一种改进的Surendra运动目标伪装效果检测方法
2017-02-20 01:34:14杨骏堂许卫东曲杨崔光振
兵工学报 2017年1期
杨骏堂, 许卫东, 曲杨, 崔光振
(解放军理工大学 野战工程学院,江苏 南京 210007)
一种改进的Surendra运动目标伪装效果检测方法
杨骏堂, 许卫东, 曲杨, 崔光振
(解放军理工大学 野战工程学院,江苏 南京 210007)
现有的伪装检测主要是针对静态目标,并不能客观反映机动装备在作战行动中伪装的有效性。综合运动目标检测技术,结合伪装学原理,以军用卡车模型作为研究对象,基于Surendra背景更新建模算法并结合Lab三通道,提出一种机动装备迷彩伪装效果检测方法。根据所建立的实验系统,计算序列图中军用卡车伪装前后的形状特征参数集合之间的欧氏距离,得到实验序列图像的欧氏距离平均值为189.45,说明实验系统中伪装前后运动目标的形状特征参数之间极不相似,即经过伪装后的目标更具有一定的动态变形伪装特性。借助性能评价模块得出伪装前后目标图像相关系数范围为0.003 5~0.127 5,证明了该检测方法的科学性和可靠性;根据检测运动目标的算法原理,可知伪装后的运动目标图像与其中心背景之间更具有一定的融合性。
兵器科学与技术;运动目标;迷彩伪装;数码迷彩;效果检测
0 引言
坦克、自行火炮、步战车等是部队实施作战任务的主要机动装备,是陆军战斗力的象征,在未来基于信息系统的体系作战中具有举足轻重的作用。当前世界各国陆军主战武器装备在运动状态下,主要采用迷彩伪装降低目标显著性,提高其战场生存能力[1]。
伪装检测作为伪装技术的重要组成部分[2],是指依据战术技术要求,对目标的伪装效果和伪装器材的伪装性能进行的检验和测定。外军先后发展了光谱检测手段、多波段成像检测、合成孔径雷达检测等手段,在实战型检测方面,美国进行了伪装/隐蔽和欺骗研究,在丹麦某基地利用A-10攻击机携带成像装置检测伪装器材的热红外伪装性能。奥地利开发了用于量化观察者感觉反应的图像仿真系统,并用于伪装效果检测。经过多年发展,我军研制并装备伪装勘察检测车,发展了基于氦气艇、直升机航模、多旋翼无人机搭载光学、红外系统的伪装检测空中平台。但现有的伪装检测主要针对静态目标检测[3],还不能客观反映上述机动装备在作战行动中伪装的有效性,与考察伪装装备的作战应用真实状态还有一定差距。与此同时,动态目标检测跟踪技术作为计算机视觉跟踪技术研究的核心问题之一,现已广泛应用于探测制导、目标预警、安防监控等领域[4~7]。本文综合运用动态目标检测与伪装效果检测技术,以军用卡车数码迷彩为研究对象,探讨机动装备迷彩伪装效果检测方法。
1 迷彩伪装设计基本原则
迷彩伪装是武器装备常见的伪装方法,它可以减小目标与背景的颜色差别,达到降低目标显著性和改变外形的效果。迷彩伪装可分为保护迷彩、变形迷彩和仿造迷彩。其中变形迷彩是由与背景相似颜色的各种不规则斑点构成的多色迷彩,而数码迷彩是通过色块的多种排列组合,使得不同颜色间的边缘模糊、破碎、利用空间混色和视错觉效应,极易模拟自然背景,具有普通迷彩所无法比拟的优点[8~9]。近年来其相关研究得到国内外业界的高度重视。它可用于伪装斑驳背景上的运动目标,能使运动目标在活动地域内的多种背景上都产生变形效果。
在较为理想情况下,经过迷彩伪装后的武器装备应与背景达成融合,装备规则外形轮廓得到歪曲:一是由于目标上变形迷彩的不定形斑点歪曲了目标的直线轮廓;二是目标上变形迷彩部分斑点的颜色与背景的颜色近似一致,部分斑点的颜色与背景的颜色保持明显的差别,使目标产生变形的伪装效果。
