
楔条形阳极紫外探测器图像畸变校正
2017-02-03 05:04李宇嘉付利平王永松
电子设计工程 2017年21期
李宇嘉 ,付利平 ,王永松
(1.中国科学院国家空间科学中心北京100190;2.中国科学院大学北京100049)
随着空间探测技术的迅速发展,紫外波段的星载探测和应用得到越来越多的重视。由于空间紫外探测中的辐射强度较弱,接近于单光子状态,因此需要进行光电转换和光子计数成像。楔条形阳极紫外探测器由于探测灵敏度高、信噪比高、背景噪声低等优点,被用来针对特定微弱光进行成像探测[1-2]。目前,楔条形阳极紫外探测器已经被广泛用于从近紫外到X射线的空间探测。美国于1992年发射的EUVE卫星和2000年发射的IMAGE卫星上均搭载了基于微通道板的楔条形阳极探测器[3],现在国外的阳极探测器已经不局限于楔条形阳极,又发展出延迟线阳极、游标阳极、交叉条纹阳极等多种位敏阳极[4]。而楔条形阳极因为其制作简单、电子读出电路设计较容易、空间分辨率高的原因,成为国内的研究重点[5]。
气辉和极光是重要的地球辐射背景,与太阳活动周期、地磁活动强度以及高层大气、电离层的状态关系紧密,对于空间探测有着重要的意义。对气辉极光进行成像探测是探测领域的发展趋势,而楔条形阳极探测器是开展成像探测的关键部件之一,其成像质量好坏将直接影响探测数据定量化应用。本文针对用于极光气辉的楔条阳极探测器图像畸变校正算法进行研究。
1 楔条形阳极紫外探测器成像原理
楔条形阳极探测器主要由光学输入窗、光阴极、微通道板、Ge感应层、WSA以及电子读出电路组成。如图1所示,单光子从光学输入窗进入探测器,打在光阴极上激发光电子,光电子经过Z形级联的微通道板(MCP)倍增,输出106~107个电子,形成电子云团[6]。电子云团可以直接被位敏阳极收集,但直接被阳极接收不适合做成真空器件,还存在由于漂移电场而引起的静电场畸变和电子云偏差较大的缺点,所以我们采用感应式的收集方法[7]。电子云先打在呈高阻抗性的半导体Ge膜上,然后通过电荷感应,将Ge膜上收集到的电荷耦合到楔条形阳极上[8]。楔条形阳极由楔形阳极、条形阳极、Z形阳极3块阳极组成,由电子云团在3块阳极上的电荷分布比例可以计算出电子云团质心的位置,从而得到单光子的位置[9]。而电子云的电荷分布比例,则是通过电子读出电路将电荷转变成电压,然后计算得出。
电子云的大小受到MCP增益、MCP和Ge膜之间的距离、Ge膜的陶瓷基底厚度、阳极加速电压等多种因素影响,没有精确的公式可以计算[10]。当电子云较小时,会导致成像出现调制畸变,而当电子云较大时,会导致成像出现“S”畸变。并且楔条形阳极的3块电极之间也存在较严重的极间串扰,使成像在x=y、x=-y方向存在压缩[9]。
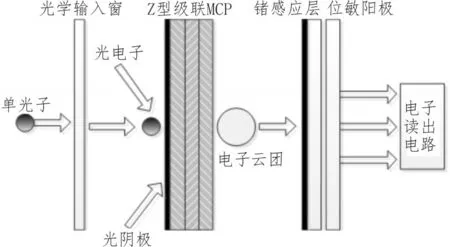
图1 单光子成像原理示意图
2 多项式校正方法
楔条形阳极紫外探测器的成像受到调制畸变、“S”畸变和极间串扰等多种畸变的影响,尽管我们针对特定畸变进行了专门的畸变校正处理,比如调节MCP和Ge膜之间的距离、修正位置公式等,然而最终的结果还是有可能受到这几种畸变的影响,所以还需要针对最终的成像进行校正,而多项式校正方法就是遥感图像畸变处理中常用的方法之一[11]。使用多项式校正法可以对多种畸变共同作用下的图像进行校正,因为它不需要考虑导致畸变的具体原因,只需要比较畸变图像与标准图像之间的差别,得到它们位置坐标的关系就可以实现校正。
首先,我们建立一个空间几何模型,得到一组已知位置的控制点,然后,通过对建立的空间几何模型成像得到存在畸变的控制点的位置,建立两组控制点之间的映射关系,得到表征正确的控制点的位置的多项式:

