电动直驱式超高压力液压系统动力机构特性分析
2017-02-10 09:44:20杜治江沈佳丽
中国机械工程 2017年2期
许 宏 杜治江 沈佳丽 王 凌
中国计量大学机械工程学院,杭州,310018
电动直驱式超高压力液压系统动力机构特性分析
许 宏 杜治江 沈佳丽 王 凌
中国计量大学机械工程学院,杭州,310018
提出一种适用于金刚石等超硬材料生产过程压机保压阶段的电动直驱式超高压力控制方式。该方式可实现精确的压力补偿,为人造金刚石晶体生长提供高精度的平稳压力,提高金刚石的品质等级。介绍了电动直驱式超高压力控制系统的工作原理,建立了相应的伺服动力机构的数学模型,并对动力机构的主要参数和系统开环频率特性进行了分析,指出了液压缸有效面积、压力腔有效体积以及负载弹性刚度等主要参数对系统特性影响的变化趋势。
超高压;电动直驱;压力控制;动力机构
0 引言
人造金刚石和立方氮化硼等超硬材料的使用已经越来越广泛,高强度、高品质、大颗粒的金刚石的需求量急剧增长。人造金刚石是在高温超高压((1350±50)℃,(5.4±0.2)GPa)环境下合成的[1],压力-温度脊线对应的温压条件最有利于金刚石晶体生长,品质也对应最好。
无论是我国的人造金刚石的六面顶压机,还是国外的两面顶压机,其液压系统采用的都是基于密封、节流控制和容积式泵的常规液压系统[1-3],压力逐级放大,最终得到顶锤端部的超高压力输出。这样的液压系统要获得更高的压力控制精度是非常困难的,造成常规的液压系统控制精度不高的主要原因是:①液压泵的柱塞和叶片的个数有限造成瞬态流量脉动;②内外泄漏后的补油造成压力波动。压力的脉动和波动经压机主油缸的压力放大后将对系统特性造成非常严重的影响。
笔者提出的电动直驱式压机超高压力控制方式,可产生高精度的压力条件,为此建立了相应的伺服动力机构的数学模型,并进行相关的理论分析。