在设计变形迷彩斑点时,当前主要遵循反良好图形的原则。良好图形乃是多余的图形,因为它的整体是很容易从部分预测出来的,而反良好图形不能从部分预测出来,所以不是多余的[10]。 一个图形的良好性与它可能得到的变换图形数目成反比,即可能变换的图形越多,“良好性”越差。研究表明,被试者描述某一形状时所用的言语越长,则识别该图形的准确性就越小。在对于无意义形状的复杂性所作的判断中,90%可以用分散度、伸长度、凹凸性、偏心度等因素的一个加权组合来加以说明[11]。
2 动态目标检测技术概述
动态目标检测的目的是根据图像帧序列从背景图像中将运动的人员、车辆等感兴趣的目标提取出来。常见的动态目标检测方法主要有背景相减法、帧差法和光流法。
帧差法是在连续图像序列中两个或3个相邻帧间采用基于像素的差分,设定阈值,通过阈值差分提取出图像中的运动目标。该方法可以准确确定动态目标的具体位置,但是由于重叠的存在导致检测目标不完整。同时差分的时机选择,动态目标的速度很大程度上也影响了检测结果。
光流法是采用运动目标随时间变化的光流特性,优点是在CCD摄像头转动的前提下也能检测出独立的运动目标,但是大多数光流法计算相当复杂,而且抗噪性能差,如果没有特别的硬件装置则不能满足全帧视频流的实时处理。
背景相减法基本思想就是构建一个背景模型,再用当前帧和背景模型做差,根据差分图像检测运动目标。常用的背景建模算法有多帧平均法,该方法运算简单,但建立起来的背景图像精确度不高,不能实时更新;混合高斯模型法是一种基于统计的方法,此算法建立的背景图像准确度高,但是运算量大且背景更新缓慢;Surendra背景更新建模算法能够自适应地获取背景图像,且精度高,运算量相对较小[12]。另外,一般的差分法都是采用灰度差值来实现,而对于对比度较低的场景,物体与背景的灰度值相近,可利用的灰度信息太少,可能造成的导的目标区域出现空洞不完整。Pan等[13]分析了运动目标在多种颜色空间下的信息变化情况,以及不同色彩空间下的像素特征对目标检测算法性能的影响,证明了基于Lab颜色空间的运动目标检测算法具有更高的检测率和更低的误检率。
3 基础实验模型的建立
3.1 实验设计
为了检测机动装备迷彩伪装效果,为未来分析在运动状态下影响目标动态伪装效果的主要因素和规律提供技术支撑,本文基于Surendra算法进行背景建模并在Lab颜色空间下进行差分,检测出伪装前后的机动装备。实验总流程如图1所示。

图1 实验总流程图Fig.1 General flow chat of experiment
为了实现迷彩伪装前后机动装备的检测,本实验制作了如图2所示的视频(截取第135帧),其中上方为伪装前的军用卡车,下方为实施数码变形迷彩伪装后的军用卡车,两车均处于同一林地背景条件下,同步做匀速直线运动。此时,对应视频时长15 s,总帧数为375.

图2 实验视频第135帧Fig.2 135th frame of experimental video
如果考虑到所采集的视频噪声较大、光照条件突变、背景扰动等影响因素时,可采用中值滤波去噪等方法进行视频预处理。本文采集的视频经预处理后,导入运动目标检测模块中,采用数据分析模块提取相关特征参数,再以性能评估模块考察机动装备迷彩伪装效果。
3.2 运动目标检测模块算法实现
该模块采用的算法主要包括Lab颜色空间转换、Surendra自适应背景更新、最大类间方差(Otsu)自适应二值分割、利用更新后的背景进行运动目标检测等,其主要思想如图3所示。
首先将获取的每一帧图像进行Lab颜色空间转换,分别选取L、a、b 3通道的第1帧图像作为初始背景图像,利用surendra算法进行自适应背景更新,其主要步骤如下:
1) 将第1帧图像I0作为背景B0.
