
内置式永磁同步电机转子初始位置检测方法
2017-02-11 01:33:22刘庆飞
电源学报 2017年1期
刘庆飞
(天津大学电气与自动化工程学院,天津300072)
内置式永磁同步电机转子初始位置检测方法
刘庆飞
(天津大学电气与自动化工程学院,天津300072)
针对无位置传感器内置式永磁同步电机的转子初始位置检测问题,提出一种基于旋转高频电压注入法和恒定磁场定位法的永磁同步电机转子初始位置检测方法。基于凸极跟踪的原理,通过注入旋转高频电压信号的方法获得估计转子位置,在此基础上,采用恒定磁场定位法对估计转子位置的磁极极性进行判断,实现对估计转子位置的极性校正,并且补偿估计转子位置的偏移误差,从而得到转子初始位置。在实验平台上进行了实验验证,实验结果表明文中提出的方法能够快速且准确地检测出转子初始位置,实现永磁同步电机无位置传感器可靠起动。
内置式永磁同步电机;旋转高频电压信号注入;恒定磁场定位法;转子初始位置
在高性能内置式永磁同步电机IPMSM(interior permanent magnet synchronous motor)无位置传感器矢量控制系统[1]中,电机产生启动转矩的大小取决于转子初始位置角的准确程度[2],而启动转矩的方向取决于初始位置的磁极极性,当初始位置在N极时,电机可以正常启动;当初始位置为S极时,将会引起磁场定向控制发生失调,导致启动失败。因此,对转子初始估计位置进行磁极极性判别是保证电机正常起动的关键环节,是实现电机无位置传感器控制的基础。
在静止和低速状态下主要利用永磁同步电机转子固有的空间凸极或激励的凸极效应获取转子位置信息,其中最常用的是高频信号注入法[3-5],但是由于转子的凸极具有对称性,高频信号注入法获取的转子估计位置可能位于N极,也可能位于S极,因此还需要判断转子估计位置的磁极极性。
近年来,国内外学者围绕转子磁极极性判别问题进行了广泛的研究,提出了许多方法,其中利用电机绕组磁路的饱和效应判别转子的磁极极性是重点研究方向[6-10]。文献[6]提出一种利用系统逆变器本身的载波频率成份信号判别转子磁极极性的方法,但在实际应用中,该方法限定了脉冲调制PWM(pulse width modulation)逆变器的调制方式,导致无法应用矢量控制方法,降低了系统的动态性能;文献[7]采用高频信号注入法,利用高频响应电流信号的二阶泰勒级数的系数判断初始估计位置的磁极极性,但是由于二次高频电流信号的信噪比低,且算法复杂,不适合实际应用;文献[8-10]在初始估计转子位置的正、反两个方向注入脉冲电压矢量,通过比较d轴电流幅值的大小来判断磁极极性,这种方法涉及注入脉冲电压的幅值、作用时间等选择问题,而且要求传感器精度足够高,显然这种方法增加了实现难度。因此,有必要研究一种简单、实用的IPMSM转子磁极极性判断方法。
此外,信号处理过程中使用的滤波器不可避免地导致信号延时作用[11],而且各种复杂的非理想因素,如电机转子中存在的附加凸极、磁路饱和、逆变器的死区效应等都会导致位置估计出现偏差[12-13],而且一般来讲转子的磁极位置和凸极位置并不严格地重合在一起,若不进行必要的修正将给电机的驱动性能带来损失。
针对上述问题,本文研究了一种利用旋转高频电压注入法和恒定磁场定位法相结合的转子初始位置检测方法。首先通过注入旋转高频电压获得估计转子位置,然后利用恒定磁场定位的方法判别估计转子位置的磁极极性,并补偿估计位置的偏差,从而得到转子初始位置,实现永磁同步电机无位置传感器起动控制。最后通过一内置式永磁同步电机验证了本文提出方法的有效性和实用性,实现了电机的可靠起动。
1 IPMSM转子位置估计方法
IPMSM的转子结构具有凸极特性,基于转子凸极跟踪的原理,采用旋转高频电压注入法对转子位置进行观测。取转子永磁体定向于d轴,在d-q两相旋转坐标系下,IPMSM的电压方程为

