
利用行人运动特性的TLD快速检测算法
2017-02-15 06:05:04杨大伟吕伊鹏
大连民族大学学报 2017年1期
杨大伟,郭 超,吕伊鹏,程 凡
(大连民族大学 机电工程学院,辽宁 大连 116605)
利用行人运动特性的TLD快速检测算法
杨大伟,郭 超,吕伊鹏,程 凡
(大连民族大学 机电工程学院,辽宁 大连 116605)
针对TLD目标检测时需全局穷举搜索耗时较高的问题,提出一种基于行人运动特性的区域优化算法。该算法可有效预测行人在图像中的可能区域,从而减小检测计算复杂度,提高算法效率。经仿真分析表明,该算法在原有目标检测性能不变的情况下,检测耗时较原算法平均降低81.54 %,跟踪速率平均提升4倍,跟踪实时性明显提高。
行人检测;运动特性;TLD算法;区域优化
TLD(Tracking Learning Detection)算法是一种单目标长时性跟踪算法[1],相较于一般目标跟踪方法运行速度更快。但TLD目标检测始终进行全局搜索,大量非目标特征占用绝大多数计算时间和资源,导致算法实时性不高,也会增加相似目标的分析风险。
由于TLD利用简单的特征即可实现较好的跟踪效果,所以一直吸引着许多专家学者的关注。文献[2]在TLD的基础上加入Kalman滤波算法来预测运动目标轨迹以缩小图像检测范围,使得TLD的运算速度和适应性有所提高,但遇行人目标运动静止或转向时则极易失效。文献[3]通过在TLD算法的跟踪模块中加入粒子滤波,使得TLD在目标非线性运动或是存在较大面积遮挡的情况下跟踪鲁棒性提高,但粒子滤波跟踪算法本身计算量大,采样效率低,增加了算法的负担。文献[4]通过将TLD跟踪器的改为复杂度较高的多重实例学习算法来提高TLD的跟踪器准确性。文献[5]通过改进TLD的归一化互相关匹配算法以提高TLD的实时性。TLD算法的复杂度主要集中在检测模块[6],文献[4-5]只对跟踪器进行改进,虽然跟踪准确性提升,但实时性提升并不明显。
本文提出一种利用行人运动特性的TLD快速检测MOP算法(Motion characteristic of Pedestrian)。通过分析行人运动方式,在TLD中加入Kalman滤波算法进行目标区域预估,对检测器进行优化,从而调整TLD检测器的检测区域,使其能够快速锁定目标,有效降低原有算法的复杂度,提高实时应用能力。
