
离网型风力提水机智能控制系统仿真研究
2017-02-14 09:23王静文
网络安全与数据管理 2017年2期
王 伟,王静文
(鄂尔多斯应用技术学院,内蒙古 鄂尔多斯 017000)
离网型风力提水机智能控制系统仿真研究
王 伟,王静文
(鄂尔多斯应用技术学院,内蒙古 鄂尔多斯 017000)
着重研究了以无刷直流电动机(Brushless DC Motor,BLDCM)控制器为核心的小型风力提水机系统的MATLAB/Simulink仿真模型。阐述了无刷直流电动机的工作原理,对小型风力提水机控制系统进行了数学建模和仿真分析,并重点对BLDCM转速闭环系统的运行情况进行了仿真,验证了该系统可实现闭环调速,能根据风力大小自动提高出水量。
无刷直流电动机;MATLAB/Simulink仿真;转速闭环控制
0 引言
随着电力电子技术的不断发展和稀土永磁材料的广泛应用,无刷直流电动机以其高效率、高启动转矩、高功率因数等诸多优点被越来越多地应用于高性能、高可靠性场合[1]。该风力提水机系统利用了清洁能源——风能资源作为动力,驱动无刷直流电动机(BLDCM)工作,并可智能地根据风力的大小改变出水量,具有显著的环境效益、能源效益和社会效益,有较好的发展前景。
1 系统基本原理
常规离网型风力提水机系统主要由交流电源、电动机及其控制器、离心泵三部分组成,其基本结构如图1所示,其中,交流电源部分常由风力发电机构成。

图1 离网型风力提水机系统结构图
本文重点研究无刷直流电动机的运行情况。无刷直流电动机就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位置传感器三者组成的电动机系统,其原理框图如图2所示。

图2 无刷直流电动机原理图
直流电源通过开关电路向电动机定子绕组供电,转子位置传感器随时检测转子所处的位置。主控单元根据转子位置传感器检测的转子位置反馈信号产生换相逻辑,并将其与PWM信号进行逻辑综合构成控制信号。该控制信号经驱动电路放大后送至逆变器各功率开关管的栅极,用于控制与定子连接的功率开关管的导通和关断,从而控制电动机各相绕组按一定顺序分别导通工作,如此循环工作,电动机在顺序磁拉力的作用下按照一定方向转动。
2 系统建模
采用MATLAB软件中的Simulink工具箱进行仿真,该软件是MathWorks公司开发的一个著名动态仿真系统,可以模拟线性与非线性、连续与非连续系统或它们的混合系统,并能够方便地修改仿真参数[2]。
该仿真系统由交流电源、整流器、逆变器、无刷直流电动机本体、换向逻辑、控制器、负载转矩组成。其中负载是离心泵负载,其负载转矩与转速的二次方成正比,通过选择一个合适的比例系数即可实现电机的稳态运行,本系统中该参数选择为TL=0.000 005 2n2,小型风力提水机控制系统的仿真结构如图3所示。

图3 小型风力提水机控制系统仿真图
2.1 电机本体数学模型
基于“两相导通星形联接三相六状态”无刷直流电动机的主要特点,为简化分析,通常在仿真建模中假定[2]:
(1)气隙磁场为方波,三相绕组和磁场分布对称;
(2)忽略齿槽、换相过程和电枢反应等影响;
(3)绕组在定子内表面均匀连续分布;
(4)磁路不饱和,不计涡流和磁滞损耗。
在这些假定条件下,可得到“两相导通星形联接三相六状态”无刷直流电动机数学模型。
电压方程为:
每次训练只集中培训一项临床操作技能,便于医学生掌握;微格教学的教案要求说明所训练临床操作技能的目标,并要求详细说明操作过程中哪些行为是该项操作技能评价的要素。
(1)
式中,ua、ub、uc分别为三相绕组相电压;ea、eb、ec为三相绕组的反电动势;R为定子每相绕组的电阻;ia、ib、ic为定子三相绕组相电流;L为每相绕组的自感;M为每两相绕组间的互感。
电磁转矩数学方程为:
(2)
式中,ea、eb、ec为三相绕组的反电动势;ia、ib、ic为三相绕组相电流。
转子运动方程为:
(3)
式中,Te为电磁转矩,TL为负载转矩,J为转子与负载的转动惯量。
根据以上得到的数学模型可以建立BLDCM的电机本体,其中反电势模块用查表法实现[3]。
2.2 逆变器模型
无刷直流电动机的逆变器是三相全桥结构,主要由6个功率三极管和6个续流二极管组成,其仿真模型如图4所示。

