机载Lidar建筑物点云中非建筑物点剔除研究
2017-02-06 15:44魏广宇
价值工程 2017年2期
魏广宇
摘要:激光雷达建筑物点云处理过程中往往会混入非建筑物点。本文将点云数据与数字线划图融合,进行粗提取建筑物点。然后借助大平面检索、去噪声、连通区域分析等分割技术完成预处理,选出小平面。这些小平面建筑物点、地面点和植被点等。再运用平整度将地面点和植被点小平面剔除。
Abstract: During the processing of Lidar points cloud of buildings,non-building points usually interfused. This article fused point cloud data with digital line to extract the building points roughly. And then with the help of segmentation, such as big planes detection, connected component analysis, small planes can be achieved which are building points, ground points and vegetation points. At last this article uses flatness to reject non-building points.
关键词:激光雷达;数字线划图;建筑物点云;分割;剔除
Key words: Lidar;digital line graph;building points;segmentation;reject
中图分类号:TN958.98 文献标识码:A 文章编号:1006-4311(2017)02-0031-03
0 引言
目前,众多应用领域对城市建筑物三维模型都有较大的需求[1]。在大规模地形测绘中,Lidar近十年来渐渐成为主流方法。建筑物点属于非地面点,点云滤波是Lidar数据处理的首要任务,主要目的是将点云分成地面点和非地面点[2]。依据滤波原理来分可以分为基于表面模型、基于坡度或斜率、基于分割三种[3]。当前滤波算法在处理地形不连续区域或存在复杂建筑物区域时容易过分腐蚀地形并难以去除一些低矮植被这是影响建筑物点精度的根本问题[4]。后续操作中建筑物点的提取方法有很多,但这些方法总是根据不同区域因地制宜进行提取,而且这些方法往往适用于无植被覆盖的建筑物区域。由于机载雷达探测范围为大面积城市区域,不论我们如何滤波、用何种方法提取建筑物,总会存在建筑物点的精度问题。经过分析这些非建筑物点往往是地面点和植被点。在建筑物点云分割时如何将地面点和植被点剔除是本文的研究内容。实验区选取要求建筑物层次分明,整齐规则,适合新处理方法的实验,一般为发达城市地区。本文研究区域中心位于荷兰DenBosch附近。文中laser点云数据来自AHN2。AHN2是一个包含所有荷兰详细精确高程数据的文件。文中laser点的密度是每平方大约20个。数字线划图来自BGT(注册大规模地形),它是统一包含了荷兰所有地物的地形文件。
1 流程与原理