1 行人运动特性算法
原TLD的目标跟踪算法并不考虑实际目标的运动规律,本文所提出的MOP算法引入基于行人行为运动特性的决策机制,极大地减小了检测框数量,改善了原有TLD算法检测环节计算量大、效率低的问题。
1.1 Kalman 滤波器数学模型
本文使用TLD跟踪目标框中心信息来初始化Kalman滤波算法,Kalman滤波器数学模型如下:
状态方程
xk=Axk-1+ωk-1,
(1)
观测方程
zk=Hxk+νk,
(2)
式中,xk为系统在k时刻的状态向量,zk为同一时刻下系统的观测向量。

1.2 行人运动特性(MOP)算法原理
MOP算法的核心是TLD加行人运动特性分析,这里行人运动具有很强的随机性,其行为受身体的生物特性以及所属物理空间惯性约束,具体表现为位移的不可突变性[7-8],且在单位时间内行人目标移动距离的分布符合距离均值μd,标准差δd的高斯分布特性。受惯性影响,目标行人可能存在区域由运动方向往非运动方向收缩。设行人加速度的最大值为A/s2(A∈[0,11],R+),采样时间t。行人在时间t内不同初速下以最大加速度改变当前运动状态的最大可能区域仿真示意图如图1。
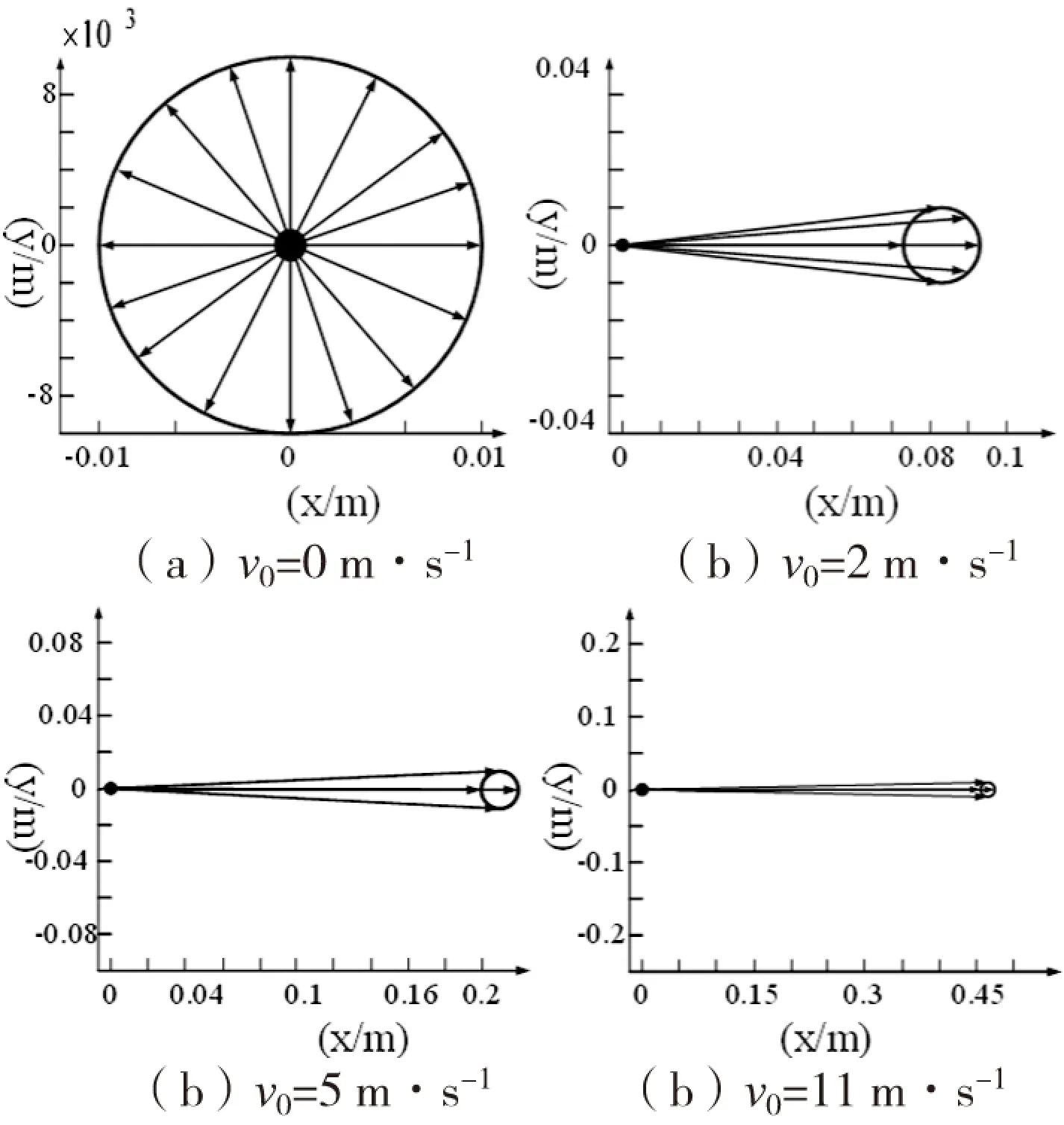
图1 行人初速度分别在0 m·s-1, 2 m·s-1, 5 m·s-1,和 11 m·s-1时中心范围示意图

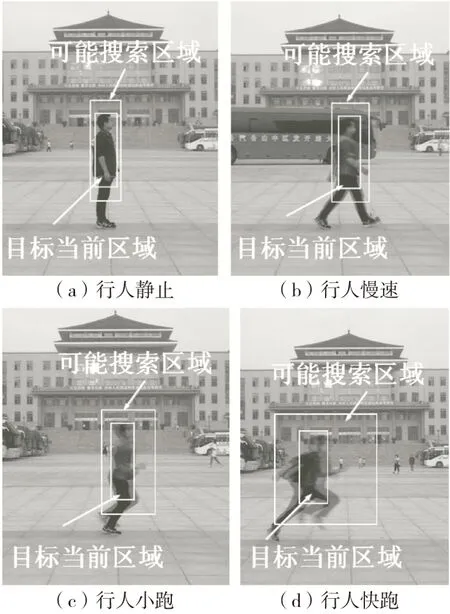
图2 实际搜索区域框示意图
1.3 算法实现
据上述算法原理,MOP算法具体实现步骤如下:
第1步,初始化TLD目标框生成正负样本并进行原TLD检测器与跟踪器的训练,初始化Kalman滤波器的xk和zk并产生下一帧的预测点pt+1。
第3步,对第2步所确定的目标区域进行检测。
第4步,结合TLD原算法的分析方法判断第3步是否找到目标,未找到进入第5步,找到进入第6步。
