线的距离为0.5m左右。
(2)方向盘右打死,行驶到左侧后视镜看到泊车位的右后角位置;此时,由图2可知:
(5)
(6)
其中,车位宽2.5m,车与车位间距0.5m,车宽1.74m,a=车位长(7m)+后悬长(0.944m)=7.944m;R为后轴外半径。
由式(5)和式(6)可求得θ=36.316 8°。
(3)方向盘回正,行驶到左后车轮接近车位的外边线。
(4)方向盘左打死,至车身与两侧边线平行,回正车轮,停车。
整个泊车过程如图2~4所示。
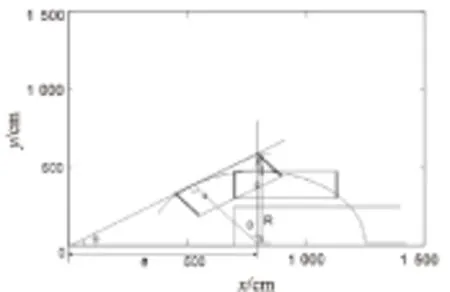
图2 左侧后视镜看到泊车位的右后角位置

图3 行驶到左后轮压线的位置
3 平行泊车模糊控制器的设计
综合控制精度和响应速度两方面考虑,在保证控制精度的前提下[13-14],选取后轮中心点的坐标xr,yr以及θ为模糊控制器的输入,deta_theta为模糊控制器的输出量。设定输入量x和y的模糊集合数都为4,S
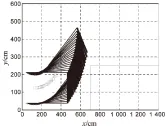
图4 方向盘左打死入库回正
(小)、LB(较大)、B(大)、VB(非常大);设定输入量θ的模糊集合数为3,N(负)、Z(零)、P(正);设定输出量deta_theta的模糊集合数为7,NB(负大)、NM(负中)、NS(负小)、Z(零)、PS(正小)、PM(正中)、PB(正大)。x的范围为[0,800],y的范围为[0,400],θ的范围为[-45°,45°],输出变量deta_theta的范围为[-45°,45°]。
文中采用的隶属度函数如图5所示。
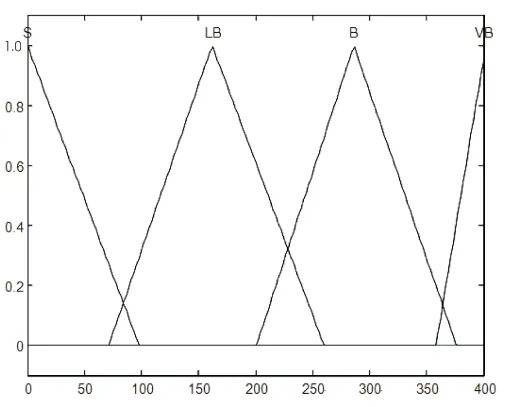
(a)输入量y的隶属度函数
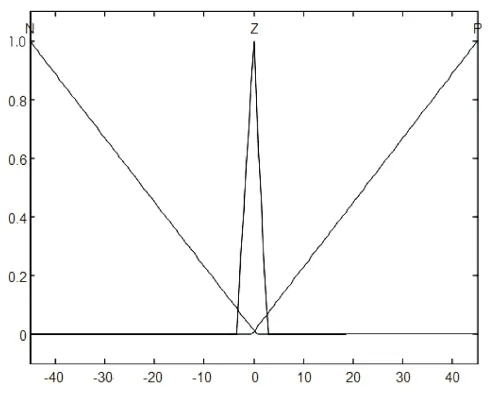
(b)输入量θ的隶属度函数
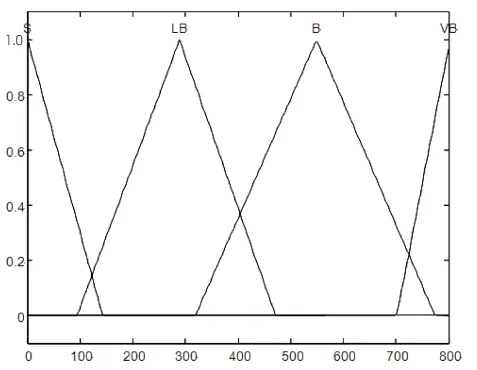
(c)输入量x的隶属度函数
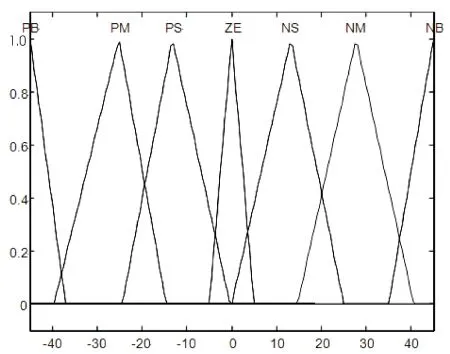
(d)输出量deta_theta的隶属度函数