1 电动直驱式超高压力控制系统原理
电动直驱式液压力控制系统采用交流伺服电机直接驱动液压系统,是一种无阀、无泵的电液伺服控制系统,其结构、压力控制系统分别如图1、图2所示。
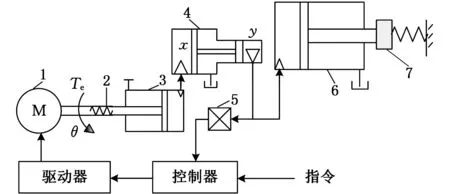
1.交流伺服电机 2.滚珠丝杠 3.液压缸 4.增压缸 5.液压变送器 6.压机主油缸 7.负载图1 直驱式超高压力控制系统结构示意图Fig.1 Schematic diagram of direct drive ultrahigh pressure control system
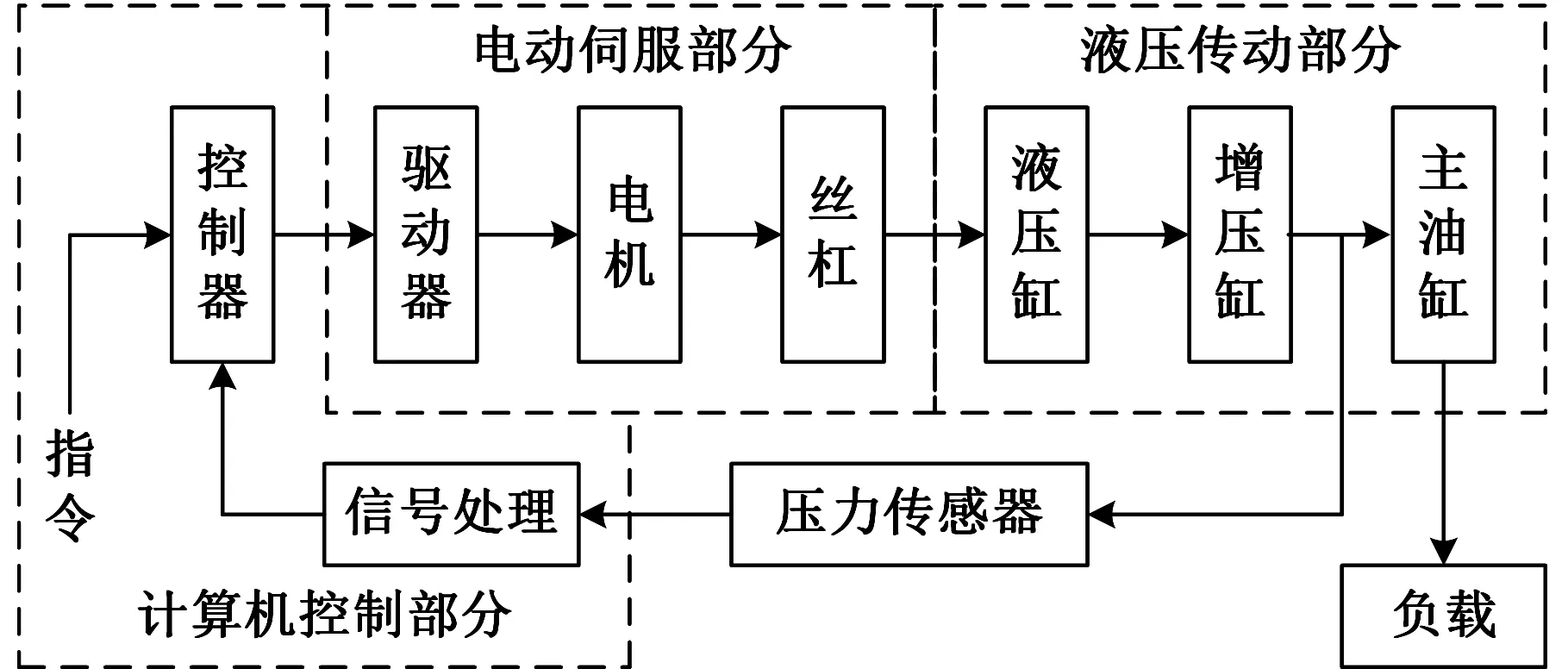
图2 直驱式液压压力控制系统框图Fig.2 Block diagram of direct drive hydraulic pressure control system
伺服电机输出的转角经过丝杠转换成直线位移,直接推动液压缸产生高压。增压后得到的超高压力提供给主油缸。经过主油缸顶锤本身的放大作用,力放大倍数可达50左右,最后在合成腔内生成的压力可达到5.4 GPa[1],满足金刚石合成所必须的超高压力条件。
此系统采用伺服电机+丝杠的直接电驱动的液压系统来实现压力的控制,系统压力控制过程从原理上消除了传统液压控制系统中出现的压力脉动,能减小受控压力的波动。
2 动力机构的数学模型
由图1可知,整个电动直驱超高压力控制系统依靠电机做功直接驱动液压机构。交流伺服电机运行可靠,有较高的输出功率以及良好的动态响应,可作为系统的动力源。由图2可知,整个超高压力控制系统由控制器、压力反馈、电动伺服部分、液压传动部分和负载组成。
2.1 电动伺服部分的数学模型
交流伺服系统[4-7]的频带比整个伺服控制系统的频带要宽很多,可简化为二阶惯性环节:
(1)