其中,(Zx,Zy)表示正确点的像素位置,(x,y)表示对应的存在畸变的点的像素位置。正确点的横坐标或者纵坐标,与存在畸变的点的横、纵坐标皆存在一定关系,Mx、My分别表示正确点的横坐标中x和y的最高阶数,同理,Nx、Ny分别表示正确点的纵坐标中x和y的最高阶数。
有了公式模型,就是要通过控制点的坐标求解多项式系数,因为系数太多,求解难度较高。由公式可以发现,Zx、Zy与x、y的关系可以抽象成曲面方程,因此可以使用MATLAB中的曲面拟合工具箱(Surface Fitting Tool)方便地求解多项式系数,并且曲面拟合工具箱提供对拟合结果的精确性的判断指标:误差平方和(SSE)、复相关系数(R-square)。
3 图像校正实现
楔条形阳极探测器的控制和显示软件往往采用LabVIEW进行编写[13-14]。而LabVIEW在处理复杂的图像像素位置计算时,速度十分缓慢,因此图像像素位置的计算和处理需要用C++进行编写,然后以dll模块的方式被LabVIEW调用。Dll模块的示意图如图2所示,输出图像的高度和宽度要比输入图像设置的大一些,避免校正后的图像超出范围,引起错误。
畸变图像的灰度值数据保存在一个1 024×1 024的二维数组,图像校正的过程就是从中读取每个像素的灰度值,然后通过公式(1)计算出正确的位置坐标,将灰度值赋值在新的二维数组中,最后根据新的二维数组显示图像。

图2 dll模块示意图
4 楔条形阳极探测器成像畸变校正
为了验证该多项式模型以及图像校正算法的可行性,使用实验室拥有的楔条形阳极紫外探测器进行了校正实验。该探测器有效面积为φ25 mm,光谱范围120~180 nm,MCP的增益≥106,工作电压为3 100 V。
图3是一个36孔的掩模板照片,其中掩模板的孔径为2 mm,中心间距为6 mm。将该掩模板放置在探测器的入射窗处,使用氙灯和平行光管提供平行光,平行光经过掩模板入射到探测器的光学输入窗,经过探测器的处理成像并上传到计算机显示。

图3 掩模板

图4 实验装置示意图
探测器的成像显示在计算机上,如图5所示,在y=x方向被压缩导致图像出现明显倾斜,并且垂直方向的小孔间距大于水平方向。第一列第一个和第4个点受畸变影响明显,无法读到坐标,所以排除,读取剩下的12个点的坐标。将这12个点的横坐标写成一个数组X,纵坐标写成一个数组Y,将对应的正确点的横纵坐标分别写成数组Zx、Zy。因为图像畸变并不存在复杂的非线性畸变,所以只需要进行三阶的多项式矫正就可以得到理想的结果。如图6所示,修正后的图像小孔间距一致,无明显畸变。修正图像的横坐标拟合结果误差平方和(SSE)为0.998 6,复相关系数(R-square)为1;纵坐标拟合结果误差平方和(SSE)为0.980 7,复相关系数(R-square)为1。拟合的指标表明,拟合结果与目标图像十分相近。
图5 修正前小孔图像
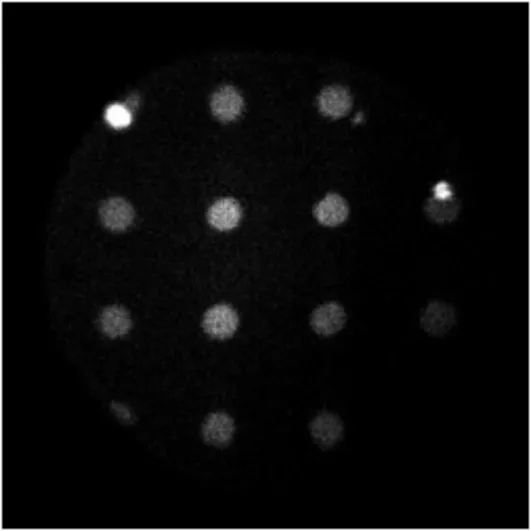
图6 修正后小孔图像
为了评估图像校正的效果,计算畸变图像、校正图像与构建的标准图像的小孔位置的偏差E,并对所有小孔的偏差求平均值,得到平均偏差-E来表征图像的畸变。