2) 选取阈值T,迭代次数初始化为m=1,最大迭代次数为M.
3) 求当前帧的帧差分图像
(1)
式中:Ij、Ij-1分别为当前帧和上一帧图像。
4) 将二值图像DB更新背景图像
(2)
式中:Bj(x,y)、DB为背景图像和差分二值图像在坐标(x,y)处的灰度值;Ij为输入的第j帧图像;α为迭代速度系数。当m=M时,迭代结束,得到真正的背景图Bj(x,y). 用当前帧与得到的背景利用Otsu算法进行自适应二值分割,最后将二值图像进行形态学处理,从而检测出运动目标。
4 结果分析
分析结果表明,上述系统能较好地检测出运动状态下的武器装备,表明武器装备的机动本身就是一项重要的暴露征候,特别是在b通道的检测下,未实施数码迷彩伪装的军用卡车呈现出原有规则轮廓,而经数码迷彩伪装后的军用卡车仅仅表现为若
干处于运动且不断变化的斑点,难以反映出原有的规则轮廓。以典型绿色卡车处于林地背景为检测条件时,背景与目标之间的亮度差别本身不够明显,故在L通道上不能精确反映军用卡车的规则轮廓;所采用的林地背景中,大部分斑点为不同饱和度的绿色、沙土色,a通道下背景与目标之间的颜色差别也不够明显,故也不能精确反映迷彩斑点的不规则轮廓[14]。为说明问题,节约篇幅,图4(a)~图4(f)分别给出运动检测结果中的6帧图像。

图4 动态伪装效果检测过程序列图Fig.4 Sequence diagram of dynamic camouflage effect detection
为了定量考察伪装检测的有效性,本文基于Matlab软件,利用bwlabel函数、regionprops函数,计算出序列图中所呈现的军用卡车及各个迷彩斑点的分散度、偏心度、2阶矩等数据,表1为第100帧图像中相应的特性参数。

表1 第100帧图像中特性参数Tab.1 Characteristic parameters of 100th frame
若军用卡车采用的迷彩伪装具有良好的效果,则迷彩伪装前后军用卡车与迷彩斑点特征参数之间应具有较大的欧氏距离[15],否则二者的欧氏距离较小。本文计算了序列图中的军用卡车及迷彩斑点特性参数之间的欧氏距离,结果表明375帧图像的欧氏距离平均值为189.45,表明迷彩伪装后斑点的分散度、伸长度、偏心度等特征参数与原有军用卡车的特征参数具有很大的差别,具有良好的动态变形伪装效果。
本文在性能评价模块中计算了序列图中所呈现的军用卡车及各个迷彩斑点之间的相关系数,借以考察本方法的可靠性,其基本模型[16]如下:
假设军用卡车图像为S,大小为M×N,迷彩斑点图像为g,大小为m×n. 用Sx,y表示S中以(x,y)为左上角点与g大小相同的子块。计算对比图像与标准图像之间的相关系数。ρ(x,y)的定义为
(3)
式中:σ(Sx,y,g)是Sx,y和g的协方差;Dx,y为Sx,y的方差,
(4)
D为g的方差,
(5)