式中,Kt为交流伺服系统的转矩增益;Td为伺服电机的电气时间常数;Tm为伺服电机的机电时间常数。
丝杠将旋转位移转换为直线位移[8],输出轴向力可近似为一个比例环节:
G2(s)=Ks=Ft(s)/T(s)=2πη/l
(2)
式中,l为丝杠的导程;η为传动效率。
2.2 液压动力部分和液压变送器的数学模型
如图3所示,液压缸被丝杠推动产生液压高压。电机带动丝杠输出的位移为x1,丝杠作用在液压缸活塞上的作用力为Ft,液压缸低压腔压力为p0,液压缸高压腔压力为p1。设液压缸的活塞有效面积为A1,折合到活塞上的质量为mt,Bp为活塞和液体缸体的黏性摩擦阻尼系数,对上述过程可以建立以下方程。
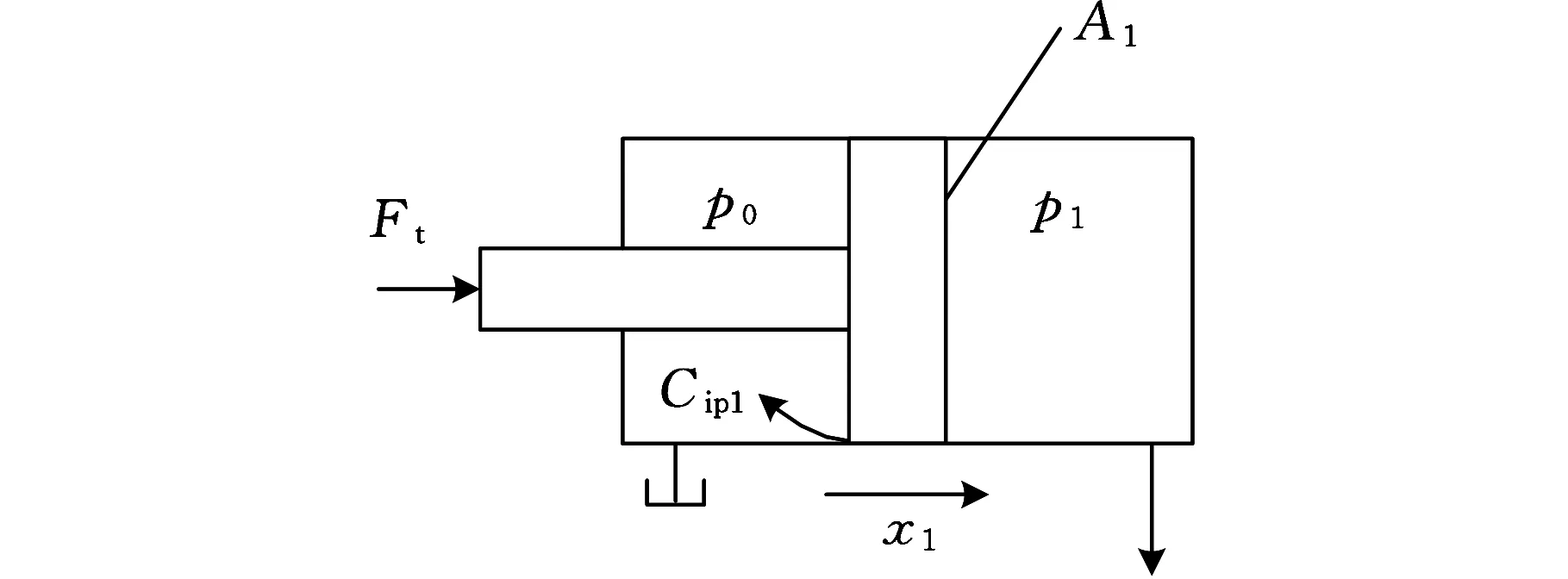
图3 丝杠推动液压缸活塞Fig.3 Screw drives the hydraulic cylinder piston
力平衡方程[9]:
(3)
流体流量方程[9]:
(4)
式中,V1为液压缸右腔(高压腔)与增压缸低压腔及油管总的有效体积;K1为液压油体积弹性模量;Cip1为内泄漏(包括液压缸和增压缸低压端的泄漏)系数。
液压缸输出的高压p1,经增压缸压力放大Z(Z为增压缸的增压比)倍后,增大到pc。超高压的压力油(压力为pc)进入压机的主油缸并推动顶锤作用于人造金刚石的合成腔。增压缸的驱动主油缸和负载结构如图4所示。
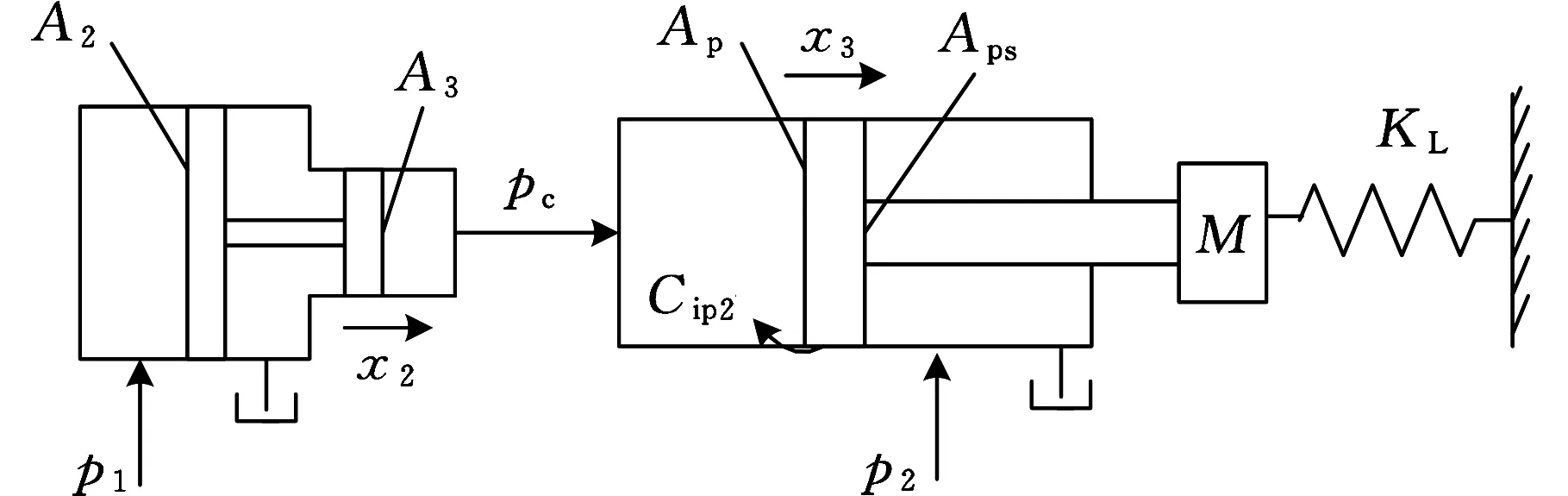
图4 增压缸驱动主油缸和负载结构示意图Fig.4 Structure schematic diagram of main cylinder and load driven by booster cylinder
人造金刚石晶体生长过程中,合成腔始终在6个顶锤的作用下形成一定的压缩量,使主油缸承受弹性负载力的作用。根据图4分别建立流量方程和力平衡方程[9]:
(5)
(6)
(7)
式中,A2为增压缸大腔的活塞面积;A3为增压缸小腔的面积;Ap为压机工作油缸无杆腔的活塞面积;Aps为压机工作油缸有杆腔的有效活塞面积;p2为压机主油缸的回油背压;m为增压缸活塞的总质量;M为压机主油缸活塞及负载的总质量;x2为增压缸活塞的位移量;x3为压机主油缸的位移量;V3为压机主油缸控制腔的有效容积;KL为弹性负载的弹性刚度;Cip2为内泄漏系数,包括主油缸和增压缸高压端这两部分的泄漏。
液压变送器输出一个与压力成比例的电信号:
H=Uf(s)/pc(s)=Kf
(8)
式中,Kf为液压传感器增益。
2.3 动力机构的传递函数
(9)
式中,Kp为压力增益。
3 电动直驱式超高压力控制系统的特性
分析
电动直驱式超高压力控制系统是一个零型系统,其开环传递函数主要由惯性环节、振荡环节和放大环节组成。
负载是一个很大的弹性负载,与其相关的频率ωa很大,且远大于增压缸的频率ωz、伺服电机的频率ωm和液压缸的频率ωh,所以式(9)可化简为
G(s)=
电动直驱式超高压力控制系统如图5所示。
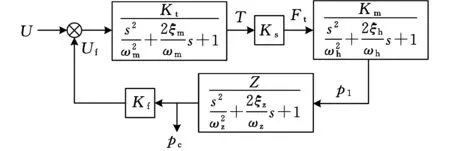
图5 电动直驱式超高压力控制系统框图Fig.5 Block diagram of direct electric driving ultrahigh pressure control system
3.1 固有频率
该系统有三个转折频率ωz、ωm和ωh,且ωh<ωz<ωm,所以系统的最低阶固有频率主要由ωh决定,这个参数的大小常常决定了伺服系统的响应速度。影响ωh的主要因素有液压缸面积A1、液体的弹性模量K1、油缸的有效容积V1以及液压缸活塞的质量mt。当选取较大的主油缸活塞面积、较大的液体弹性模量、较小的有效体积和活塞质量时,系统的最低阶固有频率将增大。目前,人造金刚石压机都是往大型化方向发展,主油缸直径越来越大[1],主油缸活塞的质量mt增大、油缸的有效容积V1增大,随之的ωh相应减小,将给系统的设计增加更多困难。