第6步,更新Kalman滤波器的xk和zk,将新的预测值赋予pt+1进入下一帧。
第7步,重复第2步到第6步直至跟踪结束。
2 测试结果与分析
为验证本文所提MOP算法的有效性,与原有TLD算法的仿真结果进行对比分析,以获取其性能改善效果。彷真环境为64位CENTOS6.5操作系统,硬件参数:内存4G,CPU酷睿i5,频率3.2GHz;行人最大加速度11m·s-2,采样时间1/24s下对23个行人视频进行了仿真分析。限于篇幅,本文以行人折返和变向变速作为典型场景进行分析。测试视频参数:视频格式AVI,视频帧率24,视频尺寸640×480,视频色值24bit,行人变向变速视频124帧,行人折返视频159帧。行人变向变速初始目标框大小36×124像素,行人折返初始目标框大小17×82像素,其余参数见文献[9],部分视频跟踪效果截图如图3。
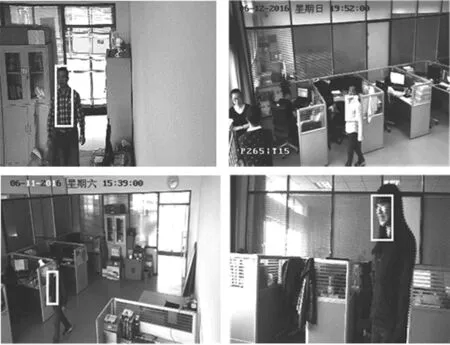
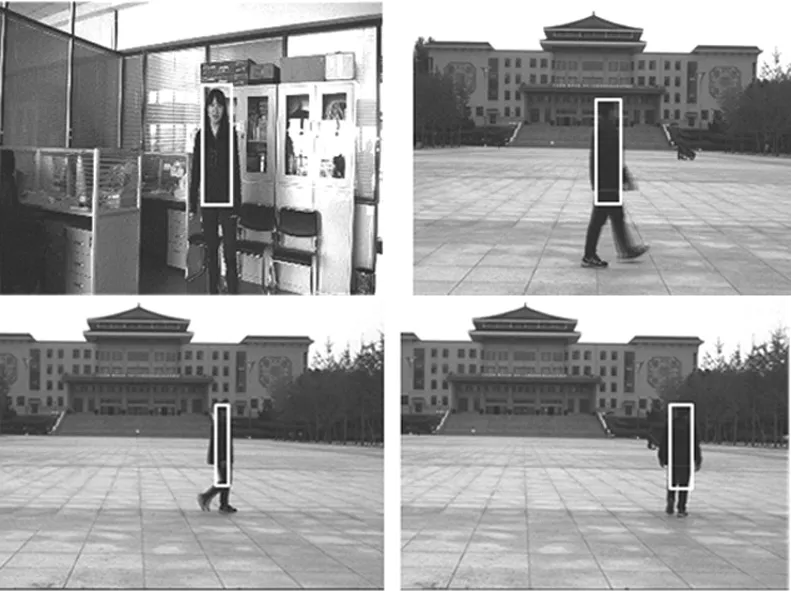
图3 MOP算法跟踪效果截图
可以看出,MOP算法适用于室内外多种不同场景,在考虑到光照变化、相似目标干扰的情形下,也能较好地实现运动目标的检测与跟踪。行人折返和变向变速场景的轨迹跟踪仿真结果如图4-5。
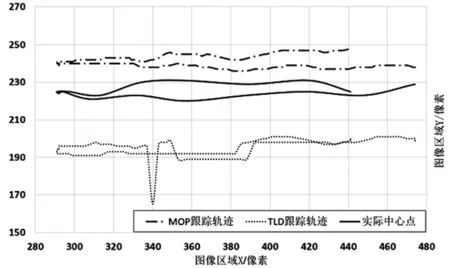
图4 折返视频MOP与TLD跟踪轨迹对比图
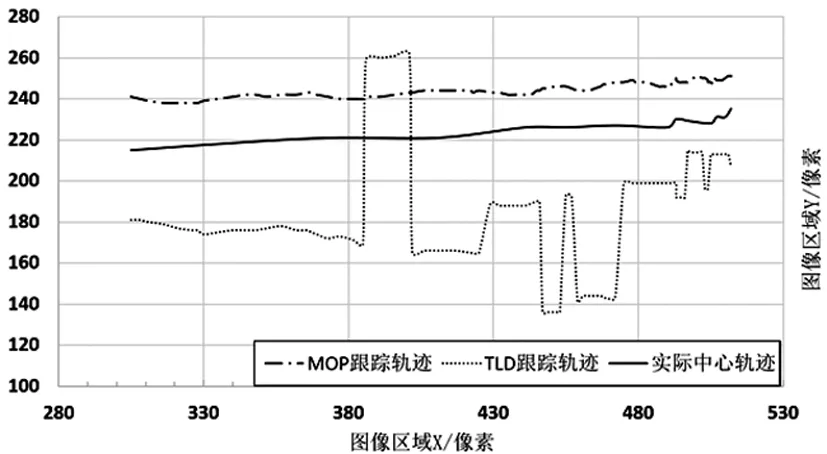
图5 变向视频MOP与TLD跟踪轨迹对比图
对比MOP算法与原有TLD算法可以看出,TLD算法在行人目标跟踪中出现目标中心点跳变的现象,这说明TLD存在相似目标干扰问题,而MOP算法因在检测时有效地限定了检测区域,从而使得跟踪轨迹呈现平滑的稳定状态,且能够显著减小检测目标中心和实际目标中心的偏差。通过仿真测试进一步证明MOP算法相较于原TLD算法,具有更高的稳定性和检测精度,其跟踪帧速率及检测用时对比结果见表1。
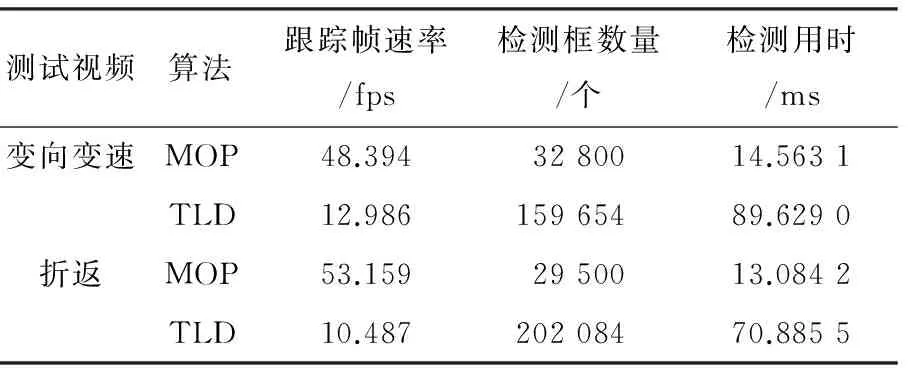
表1 典型视频跟踪结果对比