所统计的军用卡车与迷彩斑点图像相关系数曲线如图5所示。由于本文的运动目标是通过视频当前帧与经过背景建模更新后的背景帧差分得到的。说明经过本文算法检测过后的运动目标图像与其所在的中心背景图像(视频图像中被目标遮挡住的背景)有密切的关系,如果运动目标与其中心背景局部相似,则差分后得到的运动目标图像便会呈现与中心背景相关的图像。正常情况下,未实施伪装的目标与其中心背景之间往往存在较大的差别。这也是为什么我们能够轻易判别未伪装目标的重要原因。相反,伪装后的目标会与中心背景呈现一定的融合性。
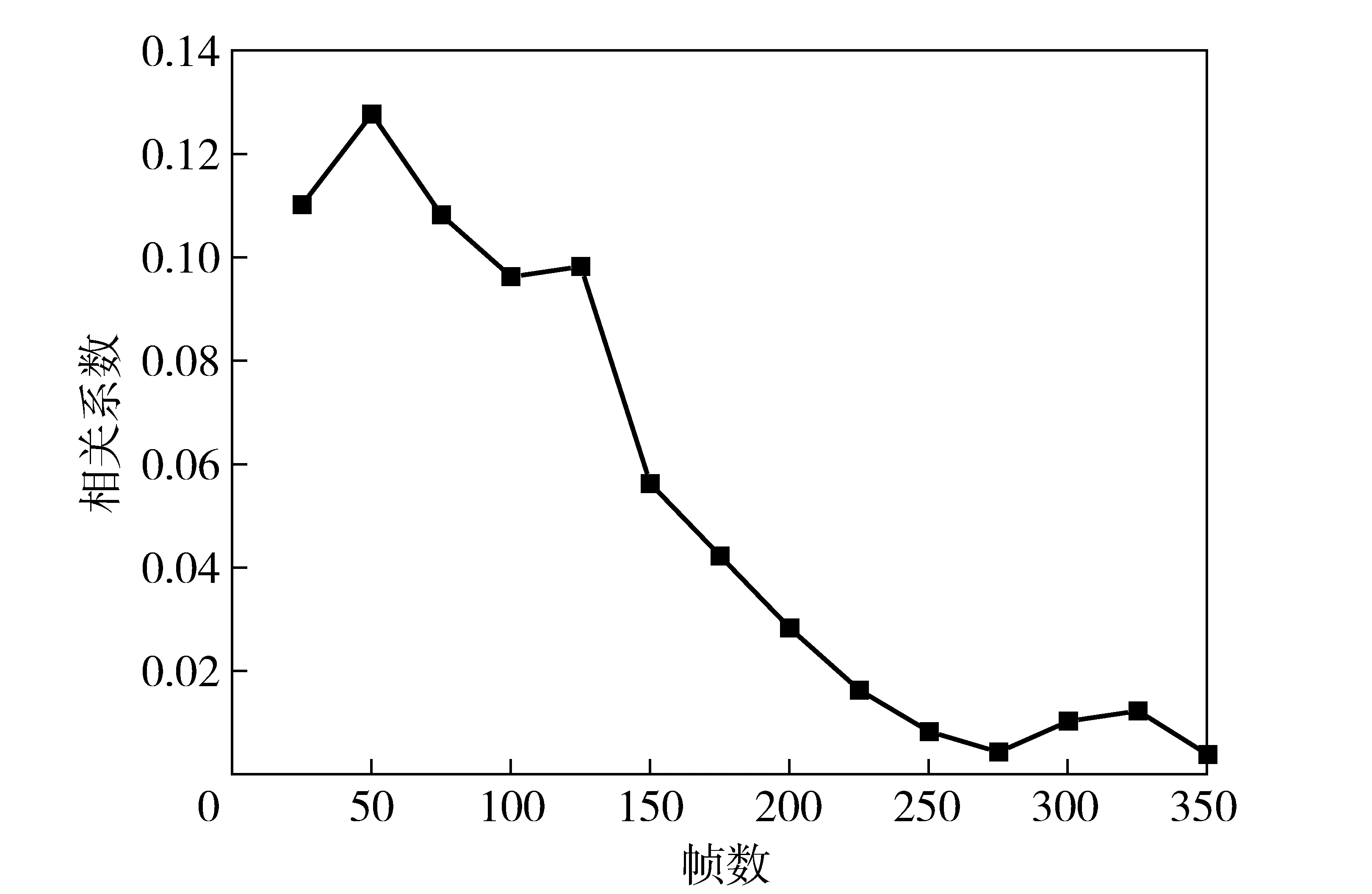
图5 军用卡车与迷彩斑点图像相关系数曲线Fig.5 Correlation coefficient curve of military truck and camouflage spot
如果伪装前后运动目标图像之间越相似,则说明伪装后目标图像与中心背景图像越不相似,即与背景不相融合。反之,如果伪装前后运动目标图像差别越大,则说明伪装后目标图像与中心背景图像越相似,即与背景越相融合。
根据文献[2]可知,图像之间相关程度的允许差别区间可确定为:5%~25%,由此可反推出伪装前后运动目标特征相关系数值标准。当伪装前后目标图像特征相关系数大于0.75时,表明伪装前后目标图像特征非常相似,仅靠人眼便可轻松判别;当伪装前后目标图像特征相关系数范围为0.65~0.75时,表明伪装前后目标图像特征比较相似;当伪装前后目标图像特征相关系数范围为0.55~0.65时,表明伪装前后目标图像特征基本相似。在本文实验实验背景条件下,从曲线可见,军用卡车经过数码迷彩伪装后检测得到的斑点与原有卡车图像的相关系数范围为0.003 5~0.127 5,远远小于相似范围标准,即可认为该运动目标在伪装前后的图像之间非常不相似,表明经过数码迷彩伪装后的运动目标与其中心背景更具有一定的融合性。同时也验证了基于欧式距离得出的结论,即后者更具有良好的动态变形伪装效果。
5 结论
1) 本文基于动态目标检测与伪装检测技术,以军用卡车数码迷彩为研究对象,提出了一种基于Lab 3通道的运动目标伪装效果检测方法。
2) 计算了序列图中的军用卡车及迷彩斑点特性参数之间的欧氏距离平均值为189.45,表明数码迷彩伪装后斑点的分散度、伸长度、偏心度等特征参数与伪装前军用卡车的特征参数具有很大的差别。
3) 采用性能评价模块计算伪装前后目标图像相关系数范围为0.003 5~0.127 5,表明伪装前后目标图像之间极不相似,根据本文检测运动目标的算法原理,可知伪装后的目标图像与其中心背景之间更具有一定的融合性。
鉴于机动装备伪装方法较多,涉及器材较广,下一步还需研讨此类方法运用于不同对象的适应性。
References)
[1] 姚永平. 陆军装备伪装研究[M]. 北京:军事科学出版社,2010:22-24. YAO Yong-ping. Research on army equipment camouflage[M].Beijing: Military Science Publishing House, 2010:22-24.(in Chinese)