图4 逆变器的仿真模型
其工作方式为两相导通模式,即每一瞬间有两个功率管导通,每隔1/6周期(60°电角度)换相一次。电机正转时各功率管的导通顺序为:VT6、VT1→VT1、VT2→VT2、VT3→VT3、VT4→VT4、VT5→VT5、VT6→VT6、VT1,开关管的导通信号是由主控芯片根据转子位置传感信号产生的换相逻辑决定。
2.3 换相逻辑和控制信号模型
BLDCM绕组换相通过检测转子位置实现[4]。各功率开关管的控制信号是转子位置的函数,利用查表方法根据转子位置信号可以方便地生成各功率开关的换相逻辑信号。
仿真中,PWM信号是由反馈电流信号生成三角波信号、转速PI控制输出作为直流给定信号,二者叠加后经一个滞环环节便得到等幅、等宽、等距的PWM波。
将换相逻辑信号和PWM信号进行逻辑与操作之后可以得到各开关管的控制信号,图5所示的是VT1~VT6各功率开关管的控制信号。

图5 各开关管的控制信号
2.4 整流器模型
整流器用于将交流电变换为BLDCM所需的直流电,图6所示的是三相桥氏整流0°导通状态电路,其中,三相桥是由SimPowerSystems中的Universal Bridge构成的,触发信号G由同步6脉冲发生器提供[5]。
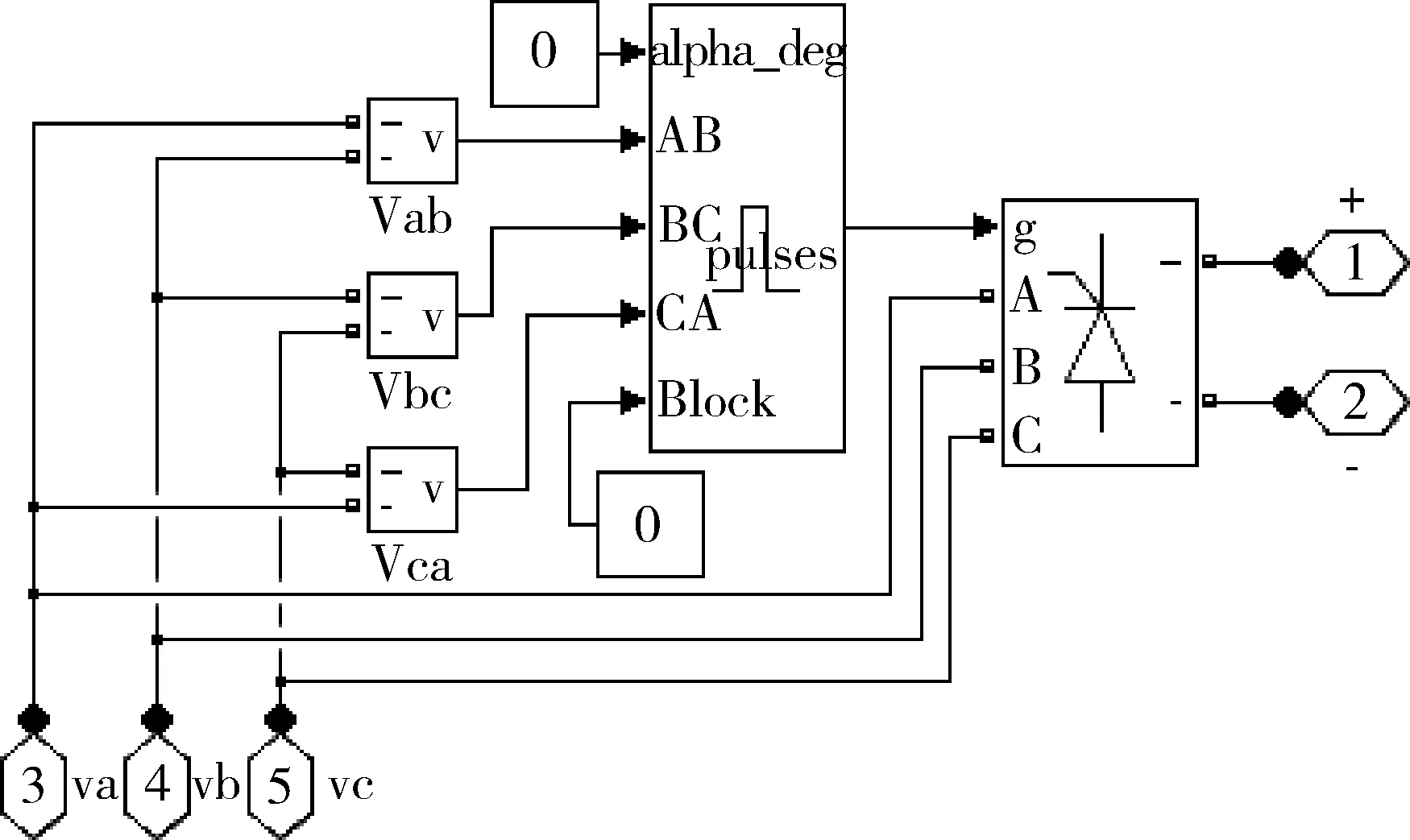
图6 三相桥氏整流电路
设置交流电源和同步脉冲的频率为50 Hz,6脉冲发生器的触发角为0°。输出端并联大电容以稳定输出电压,并将其加至逆变器两端。
3 仿真与分析
设置仿真参数如下:
极对数p=2,每相电枢绕组电阻R=2 Ω,自感L=4.2 mH,互感M=0.2 mH,反电动势系数ke=0.635 V·rad/s,转子转动惯量J=2×10-3N·m·s2,仿真时间为0.2 s,仿真采样步长为1×10-6s。
系统的交流输入电压有效值为U1,给定转速为n,系统的最大输入电压为120 V,额定输入电压为85.5 V,自动停机电压为25 V。
对系统进行仿真,分别观测输入电压为120 V、85.5 V、25 V时整流器输出电压Ud、A相电枢电流ia、A相反电动势ea、转速n和电磁转矩Te波形,仿真结果如图7~图10所示。