本文非建筑物点的剔除基于点云的分割完成。分割的本质就是将数据分割成若干个互不相交的子集,每一个子集中的数据同属于一个具有单一特征的曲面。具体说来就是给同一个表面上的点赋予同一标记,不同表面的点赋予不同标记[5]。本文分割方法是基于面的分割,基于面的区域分割方法是具有相似性质的点集合起来构成区域。首先对每个需要分割的区域找出一个种子点作为生长的起点,然后将种子周围邻域与种子点相同或相似的点归并到种子所在的区域中。而新的点继续做种子向四周生长,直到再没有满足条件的点可以包括进来,一个区域也就生长而成了[6]。
1.1 数据预处理
本文首先对原始点云数据和数字线划图进行融合,目的在于对三维点云数据完成粗提取并添加建筑物属性和多边形ID属性。数字线划图是由多边形拓扑而成的二维数据[7],经过坐标转换统一两数据坐标然后实现数据融合。给所有建筑物多边形赋予ID编码和类别编码,落入建筑物多边形区域内的点认为是建筑物点,赋予点相对应的ID编码和类别编码。本文选择用FME Workbench来实现数据融合。FME Workbench(Feature Manipulate Engine,简称FME)是加拿大Safe Software公司开发的空间数据转换处理系统,它是完整的空间提取(extract)、转换(transform)、加载(load)解决方案。首先通过滤波后的Lidar数据和放大的数字线划图进行融合处理,完成建筑物的粗提取。数字线划图与点云数据并不能很好的精确匹配,将数字线划图边界扩大0.5米,将落入数字线划图建筑物多边形区域的点暂时认为是建筑物点云。由于数字线划图的放大,会融入非建筑物点。数字线划图中的每个多边形会包含多个物体,并且一个物体(如一栋建筑)不在多个多边形内对于非地面点,我们逐个多边形用曲面生长方法检测大平面。此时多边形为扩大边界后的多边形。大平面认定为屋顶和墙体,检索到的大平面认为是建筑物点。将这些点赋予建筑物属性编码和多边形ID编码。
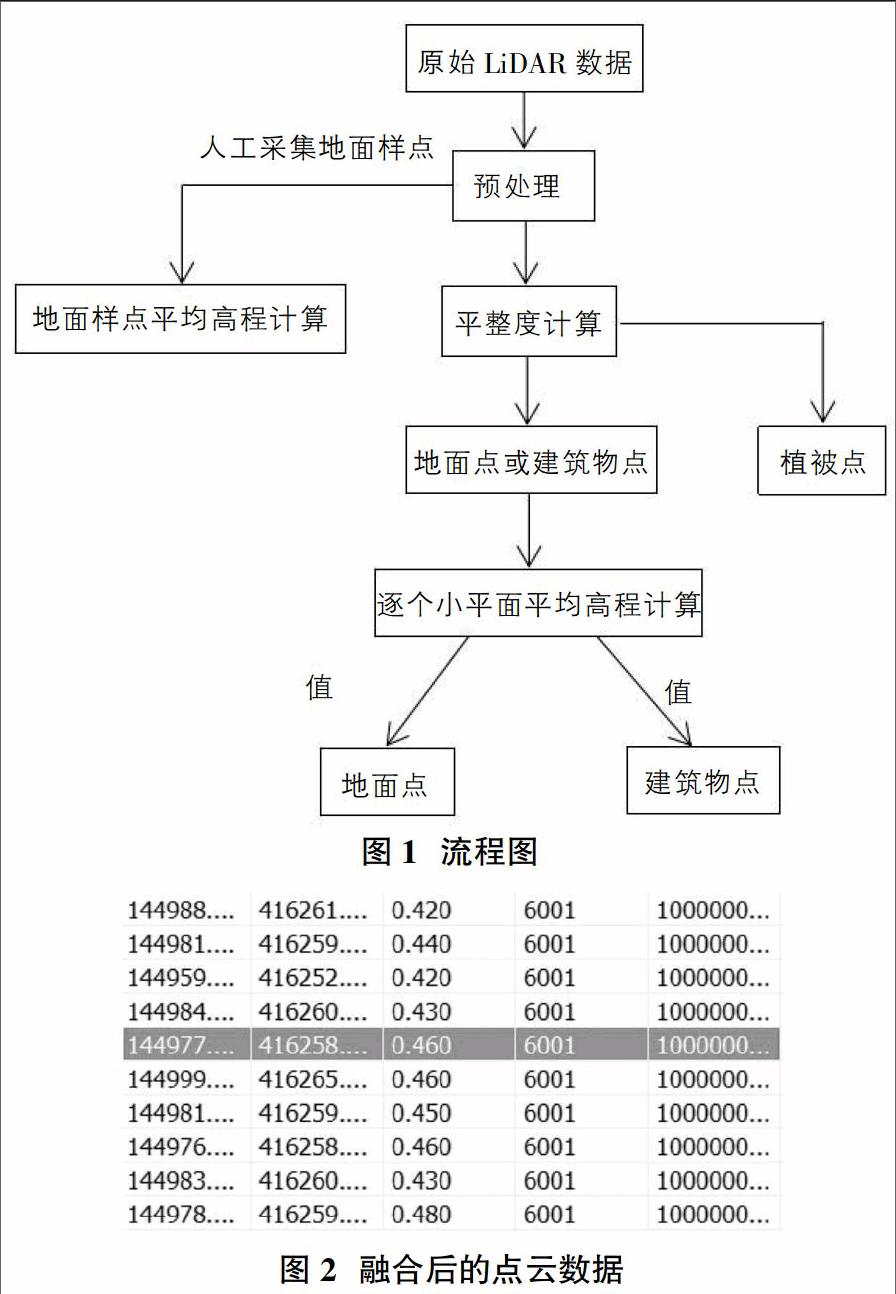
然后对非建筑物点进行去噪声来剔除粗差点。将区域内未分割的点进行连通区域分析,得到一部分小平面,此小平面为墙体、地面点和植被点。连通区域(Connected Component)一般是指图像中具有相同像素值且位置相邻的前景像素点组成的图像区域(Region,Blob)。连通区域分析(Connected Component Analysis)是指将图像中的各个连通区域找出。对于这些小平面点,我们逐步计算每个点与邻域内点协方差矩阵计算每个点邻域平整度,设置平整度高低的阈值来判断单点的平整度大小。然后小平面内设置平整度高低比例阈值来判断该小平面是否平整。不平整的小平面我们认为是植被点,剔除之。平整小平面为地面点或建筑物点。人工选取初始点云中地面点样本,计算出地面点的平均高程,比较剩余小平面的平均高程,若与地面点平均高程接近则判定该小平面为地面点,剔除之。流程图如图1所示。
1.2 非建筑物点的剔除
我们做地面点和植被剔除基于以下三个物理特征:
①植被为无规则平面。
②道路平滑又水平,平均高度与地面点平均高度相同。
③屋顶平面高于地面点。
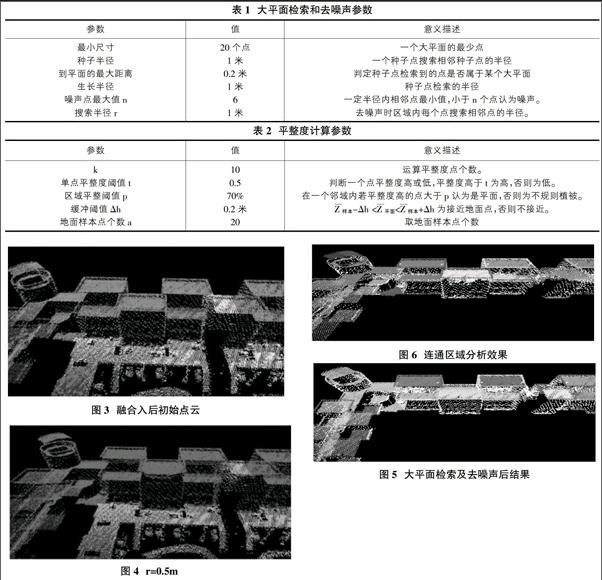