表1是在总结教练的平行泊车经验的基础上建立的模糊规则(分析汽车在泊车位右侧的情况)。当汽车x和y都为VB,还没有进入停车位,如果θ为零,则保持车身方向不变,继续到车,如果θ为负,则快速顺时针转动方向盘,如果θ为正,则稳定方向盘,继续倒车;当x和y为B时,如果θ角为正,快速逆时针转动方向盘,如果为θ零,则稳定方向盘,继续倒车,如果θ角为负,快速顺时针转动方向盘;当x和y为LB,如果θ为零,快速逆时针转动方向盘,如果θ为正,快速逆时针转动方向盘,如果θ为负,则稳定方向盘,继续倒车;当x和y为S时,如果θ为正,快速逆时针转动方向盘,如果θ为负,则快速顺时针转动方向盘,如果θ为零,回正车轮停车,泊车成功。
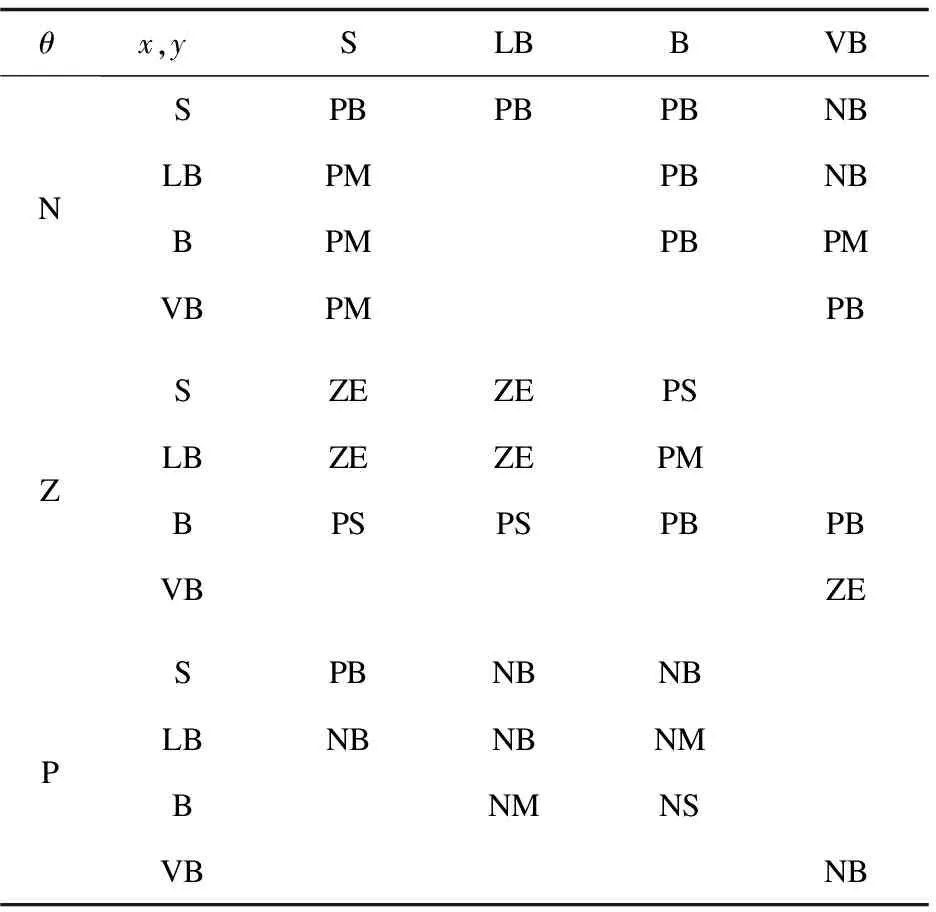
表1 平行泊车模糊控制器的模糊规则集
4 仿真结果
车型选择小轿车,车位长度为7m,车位宽度为2.5m,对车辆平行泊车的过程进行仿真。待泊车辆的车宽为1.74m,车长为4.3m,最小转弯半径为5.2m,车的起始位置与车位外边线平行,距离用D1表示,车尾与前一车位的后边线距离用D2表示(超过为正,未达到为负)。
根据汽车的运动学模型,在Matlab中搭建停车位、汽车等仿真环境,将模糊控制器引入该系统,模拟汽车以5km/h的车速的平行泊车过程。仿真结果如图6所示。
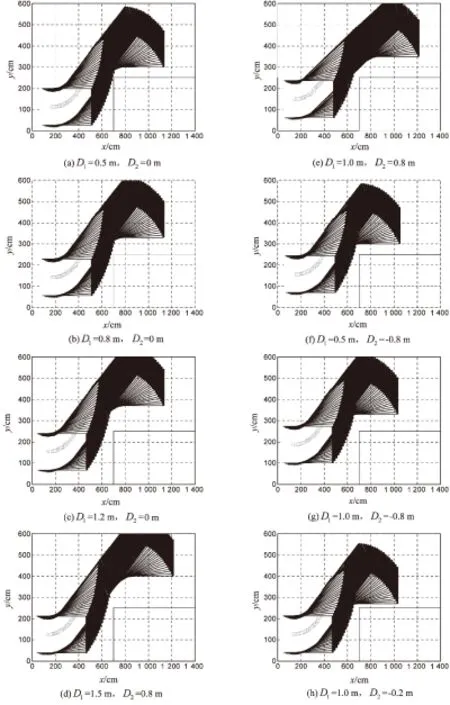
图6 泊车过程仿真
从图6可以看到,在模糊控制下,如果将初始位置调整到距车位距离0.5~1.5m,车尾和下一车位的后边线的前0.8m和后0.8m的范围内,汽车都可以无摩擦地实现良好泊车,并摆正车身。经过对图6分析可以发现,当D2为零时,D1越大,路面要求越宽;当D2为正且较大时,D1小于1m容易与车位内边线摩擦;当D2为负且较大时,D1过小,容易与车位后边线摩擦。
5 结束语
基于三段式泊车方法,进行辅助平行泊车路径的规划。从理论上验证了方案的可行性,并加入模糊控制算法。仿真结果表明:汽车初始位置在一定范围内,车位的长度大于车长的1.39倍,均可以实现无摩擦的良好泊车,可以扩展到不同车型和车位的情况,为智能泊车系统的开发提供了参考,同时为驾驶员控制泊车过程提供了理论依据。
[1] 陈家瑞.汽车构造下册[M].第3版.北京:机械工业出版社,2009:248-249.