式中:ud、uq、id、iq为两相旋转坐标系下的定子电压和电流分量;Rs为定子电阻;Ld、Lq分别为定子绕组的d、q轴电感;ωr为转子电角速度;ψf为转子永磁体磁链;p为微分算子。
将式(1)变换到两相静止坐标系下,可得

设在α-β两相静止坐标系下注入的高频电压信号为

式中,uαi、uβi为静止坐标系下的高频电压。
当在电机中注入的高频电压频率远大于电机的供电基频频率,即ωi>>ωr时,可以忽略定子电阻压降和反电动势。则IPMSM在两相静止坐标系中的高频电压方程为
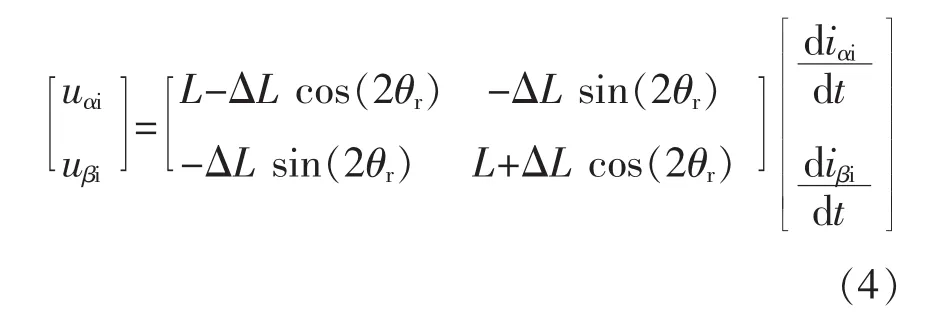
式中:uαi、uβi、iαi、iβi为静止坐标轴系下高频电流分量;下标“i”表示高频分量。
由式(3)和式(4)可得高频电流的稳态响应为


由式(5)可以看出,高频电压激励出的高频电流中包含正序电流分量和负序电流分量,而只有负序电流分量中含有转子位置信息,须采用合适的信号处理方式提取负序高频电流分量,实现转子位置的观测。
为了提取高频响应电流中的负序电流,必须很好地滤除电机定子电流中的低频谐波电流、基频电流、PWM开关谐波电流和高频正序电流。首先通过带通滤波器[4]BPF(band-pass filter)滤除基频电流、低频谐波电流和PWM谐波电流,得到高频响应电流iαi和iβi;然后使用同步轴高通滤波器[5]SFF滤除高频正序电流,得到含有转子位置信息的负序电流iαni和 iβni[7],最后利用软件锁相环[2]PLL(phase locked loop)来观测转子位置和速度。基于软件锁相环的转子位置观测器如图1所示。
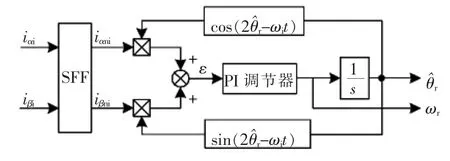
图1 基于软件锁相环的转子位置观测器Fig.1 Rotor position observer based on phase-locked loop
通过外差算法得到转子位置误差信号为

经过锁相环中的PI调解器[14]使ε趋于0,当锁相环进入相位“锁定”时,估计转子位置收敛于实际转子位置θr,同时可以得到估计转速。
2 估计转子位置磁极极性判断方法
本文采用恒定磁场定位的方法判断估计转子位置的磁极极性,并且自动补偿偏移误差。不失一般性,以一对极转子结构为例进行原理说明。估计转子位置磁极极性检测原理如图2所示。
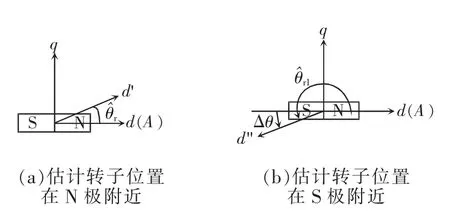
图2 估计转子位置磁极极性检测原理Fig.2 Schematic diagram of estimated rotor position polarity identification
基本原理如下:电机在空载或轻载时,认为给电机定子绕组通以一个足够大的正向d轴电流,可以使电机转子永磁体的N极和定子A相绕组的轴线同方向。
在图2中,转子永磁体被吸合到与A相绕组重合的方向,d表示实际转子位置,d'和d"表示估计转子位置,通过高频注入法获得的估计转子位置为。若0≤≤0.5π或1.5π≤≤2π,则估计的转子位置在N极附近,如图2(a)所示,有Δθ=2π-,此时估计转子位置不需要极性修正,只需补偿偏差。若0.5π<≤π或π≤<1.5π,则估计的转子位置在S极附近,如图2(b)所示,此时估计转子位置首先需修正到N极,即-π,然后求得补偿偏差,即Δθ=π-。
转子磁极极性判断及误差补偿框图如图3所示,具体实现方式为:①在电机矢量控制中,断开速度环,给定=i(恒定直流)、=0,矢量变换角θ=0;nr②电机转子被吸死后,通过高频注入法获得的转子位置估计值为,根据上述方法计算Δθ;③按照上述方法对进行极性校正和误差补偿,得到转子初始位置,与向转子永磁体N极同方向。