另外,在合成腔内石墨转变成人造金刚石晶体的过程中,晶体中心会产生压力降,由叶腊石包围的合成腔的弹性刚度会变化,带来负载刚度的减小,式(9)中的分子项的影响将不能忽略。
3.2 压力增益Kp

3.3 阻尼比
系统的阻尼比主要有ζh、ζz,影响它们的因素较多,起决定作用的两个因素是液压内泄漏系数Cip1、Cip2。液压缸的内泄漏系数增大时,系统的阻尼比增大。不同于常规的液压伺服系统,稳定工作时,长时间里类似一个等静压系统,主油缸和增压缸的泄漏系数一般不会有大的变化,系统的阻尼比也变化不大,这一点对此类系统的设计有益。ζz的表达式中,负载刚度KL很大,分子分母同除KL后,可知ζz主要取决于主油缸的泄漏系数Cip2和主油缸的液压弹性模量K2。
由式(9)可知阻尼比ζh大于ζz,但都比较小,估算在0.001~0.01数量级。
3.4 弹性负载的弹性刚度KL的影响
该系统存在一个弹性刚度很大的弹性负载。根据不同的KL绘制系统的幅值响应曲线,见图6,图中,幅频曲线的三个峰值按频率从小到大依次为ωh、ωc、ωz。KL发生变化时,所有参数都随之改变。KL增大时,ωz向右移动(增大),ωh与ωz之间的距离变大,穿越频率ωc增大(对数坐标下ωc变化不明显)。KL减小时,变化的情况相反。
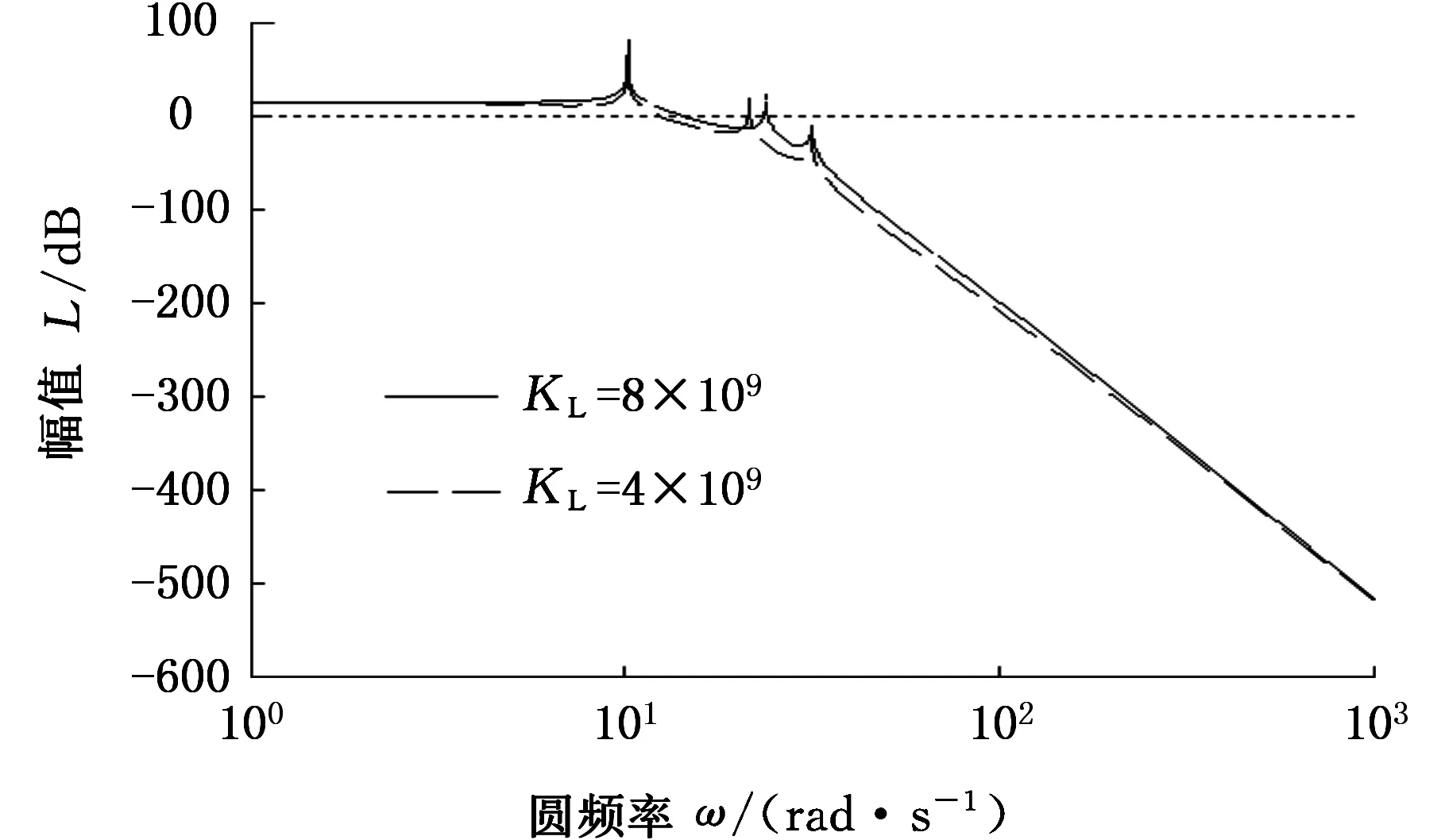
图6 KL值对系统的影响Fig.6 Impact of the value of KL on the system