本文对包含表1在内的23个测试数据进行分析,得出跟踪准确性不变的情况下,优化的MOP算法使得原算法目标检测搜索框数量大幅降低,平均降低了79.46 %,检测耗时平均降低81.54 %,跟踪速率提升约4倍,算法的实时性明显提升。
本算法在行人目标突然加速或遮挡消失时,搜索框在原尺寸的基础上以1.2的指数倍放大,扩大到原图像尺寸大小。若在同一帧的检测中搜索框扩大次数过多或搜索框尺寸等于图像尺寸时,称此帧为失效检测帧,此时应使用原TLD检测算法进行全局搜索。
3 结 论
TLD是一种较新的高性能单目标跟踪方法,只需较少的先验信息便能实现对目标的长期在线跟踪,广泛吸引着研究者对其进行改进。现有的TLD算法改进主要从算法本身入手,专注于研究行人轮廓与颜色的特征,改进重心多为采用更为准确的行人特征表达和寻找精度更高的跟踪器,部分检测区域优化的改进方法也只是凭经验进行一个最可能的行人区域划定。本文从行人的运动特性出发,通过对行人基本尺寸及速度信息进行统计分析,得出行人在图像空间中的可能区域分布概率,引入Kalman滤波器使用其预估参数作为目标中心预判点,从理论上在保证行人目标区域全涵盖的同时使检测器运算资源得以最大化节省。该算法还根据行人目标运动的不确定性大小,对Kalman滤波器参数进行实时更新,有效避免了Kalman滤波器在目标非线性运动情况下易失效的情况。对使用该方法优化的TLD算法进行仿真测试,测试视频包括原有行人测试视频及新采集的行人目标在不同场景、光照、移动速度、局部遮挡、消失再出现、相似目标干扰等情况下的总计23个行人测试视频。测试结果为改进后的TLD目标检测框数量平均降低80 %,跟踪帧速率平均提升4倍且跟踪稳定性更好。该算法的跟踪速率可以满足移动视觉机器人在视频目标跟踪及行人运动目标跟随上的工程应用需求,并且更高的跟踪速率也意味着在交通、安保、司法取证、娱乐等领域具有更为广泛的工程应用价值。
[1]KALALZ,MKOLAJCZYKK,MATASJ.TrackingLearningDetection[J].PatternAnalysisandMachineIntelligence, 2012, 34(7):1409-1422.