[2] 许卫东,王向伟. 伪装检测与效果评估理论和技术[M]. 北京:国防大学出版社,2015:78-80. XU Wei-dong, WANG Xiang-wei. Camouflage detection and evaluation theory and technology[M]. Beijing: National Defense University Press, 2015:78-80.(in Chinese)
[3] 李佩清, 田英, 曹嘉峰, 等. 自适应红外隐身技术研究进展[J]. 传感器与微系统, 2013, 32(10):5-8. LI Pei-qing, TIAN Ying, CAO Jia-feng, et al. Research progress of adaptive infrared stealth technology[J]. Transducer and Microsystem Technologies, 2013, 32(10):5-8.(in Chinese)
[4] Kim J, Wang X F, Wang H, et al. Fast moving object dection with non-stationary background[J]. Multimedia Tools and Applications, 2013, 67(1):311-335.
[5] Wang B, Ma Y. Moving target detection based onimproved three frame difference and background difference[J]. Computer Systems & Applications, 2015,24(8):154-158.
[6] Cucchiara R, Piccardi M, Prati A. Detecting moving object and shadows in video streams[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013,25(10):1337-1342.
[7] Senst T, Evangelio R H. Detecting people carring objects based on an optical flow motion model[J]. IEEE Computer Society,2012,23(5):301-306.
[8] Yu J, Yang J N, Liu F H. Influence factors of spatial color mixing of digital camouflage[J]. Computer & Digital Engineering,2015,49(3):494-498.