图3 转子磁极极性判断及误差补偿框图Fig.3 Block diagram of rotor polarity identification and error compensation
3 实验结果与分析
为了验证本文提出方法的有效性,在空载条件下,在如图4所示的IPMSM无位置传感器控制实验平台上进行了实验验证。控制器采用TI公司的TMS320LF2407A作为主控芯片,电机由MOS开关管构成的电压源型三相逆变器供电,PWM开关频率为16 kHz,注入高频电压的幅值为30 V、频率为400 Hz。电机轴端装有HAD-CXB/4096型绝对式磁电编码器,用来检测转子磁极实际位置,绝对编码器只用作实验对比。

图4 IPMSM无位置传感器控制实验平台Fig.4 Experimental platform of IPMSM sensorless control
实验所用永磁同步电机参数为:额定功率0.07 kW,额定转矩3.7 N·m,额定电压140 V,额定电流0.5 A,额定频率12 Hz,额定转速180 r/min,极对数4,定子电阻Rs=8.9 Ω,直轴电感Ld=0.123 H,交轴电感Lq=0.218 H。实验结果如下,实验波形均是通过横河DL1640L型示波器获得。

图5 估计转子位置磁极极性判别实验波形Fig.5 Experimental waveforms of estimated rotor position magnet polarity detection
图5为空载条件下,估计转子位置磁极极性判别实验波形,图5(a)为估计转子位置为N极的实验波形,图5(b)为估计转子位置为S极的实验波形。图中波形分别为:估计转子位置θr、实际转子位置θr及高频响应电流iαi和iβi。对比转子位置和高频电流波形可以清楚地看出高频电流信号中含有转子位置信息。在图5(a)中可以清楚地看出,估计转子位置在N极附近,此时不需要极性校正,但是需要补偿偏移误差Δθ,经过误差补偿后,估计转子位置可以很好的跟踪实际转子位置。分析图5(b)可知,此时估计转子位置在S极附近,经过极性校正和误差补偿,估计转子位置可以很好地跟踪实际转子位置,误差很小,说明本文提出的方法在起动初始阶段可以获取永磁同步电机的转子初始位置,与理论分析相符。
图6给出了空载条件下一个电角度周期内18个不同位置的转子初始位置检测结果,图中把估计转子位置和实际转子位置θr进行了对比。分析实验结果可以看出,估计转子位置非常接近实际转子位置,最大估计误差约为5°电角度,平均估计误差约为1.5°,估计效果较好。说明本文提出的方法能够实现转子初始位置的检测,并且在上述误差范围内可以产生足够的起动转矩,满足电机的起动要求。

图6 估计转子位置和实际转子位置对比Fig.6 Experimental comparison results of estimated and actual rotor position
图7为空载条件下,电机给定转速为60 r/min、无位置传感器的起动运行实验波形,其中图7(a)给出了估计转子位置在N极附近,电机起动运行实验结果,图7(b)给出了估计转子位置在S极附近,电机起动运行实验结果,图中波形分别为:估计转子位置和实际转子位置θr、估计转速和实际转速ωr。分析实验结果可知,在以上两种情况中,估计转子位置可以很好地跟踪实际转子位置且误差很小。电机以无位置传感器方式起动后,估计转速较好地跟踪实际转速,且很快地进入稳定运行状态,说明采用本文提出的策略可以实现电机无位置传感器平稳起动。