针对电动直驱式超高压力控制系统设定下列参数:电机时间常数Tm=30 ms,电气时间常数为0.14 ms;丝杠导程l=10 mm;液压缸无杆腔活塞直径为200 mm,行程为300 mm,液压缸内泄系数Cip1=3×10-11m3/(Pa·s),油液体积弹性模量K1=690 GPa;折合到液压缸活塞上的总质量mt=25 kg,增压缸低压腔活塞直径为200 mm,增压缸高压腔活塞直径为80 mm,增压倍数Z=6,增压缸活塞的质量m=3 kg;压机主油缸压力腔柱塞直径为650 mm,压机主油缸活塞及负载的质量M=380 kg,压机主油缸控制腔的体积为0.18 m3,压机主油缸内泄系数Cip2=5×10-11m3/(Pa·s),其液体体积弹性模量K2=4.14 GPa。
由ζz的表达式仿真计算可得其开环频率特性图(图7)。该系统为零型系统,简化后,由1个比例环节和3个二阶振荡环节组成。系统在低频段需加校正才能稳定工作。
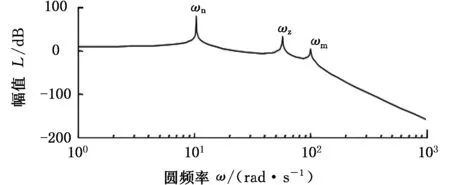
(a)幅频曲线
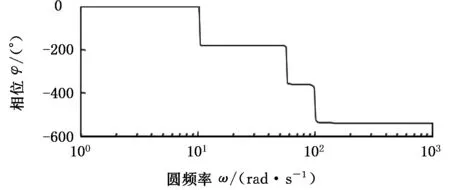
(b)相频曲线图7 超高压力控制系统的开环频率特性图Fig.7 Open loop frequency characteristics of ultrahigh pressure control system
4 单通道控制系统的仿真
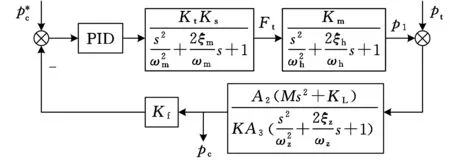
图8 PID控制单通道压力控制系统原理图Fig.8 Schematic diagram of one channel pressure control system with PID control

给定期望压力p*=90 MPa,反复调节PID参数后,得出单通道压力控制系统的阶跃响应图(图9)。图9中,上升时间为0.2 s,压力的稳定时间为0.4 s,采用传统PID控制算法压力控制系统即可获得具有良好的稳定性以及较好的跟随特性。