[9] Hou L, Yu J. Evaluation methods research on digital pattern painting[J]. Foreign Electronic Measurement Technology, 2013, 32(2):23-27.
[10] Ling H. How to tap in graphic design in the potential of visual[C]∥12th International Conference on Computer-aided Design and Computer Graphics. Jinan, China: IEEE, 2011.
[11] 王展,颜云辉,焦学勇.基于灰色理论的迷彩伪装多指标综合评价[J].兵工学报,2013,34(10):1250-1254. WANG Zhan, YAN Yun-hui, JIAO Xue-yong. Multi-index comprehensive evaluation of camouflage based on gray theory[J]. Acta Armamentarii, 2013,34(10):1250-1254.(in Chinese)
[12] Xu Li. Moving object detection using LAB color space[J]. Journal of Huangzhong University of Science and Technology, 2013,41(1):220-224.
[13] Pan B, Xie H M, Wang Z Y. Equivalence of digital image correlation criteria for pattern matching[J]. Applied Optics, 2012,49(28):234-238.
[14] Li J, Dang J W, Bu F. Analysis and improvement on bacterial foraging optimization algorithm[J]. Journal of Computer Science and Engineering, 2014,3(1):1-7.
[15] Cao X, Wang H, Shi Z. The research of image matching algorithm in visual inspection system[J]. Journal of Electronic Technology,2015,4(2):91-94.
[16] Sun Q, Zhou X H. Application of Matlab in camouflage effectiveness evaluation of protective construction[J]. Computer & Digital Engineering,2010,4(7):134-138.
A Surendra-based Improved Detection Method of Moving Target Camouflage Effect
YANG Jun-tang, XU Wei-dong, QU Yang, CUI Guang-zhen
(School of Field Engineering, PLA University of Science and Technology, Nanjing 210007, Jiangsu, China)
The existing camouflage detection is mainly for static targets, which can not objectively reflect the effectiveness of camouflage in combat operations of mobile equipment. The moving object detection technology and the principle of camouflage are synthetical used for target detection, and the military truck model is used as the research object. Based on Surendra background update model and Lab three-channel, a new method for detecting the camouflage effect of moving objects is proposed. According to the established experimental system, the Euclidean distance between the shape feature parameters of the military truck before and after camouflage is calculated, and the average Euclidean distance of the image sequences is 189.45. It showes that the shape feature parameters of the moving objects before and after camouflage are very different. The target after camouflage has a certain characteristics of dynamic deformation camouflage. At the same time, with the aid of the performance evaluation module, the correlation coefficient range of target image before and after camouflage is 0.003 5~0.127 5. The scientific and reliability of the detection method is proved. According to the principle of moving target detection algorithm, it can be known that the images of moving target after camouflage has a certain fusion with the images of central background.
ordnance science and technology; moving target; pattern painting camouflage; digital camouflage; effect detection
2016-03-01
国家社会科学基金军事学项目(15GJ005-002)
杨骏堂(1991—),男,硕士研究生。E-mail:yangjt12605@aliyun.com
许卫东(1966—),男,教授,博士生导师。E-mail:xweibing1968@aliyun.com
E951.4
A
1000-1093(2017)01-0190-05
10.3969/j.issn.1000-1093.2017.01.025
猜你喜欢
大自然探索(2024年1期)2024-02-29 09:10:30
新作文·小学低年级版(2022年3期)2022-08-30 07:36:46
智慧少年·故事叮当(2021年5期)2021-08-23 02:25:31
军事文摘(2020年14期)2020-12-17 06:27:24
今日农业(2019年15期)2019-01-03 12:11:33
小学生必读(低年级版)(2018年9期)2018-12-13 01:17:08
下一代英才(酷炫少年)(2018年4期)2018-04-28 08:29:50
产品可靠性报告(2017年6期)2017-09-05 10:04:17
儿童故事画报(2017年4期)2017-05-26 12:04:44
中国老区建设(2016年4期)2017-01-15 13:53:54