图7 U1=120 V、n=1 200 r/min时仿真波形
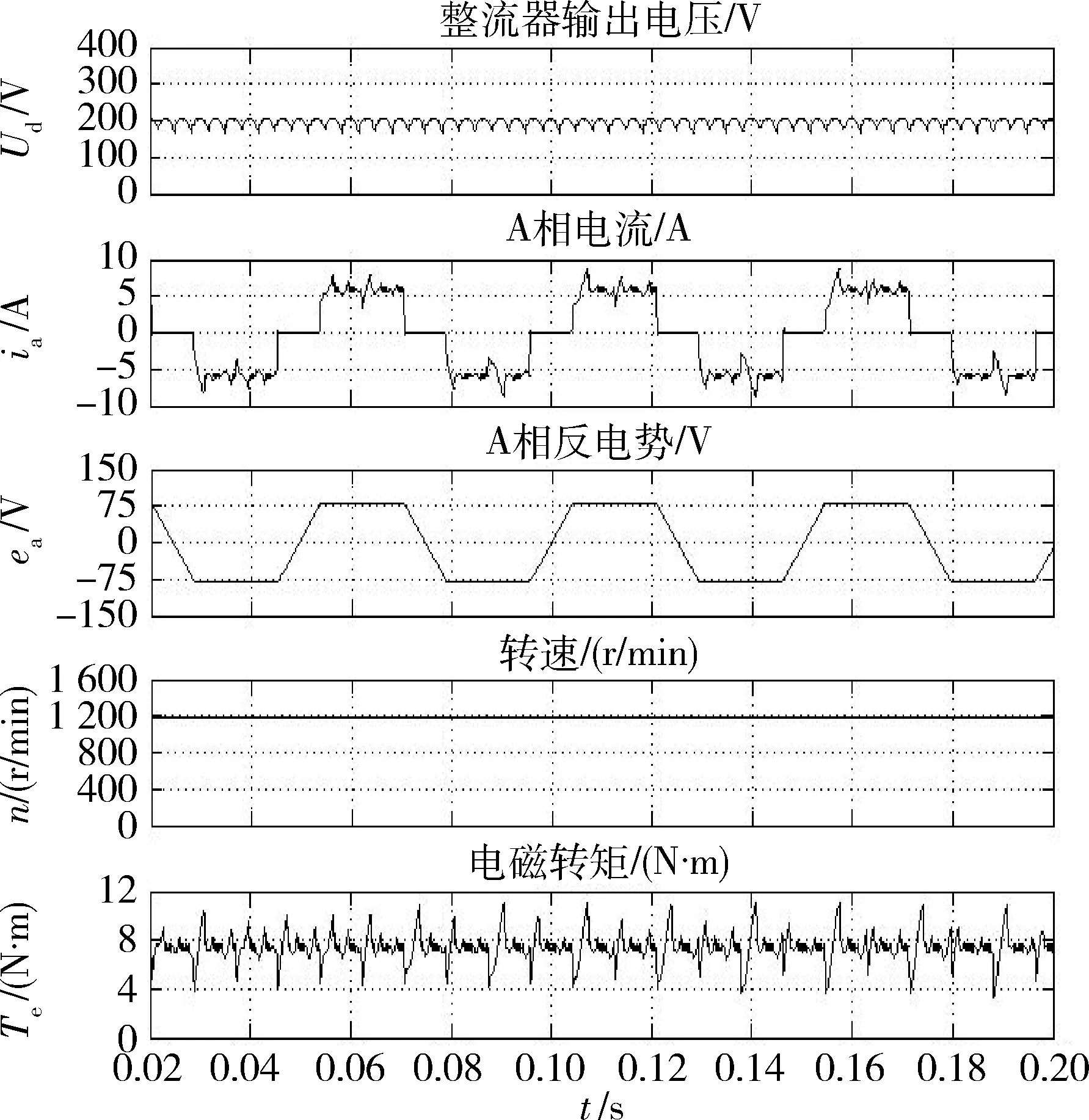
图8 U1=85.5 V、n=1 200 r/min时仿真波形
由图7、图8看出,给定转速为1 200 r/min,输入电压为最大电压和额定电压时,电机转速都保持在1 200 r/min,电机电磁转矩、电流等参数正常,系统运行性能良好。
由图8、图9看出,额定电压下,电机的实际转速始终跟踪给定转速,电机电磁转矩等参数也随给定转速的变化而变化,系统出水量可调节。