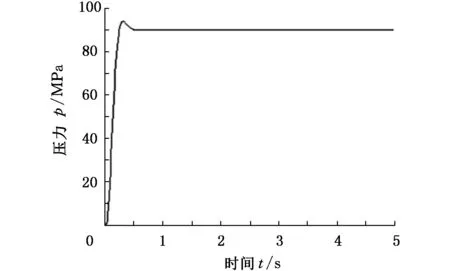
图9 压力响应曲线Fig.9 Impact curve of pressure
5 结语
对人造大理石六面顶压机超高压力的控制进行了研究,设计了一种电动直驱式的电液伺服动力机构,实现了超高压力的准恒压控制。通过建立电动直驱式超高压力系统的数学模型,推导了动力机构的传递函数,并对系统的特性进行了分析。结果表明:电动直驱式超高压力控制方式是可以实现的;系统的最低阶固有频率主要由液压缸面积、液体的弹性模量、油缸的有效容积,以及液压缸活塞的质量决定;系统的阻尼比主要决定于液压缸的泄漏系数,但变化范围较小;采用传统PID控制算法可以得到较好的控制效果。
在整个控制过程中,液压控制系统没有频繁使用小泵补油,所以不会引起较大的压力脉动和波动,提高了压力控制的精度。
[1] 方啸虎. 中国超硬材料新技术与进展[M]. 合肥:中国科学技术大学出版社, 2004.
[2] 刘建设. UDS-Ⅲ型六面顶高压合成装置及高品质金刚石的合成研究[D]. 长春:吉林大学, 2005. LIU Jianshe. Study for UDS-Ⅲ Hexahedra Gemel Hydraulic Press and Synthesis Technology of High Grade Diamond[D]. Changchun: Jilin University, 2005.
[3] HONG Yanhua, ZHEN Zhang. The Effect of Hexa-orientation Press Control System Development on Diamond Material Grade[J]. Advanced Material Research, 2012, 605/607: 1661-1664.