由公式(2)计算可得,畸变图像的平均偏差为17.6像素,而校正图像的平均偏差为2.7像素。由此可知,校正的效果较好。
在入射窗处放置USAF 1951分辨率板[15],进行成像,结果如图7所示。运用由掩模板得到的多项式进行校正,得到的结果如图8所示。可以明显看出分辨率板的形状得到改善。如果要获得更好的校正效果,需要减小小孔的大小和间距,并增加小孔数量,以增加样本数量,可以进行更高阶次的拟合,消除复杂的非线性畸变。
5 结论

图7 修正前分辨率板图像

图8 修正后分辨率板图像
对位置灵敏阳极光子成像探测器图像进行畸变校正,通过建立多项式模型,结合使用MATLAB的曲面拟合,极大的简化了畸变校正的步骤,并通过设计dll模块,实现了LabVIEW[16-17]的图像修正算法,解决了LabVIEW图像坐标计算速度慢的问题。最后,通过实验验证了该套校正方法的可行性,达到了设计要求。
[1]刘晓红,王咏梅,王永松.高速远紫外光子计数成像读出电路设计[J].空间科学学报,2015(1):110-115.
[2]于磊,王淑荣,林冠宇.星载电离层探测成像光谱技术发展综述[J].地球物理学进展,2012(6):2308-2315.
[3]尼启良,卜绍芳,刘世界,等.微通道板光子计数成像探测器预处理实验研究[J].光子学报,2012(6):658-663.
[4]赵菲菲.基于MCP的紫外光子计数探测器关键技术研究[D].北京:中国科学院研究生院(西安光学精密机械研究所),2010.
[5]何玲平.极紫外光子计数探测器成像特性研究[D].北京:中国科学院研究生院(长春光学精密机械与物理研究所),2010.
[6]尼启良.极紫外微通道板光子计数成像探测器性能研究[J].光学学报,2013(11):28-32.
[7]尼启良,何玲平,刘世界,等.使用感应电荷位敏阳极的极紫外单光子计数成像系统[J].光学精密工程,2010(12):2543-2548.
[8]韩素立.远紫外感应式阳极光子计数成像探测器研究[D].北京:中国科学院研究生院(长春光学精密机械与物理研究所),2014.
[9]尼启良.使用曲面微通道板和感应电荷位置灵敏阳极的软X射线-极紫外光子计数成像探测器研究[J].中国光学,2015(5):847-872.
[10]刘永安,鄢秋荣,盛立志,等.电荷云尺寸对紫外光子计数成像探测器性能的影响[J].物理学报,2011(4):778-784.
[11]何玲平,岳巾英,刘世界,等.光子计数位置灵敏探测器畸变多项式校正[J].光学学报,2012(6):15-20.
[12]何玲平,岳巾英,陈波.一种MCP光子计数位置灵敏探测器图像采集系统[J].光学仪器,2013(5):75-79,89.
[13]卜绍芳.极紫外波段微通道板光子计数位置灵敏阳极成像探测器性能研究[D].北京:中国科学院研究生院(长春光学精密机械与物理研究所),2011.
[14]韩素立,尼启良,张宏吉,等.微通道板增益对光子计数探测器成像性能影响[J].应用光学,2014(3):484.
[15]韩素立,陈波,尼启良,等.光子计数探测器感应位敏阳极的电子云扩散[J].光学精密工程,2014(7):1732-1736.
[16]汪赟,郝秀春,李伯全.基于LabVIEW的人脸视频实时心率测量系统[J].电子科技,2017(7):94-98.
[17]廖海黔.基于LabVIEW信号发生器控制界面软件设计[J].电子科技,2014(7):148-150.
猜你喜欢
化学教学(2022年4期)2022-05-07
小学生学习指导(中年级)(2021年5期)2021-05-18
读写算(2020年32期)2020-12-17
活力(2019年19期)2020-01-06
丝路视野(2018年1期)2018-05-14
摄影之友(影像视觉)(2017年10期)2017-11-07
中学课程辅导·教师教育(上、下)(2017年12期)2017-07-01
中国工程咨询(2015年6期)2015-02-16
西南国防医药(2014年2期)2014-03-04
癌变·畸变·突变(2014年2期)2014-03-01