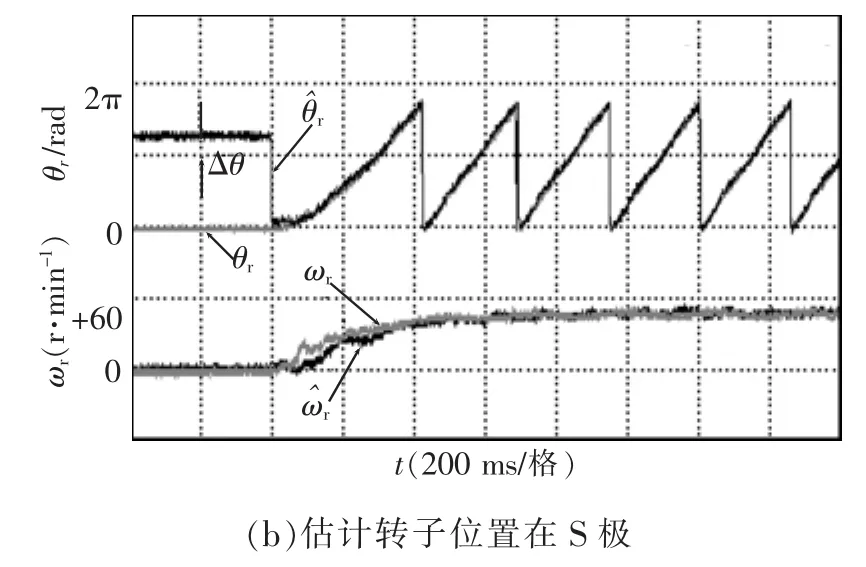
图7 电机转速60 r/min、无位置传感器起动的实验波形Fig.7 Waveforms of sensorless starting operation with 60 r/min
4 结语
本文提出了一种基于旋转高频电压注入法与恒定磁场定位法相结合的内置式永磁同步电机转子初始位置检测方法,采用注入旋转高频电压信号的方法,通过锁相环转子位置观测器获得估计转子位置;在此基础上,提出的基于恒定磁场定位的转子磁极极性判别方法能够较准确地判断估计转子位置的磁极极性并补偿偏差,进而获取转子初始位置,实现了电机无位置传感器闭环平稳启动。虽然在估计转子位置磁极极性判断过程中存在转子转动现象,但是算法简单、辨识精度高。实验结果证明本文提出的方法简单有效,具有一定的工程应用价值。
[1]尹忠刚,张瑞峰,曹钰,等.基于扩展卡尔曼滤波器的永磁同步电机转速估计方法研究[J].电源学报,2013,11(2):74-77,83. Yin Zhonggang,Zhang Ruifeng,Cao Yu,et al.Speed estimation method of permanent magnet synchronous motor based on extended kalman filter[J].Journal of Power Supply,2013,11(2):74-77,83(in Chinese).
[2]王高林,杨荣峰,李刚,等.基于高频注入的IPMSM无位置传感器控制策略[J].电工技术学报,2012,27(11): 62-68. Wang Gaolin,Yang Rongfeng,Li gang,et al.Position sensorless control strategy of IPMSM based on high frequency signal injection[J].Transactions of China Electrotechnical Society,2012,27(11):62-68(in Chinese).
[3]万山明,吴芳,黄声华.基于高频电压信号注入的永磁同步电机转子初始位置估计[J].中国电机工程学报,2008, 28(33):82-86. Wan Shanming,Wu Fang,Huang Shenghua.Initial Rotor position estamation of permanent magnet synchronous motor based on high frequency voltage signal injection method[J].Proceedings of the CSEE,2008,28(33):82-86(in Chinese).
[4]刘毅,贺益康,秦峰,等.基于转子凸极跟踪的无位置传感器永磁同步电机矢量控制研究[J].中国电机工程学报, 2005,25(17):121-126. Liu Yi,He Yikang,Qin Feng,et al.Investigation of rotor saliency-tracking based sensorless vector control drive for PMSM[J].Proceedings of the CSEE,2005,25(17):121-126(in Chinese).
[5]Degner M W,Lorenz R D.Using multiple saliencies for the estimation of flux,position,and velocity in AC machines[J]. IEEE Transactions on Industry Applications,1998,34(5): 1097-1104.
[6]于艳君,高宏伟,柴凤,等.永磁同步电机转子磁极的极性判别方法[J].电机与控制学报,2011,15(3):86-90. Yu Yanjun,Gao Hongwei,Chai Feng,et al.Rotor magnetic polarity detection method for PMSM[J].Electric Machines and Control,2011,15(3):86-90(in Chinese).
[7]Raca D,Harke M C,Lorenz R D.Robust magnet polarity estimation for initialization of PM synchronous machines with near-zero saliency[J].IEEE Transactions on Industry Applications,2008,44(4):1199-1209.
[8]王高林,杨荣峰,于泳,等.内置式永磁同步电机转子初始位置估计方法[J].电机与控制学报,2010,14(6):56-60. Wang Gaolin,Yang Rongfeng,Yu Yong,et al.Initial rotor position estimation of interior permanent magnet synchronous motor[J].Electric MAchines and Control,2010, 14(6):56-60(in Chinese).
[9]Holtz J.Acquisition of position error and magnet polarity for sensorless control of PM synchronous machines[J]. IEEE Transactions on Industry Applications,2008,44(4): 1172-1180.