[4] 阮毅,陈伯时.电力拖动自动控制系统—运动控制系统[M].北京:机械工业出版社,2009. RUAN Yi, CHEN Boshi. Control Systems of Electric Drives-Motion Control Systems[M]. Beijing: China Machine Press, 2009.
[5] 王永强.滚珠丝杠进给系统自适应建模理论与研究方法[D].济南:山东大学,2013. WANG Yongqiang. Research on the Adaptive Modeling Theories and Algorithms of Ball Screw Feed Drive Systems[D]. Jinan: Shandong University, 2013.
[6] YE Yunyue, ZHU Ziqiang, ZHONG Shaobo. Dynamic Modeling and Tracking Control Simulation for Large Electro-hydraulic Servo System[J]. Applied Mechanics and Materials, 2013,416/417:811-816.
[7] 姜继海,苏文海,张洪波,等.直驱式容积控制电液伺服系统及其在船舶舵机上的应用[J].中国造船, 2004(4): 56-58. JIANG Jihai, SU Wenhai, ZHANG Hongbo, et al. Direct Drive Volume Control Electro-hydraulic Servo System and Its Application Ins Hip Steering[J]. Ship Building of China, 2004(4): 56-58.
[8] LAI C K, SHYU K K. A Novel Motor Drive Design for Incremental Motion System via Sliding-mode Control Method[J]. IEEE Transaction on Industrial Electronics, 2005, 52(2): 499-507.
[9] 李洪人.液压控制系统[M].北京:国防工业出版社,1990. LI Hongren. Hydraulic Control System[M].Beijing: National Defense Industry Press, 1990.
(编辑 张 洋)
Characteristics of Power Mechanism for Ultra-high-pressure Hydraulic System with Direct Electric Drive
XU Hong DU Zhijiang SHEN Jiali WANG Ling
College of Mechanical and Electrical Engineering, China Jiliang University,Hangzhou,310018
A hyper-pressure control hydraulic system with direct electric drive was introduced to solve the shortages brought by the conventional hydraulic control system, which was based on the isostatic pressing equipment for producing high-quality diamonds and other superhard materials. It was used as a pressure compensation method mainly for the packing stage which was important to high-quality diamonds. The operational principles of this system was introduced, and the mathematical model was built. Main parameters of dynamic mechanisms and frequency charaeteristics of open loop of the system were analysed, and the influences of the main parameters such as effective area of hydraulic cylinder, effective volume of compresstion chamber and elastic stiffness of load on system characteristics were argued.
ultra-high-pressure; direct electric drive; pressure control; power mechanism
2015-09-25
2016-11-30
国家自然科学基金资助项目(50475107);浙江省自然科学基金资助重点项目(Z106853)
TP271.31
10.3969/j.issn.1004-132X.2017.02.007
许 宏,男,1966年生。中国计量大学机电工程学院副研究员。主要研究方向为超精密驱动、流体动力控制、机电一体化技术。发表论文20余篇。杜治江(通信作者),男,1990年生。中国计量大学机电工程学院硕士研究生。E-mail:mop1208@163.com。沈佳丽,女,1989年生。中国计量大学机电工程学院硕士研究生。王 凌,男,1980年生。中国计量大学机电工程学院博士。
猜你喜欢
制造技术与机床(2019年11期)2019-12-04 05:50:26
铁道通信信号(2019年8期)2019-10-10 05:05:58
制造技术与机床(2018年12期)2018-12-23 02:41:24
制造技术与机床(2017年6期)2018-01-19 02:40:57
大电机技术(2017年3期)2017-06-05 09:36:02
上海大中型电机(2017年4期)2017-02-06 05:27:05
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
电测与仪表(2015年20期)2015-04-09 11:54:04
电机与控制应用(2015年7期)2015-03-01 03:50:11
机械制造与自动化(2014年1期)2014-03-01 04:21:45