[2] 张 野,陈 慧,程昆朋.基于两步法的平行泊车分段路径规划算法[J].计算机仿真,2013,30(6):169-173.
[3] 林蓁蓁,李 庆,梁艳菊,等.一种基于路径规划的自动平行泊车算法[J].计算机应用研究,2012,29(5):1713-1715.
[4] 刘 姣,葛召炎,谢 静,等.停车场泊车问题的研究与仿真[J].计算机仿真,2011,28(7):340-344.
[5] 曲 龙.基于MATLAB的自动泊车系统仿真研究[D].沈阳:沈阳理工大学,2013.
[6]ParomtchikIE,LaugierC.Autonomousparallelparkingofnonholonomicvehicle[C]//ProceedingsoftheIEEEintelligentvehiclesymposium.[s.l.]:IEEE,1996:3117-3122.
[7] 张 勤,曲宁玺,李 艳,等.自动泊车轨迹生成方法的研究[J].计算机仿真,2010,27(10):148-151.
[8]KimD,ChungW,ParkS.Practicalmotionplanningforcar-parkingcontrolinnarrowenvironment[J].IETControlTheory&Applications,2010,4(1):129-139.
[9] 侯晓阳.基于路径规划的平行泊车系统研究[D].北京:清华大学,2015.
[10] 孙 思.自动垂直泊车系统转向控制策略的研究[D].北京:清华大学,2015.
[11] 宋金泽.自主泊车系统关键技术研究[D].长沙:国防科学技术大学,2009.
[12] 张啸尘.基于计算机视觉的车位检测与倒车辅助算法的研究与实现[D].沈阳:东北大学,2011.
[13] 秦绪情.自动平行泊车系统定车速模糊控制算法研究[D].长春:吉林大学,2007.
[14] 郭孔辉,姜 辉,张建伟,等.基于模糊逻辑的自动平行泊车转向控制器[J].吉林大学学报:工学版,2009,39(S2):236-240.
Simulation and Study of Automatic Parallel Parking Path Based on Fuzzy Control
LI She-lei,ZHANG Xiao,ZHOU Wang-yue
(Polytechnical School of Sanya College,Sanya 572022,China)
Parallel parking skill for driver is difficult to master.Because in the process of parking,the driver’s line of sight will be blocked by a certain degree.On the other hand,in the process of reversing,the driver should not only pay attention to avoid the obstacles in the rear of the vehicle,and at the same time,attention should be paid to the right and left sides of the car can’t touch the obstacles.The drivers,especially those unskilled,do have some difficulty.The path planning problem of auxiliary parallel parking is studied,which is to guide the vehicle from the set position,according to the location of specified point and line,turning the steering wheel and parking into the place without collision.With the help of parking experience for the driving coaches,a three-step path planning method is proposed based on fuzzy control,further smoothing the parking path.The simulation results demonstrate the validity and practicality of the proposed method,and provide a reference for the automatic parking path planning.
parallel parking;fuzzy control;path planning;simulation
2015-10-26
2016-03-03
时间:2017-01-10
海南省大学生创新创业训练计划项目(201513892009)
李社蕾(1979-),女,讲师,硕士研究生,研究方向为智能算法。
http://www.cnki.net/kcms/detail/61.1450.TP.20170110.1010.034.html
TP391.9
A
1673-629X(2017)02-0163-04
10.3969/j.issn.1673-629X.2017.02.037
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年7期)2022-04-20
成都信息工程大学学报(2021年6期)2021-02-12
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
军民两用技术与产品(2020年3期)2020-04-07
电子制作(2019年16期)2019-09-27
现代家长(2018年11期)2018-01-05
汽车零部件(2015年5期)2015-01-03