[10]何栋伟,彭侠夫,蒋学程,等.内置式永磁同步电机转子初始位置估计方法[J].电机与控制学报,2013,17(3): 49-55. He Dongwei,Peng Xiafu,Jiang Xuecheng,et al.Initial rotor position estimation method for IPMSM[J].Electric Machines and Control,2013,17(3):49-55(in Chinese).
[11]Raca D,Lorenz R D.Carrier-signal selection for sensorless control of PM synchronous machine at zero and very low speeds[J].IEEE Transactions on Industry Applications,2010,46(1):167-178.
[12]Park Y,Sul S K,Ji J K,et al.Analysis of estimation errors in rotor position for a sensorless control system using a PMSM[J].Journal of Power Electronics,2012,12(5): 748-757.
[13]Jeong Y S,Lorenz R D,Sul S K,et al.Initial rotor position estimation of an interior per manent-magnet synchronous machine using carrier-frequency injection methods[J].IEEE Transactions on Industry Applications,2005, 41(1):38-45.
[14]Wang Yifei,Li Yunwei.Analysis and digital implementation of cascaded delayed-signal-cancellation PLL[J].IEEE Transactions on Power Electronics,2011,26(4):1067-1080.
Initial Rotor Position Estimation Method for Interior Permanent Magnet Synchronous Motor
LIU Qingfei
(School of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China)
In order to achieve the estimation of the initial rotor position for a position sensorless interior permanent magnet synchronous motor,a hybrid method based on rotating high frequency voltage signal injection together with a constant magnetic field method is proposed.First of all,an estimated rotor position is obtained by injecting high frequency voltage signal into stator winding.On this basis,a constant magnetic field method is used to identify the magnet polarity of the estimated rotor position.What’s more,it compensates the estimated error automatically.Then the initial rotor position can be obtained.In the end,the verification experiments were implemented on the experimental platform.The experimental results show that the proposed approach can identify the magnet polarity of the initial rotor position accurately and start up the permanent magnet synchronous motor successfully and reliably.
interior permanent magnet synchronous motor;rotating high frequency voltage signal injection;constant magnetic field method;initial rotor position
刘庆飞(1989—),男,通信作者,硕士研究生,研究方向:永磁同步电机控制技术,E-mail:LQF539@126.com。

刘庆飞
10.13234/j.issn.2095-2805.2017.1.132
:TM 351
:A
2015-11-26
猜你喜欢
防爆电机(2022年4期)2022-08-17 05:59:12
防爆电机(2021年4期)2021-07-28 07:42:54
大电机技术(2021年2期)2021-07-21 07:28:34
电动工具(2020年6期)2020-12-29 05:53:36
防爆电机(2020年6期)2020-12-14 07:16:54
时代英语·高一(2019年5期)2019-09-03 02:09:34
光学精密工程(2016年3期)2016-11-07 09:03:49
电测与仪表(2016年11期)2016-04-11 12:20:42
电源技术(2015年5期)2015-08-22 11:18:28
大电机技术(2015年5期)2015-02-27 08:22:28