设定单点平整度阈值t来判断一个点在其邻域k个点的平整度大小。若Fλ≥t则该点为平整度大的点;若Fλ 再设置一个阈值p来判定小平面内高平整度的点比例多少。若该小平面内高平整度点数大于等于p则判定该区域为光滑平整的面;若该小平面内高平整度的点小于p,则判定该平面不平整,属与植被,剔除。此时我们还需要剔除地面点。 在初始样本中人工选取地面样本点a个,计算其平均高程Z样本=。在剩余小平面内逐个计算其所有点平均高程Z平面,我们设置一个缓冲阈值Δh来表述两个平均高程是否接近。值若Z样本-Δh 此时完成了地面点和植被点的剔除。 2 实验结果与分析 2.1 实验结果 与数字线划图融合后的点云会包含如下几个属性。第一列到第三列分别为XYZ三维坐标,第四列表示地物类别表示为建筑物,第五列表示多边形ID。点云融合后的数据如图2所示。 由于存在误差和形变,数字线划图往往不能与点云数据完美匹配,这会造成一些建筑物点云散落在建筑物多边形外,试验中将多边形的边界扩大一个值r=0.5米。图中红色点为建筑物点。图3为初始融合的效果图,图4为多边形边界扩大后的效果图。 为了分割得到屋顶和部分墙体,做大平面检索。大平面检索后对于剩余的非地面点去噪声。选取一定半径对每个点进行搜索,认定相邻点数少于特定值的点为噪声点。把噪声去除后通过连通性逐个多边形进行检索。连通区域分析的参数和去噪声参数同样根据点密度和实景确定。这个过程会得到一部分屋顶小平面、一些墙体和一些地面点和植被,需要将地面点和植被剔除。结果和参数如图5和表1所示。 通过连通区分析和平整度计算,我们又可以得到一部分建筑物点,赋予建筑物属性编码和多边形ID编码。联通区域分析效果图和参数设置如图6和表2所示。 2.2 实验分析 图3是初始点云与数字线划图融合结果,建筑物轮廓基本得到,但是空中悬浮的蓝色点并未识别,根据经验其也应为建筑物点。将建筑物多边形扩大得到图4,在多边形边界扩张之后,空中悬浮点基本被建筑物点侵蚀,但地面蓝色点也有一部分被圈入了建筑物。大平面检索之后几乎全得到了屋顶,以及得到部分墙体。但是有图5可看出建筑物底部存在地面点的混入。图6已经做了平整度计算,我们看到,在图5的基础上,经过去噪和连通区域分析后大平面被分割的更加细致,表现在单一颜色大平面被几种色彩所代替。但是由于图6又做了道路和植被的剔除,图5中建筑物底部过度侵蚀的地面点有所减少。本次基于分割的非建筑物点云剔除有所成效。 参考文献: [1]张志超.融合机载与地面LIDAR数据的建筑物三维重建研究[D].武汉大学,2010. [2]余洁,张国宁,秦昆,杨海全.LIDAR数据的过滤方法探讨[J].地理空间信息,2006(04):8-10. [3]周晓明.机载激光雷达点云数据滤波算法的研究与应用[D].解放军信息工程大学,2011. [4]胡举,杨辽,沈金祥,吴小波.一种基于分割的机载Lidar点云数据滤波[J].武汉大学学报(信息科学版),2012,03:318-321. [5]欧新良,,匡小兰,倪问尹.三维散乱点云分割技术综述[J].湖南工业大学学报.2010,24(5). [6]胡怀宇,崔汉国,代星.基于区域生长法的散乱点云分区方法[J].计算机应用,2009,29(10):2716-2718. [7]石磊.数字线划图三维编辑技术的研究与应用[D].解放军信息工程大学,2009. [8]李杰,程效军.三维激光扫描仪在墙面平整度检测中的应用[J].井冈山大学学报(自然科学版),2014(04):13-17.
猜你喜欢
北京测绘(2022年5期)2022-11-22
中国交通信息化(2021年8期)2021-11-02
汽车观察(2021年8期)2021-09-01
空间科学学报(2020年6期)2020-07-21
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26