图9 U1=85.5 V、n=1 000 r/min时仿真波形

图10 U1=25 V、n=1 200 r/min时仿真波形
根据仿真波形图7~图10还可以得到,由三相桥氏整流电路可得到U0≈2.34U1,在给定转速下,系统响应快速平稳,转速、电磁转矩、相电流和相反电势很快达到稳态,电磁转矩脉动很小,各波形与无刷直流电动机的理论分析相吻合。
综合仿真结果,BLDCM可根据输入电压大小自动提高转速,从而使小型风力提水机系统可智能地根据风力大小提高出水量。当风力充裕时,系统闭环运行,需水量大时,使BLDCM工作在额定转速,需水量小时,可以通过手动给定转速,让电机以额定转速下的给定转速工作,以满足水量要求;当风力不足使得加在BLDCM定子端电压不高从而使转速较低时,电机的运行状况较差。
4 结论
本文根据无刷直流电动机的数学模型,提出了速度和电流双闭环控制方案。利用MATLAB/Simulink建立了BLDCM控制系统的仿真模型,对系统整体模型进行了仿真,验证了所得波形与理论波形相吻合,从而验证了系统的可行性。通过分析不同输入电压、不同给定转速下电机的运行情况,得出该系统可以根据输入电压大小自动提高转速,并在一定范围内实现转速闭环控制。
[1] 夏长亮. 直流无刷电机控制系统[M ]. 北京:科学出版社,2009.
[2] 王立,刘景林. 无刷直流电动机驱动系统建模及故障分析[J]. 测控技术,2010,29(12):35-39.
[3] 杨乐梅.基于Matlab无刷直流电动机的控制系统建模仿真的新方法[J]. 青岛大学学报,2008, 23(4):61-65.
[4] 叶振锋,雷淮刚.基于Matlab的无刷直流电动机控制系统仿真[J] .微特电机,2006,12(3):22-26.
[5] 姚俊,马松辉.Simulink建模与仿真[M].西安:西安电子科技大学出版,2002.
The simulation research on the isolated intelligent system of wind supplied water pumping machine
Wang Wei, Wang Jingwen
(Ordos Institute of Technology, Ordos 017000, China)
This paper studies the MATLAB/Simulink simulation mode of the system of water pumping machine supplied by wind, especially its core, the Brushless DC Motor (BLDCM) controller. A mathematical model is founded and simulation is done by using MATLAB after explaining the working principle of BLDCM system. The closed-loop operation situation of the whole system has been observed through MATLAB simulation. Thus, it can realize closed-loop speed control and pumping water automatically according to the strength of wind.
BLDCM;MATLAB/Simulink simulation;closed-loop speed control
TM381
A
10.19358/j.issn.1674- 7720.2017.02.023
王伟,王静文.离网型风力提水机智能控制系统仿真研究[J].微型机与应用,2017,36(2):74-77.
2016-08-27)
王 伟(1989-),通信作者,男,硕士,讲师,主要研究方向:电源变换和电机控制技术。E-mail:ww9271@163.com。
王静文(1991-),女,硕士,讲师,主要研究方向:信号采集与检测。
猜你喜欢
防爆电机(2022年1期)2022-02-16
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
应用能源技术(2019年1期)2019-01-30
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
照明工程学报(2016年3期)2016-06-01