[2] 周鑫, 钱秋朦, 叶永强,等. 改进后的TLD视频目标跟踪方法[J]. 中国图像图形学报, 2013, 18(9):1115-1123.
[3] 谷文华, 蒋念平, 李振兴. 基于粒子滤波的TLD目标跟踪算法[J]. 电子科技, 2015, 28(12):45-47.
[4] 高帆, 吴国平, 刑晨,等.TLD目标跟踪算法研究[J]. 电视技术, 2013, 37(11):70-74.
[5] 邢藏菊, 温兰兰, 何苏勤.TLD视频目标跟踪器快速匹配的研究[J]. 小型微型计算机系统, 2015, 36(5):1113-1116.
[6] 龚小彪. 基于TLD框架的目标跟踪算法研究[D]. 成都:西南交通大学, 2014, 6-14.
[7] 汤澄清. 步长与身高相关关系的统计研究[J]. 中国刑警学院学报, 2009(3):35-36.
[8] 马云龙, 熊辉, 蒋晓蓓,等. 行人特性对步行行为影响分析[J]. 交通与运输, 2009(1):98-101.
[9]KALALZ,MATASJ,MIKOLAJCZYKK.P-Nlearning:Bootstrappingbinaryclassifiersbystructuralconstraints[J].ComputerVisionandPatternRecognition(CVPR), 2010IEEEConferenceonSanFrancisco, 2010, 238(6):49-56.
(责任编辑 邹永红)
An Improved TLD Algorithm Based on Motion Characteristics of Pedestrian
YANG Da-wei, GUO Chao, LV Yi-peng, CHENG Fan
(School of Electromechanical Engineering, Dalian Minzu University, Dalian Liaoning 116605, China)
For the huge time-waste problem in original TLD algorithm with full-search object-detection, this paper proposes a regional optimization algorithm which is based on the motion characteristics of pedestrian. It can effectively predict the pedestrian’s position in the image so as to reduce object-detection computational complexity and improve efficiency of original TLD algorithm. Simulation analysis shows that the proposed algorithm can reduce 81.54 % detection time-cost in average and increase 4 times tracking-speed in average on the basis of the original TLD algorithm object-detection process, which obviously improved the real-time performance of object tracking compared with the original TLD algorithm.
pedestrian detection; motion characteristics of pedestrian; TLD algorithm; regional optimization
2016-10-24;最后
2016-11-16
大连金州新区科技创新主体支持计划(KJCX-ZTPY-2014-0005);中央高校基本科研业务费专项资金自主项目(DC201501089)。
杨大伟(1978-),男,黑龙江哈尔滨人,副教授,博士,主要从事机器人视觉图像处理研究。
2096-1383(2017)01-0036-04
TP242.6
A
猜你喜欢
太阳能(2022年3期)2022-03-29 05:15:50
意林(2021年5期)2021-04-18 12:21:17
太阳能(2020年3期)2020-04-08 03:27:10
电子制作(2019年11期)2019-07-04 00:34:38
当代工人·精品C(2019年2期)2019-05-10 00:13:22
扬子江(2019年1期)2019-03-08 02:52:34
电子制作(2018年16期)2018-09-26 03:26:50
计算机应用与软件(2017年7期)2017-08-12 15:45:55
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
