隐马尔可夫模型在多目标自动检测和跟踪中应用
2017-01-20 05:41蒋小勇周胜增
声学与电子工程 2016年4期
蒋小勇 周胜增
(上海船舶电子设备研究所,上海,201108)
隐马尔可夫模型在多目标自动检测和跟踪中应用
蒋小勇 周胜增
(上海船舶电子设备研究所,上海,201108)
自动检测和跟踪作为声呐系统的一项重要功能,使声呐兵从目标轨迹的检测、维护和撤销等繁重的操作解脱出来,提高了声呐兵的监控效率。然而实际应用中面临着低信噪比、轨迹交叉和轨迹转向等复杂情况,声呐系统很难有效地实现对多目标的自动检测和跟踪。针对这种多目标复杂情形,提出了一种基于隐马尔可夫模型多目标自动检测和跟踪的方法。它根据声呐宽带检测的波束数据,利用前向后向算法估计目标轨迹的状态,并采用连续检验对每条轨迹进行检测。该方法能有效地对多目标进行全自动检测和跟踪,解决目标轨迹交叉引起的错跟和跟丢问题,并能估计目标轨迹的起止时间。仿真和海试数据处理结果验证了该方法的有效性。
被动声呐;隐马尔可夫模型;连续检验;自动检测和跟踪
目标检测和跟踪作为声呐的主要功能,它将其输出的连续方位信息用于目标运动分析(Target Motion Analysis,TMA)和目标识别,而后声呐才能对目标距离和速度进行估计,因此目标检测和跟踪的质量直接影响声呐后置处理的性能。被动声呐一般通过宽带能量检测得到方位谱数据,以时间方位历程图(Bearing-Time Recording,BTR)形式进行显示,并在BTR显示图上录取目标进行跟踪。工程上经典的跟踪算法[1]是在检测目标后启动跟踪波束进行的,即检测与跟踪是序贯进行的。在多目标等复杂环境下,声呐兵人工监控的效率降低,在极短时间内对BTR图中信息难以作出判决。这就需要对时间方位历程图上的目标轨迹进行全自动的检测和跟踪。Benjamin Shapo[2]将概率密度函数(Probability Density Function,PDF)跟踪器应用在美国WSQ-11反潜声呐中。该方法采用马尔可夫动态模型和贝叶斯准则进行预测和修正,通过预处理、跟踪和检测三步来完成BTR上目标跟踪和LOFAR(Low Frequency Analysis Recording)图线谱跟踪,并通过互斥处理消除多目标PDF耦合,实现对多目标的跟踪,但不易处理交叉目标。陈伏虎[3]将目标的方位信息和能量结合起来,采用一种基于阵元域联合检测和跟踪方法来提高对弱目标的检测和跟踪能力,但受限于目标为非快速机动。Bryan A Yocom[4]根据数据融合思想,将干扰目标的位置作为先验信息,利用贝叶斯跟踪实现对感兴趣目标检测和跟踪,但需事先知道干扰目标个数和位置信息。Kevin Brinkmann[5]给出一种基于多假设跟踪(Multi Hypothesis Tracking,MHT)的多目标自动跟踪方法,该方法通过对目标轨迹状态估计、数据关联和轨迹管理来实现对所有可检测目标(包括弱目标在内)的的跟踪,同时使虚假轨迹数最小。Kristine L Bell[6]将最大后验惩罚函数跟踪、似然比检测与跟踪、谱跟踪结合起来,给出一种未知色噪声背景下多目标自动跟踪方法,把检测和跟踪看作是联合检测和估计。Didier Billon[7]将隐马尔可夫模型(Hidden Markov Model,HMM)和跟踪置前检测(Track-Before-Detect,TBD)相结合,利用连续马尔可夫检测器,把频率、频率变化率、方位及方位变化率作为HMM的状态,实现LOFAR图上线谱的自动检测和跟踪。
本文提出了一种基于隐马尔可夫模型多目标自动检测和跟踪方法。它采用前向后向算法对BTR上目标轨迹进行状态估计,然后根据连续检验对每个目标轨迹的起始和终止时间进行检测。该方法属于一种跟踪置前检测,能有效对多目标进行跟踪,解决多目标交叉问题,并能估计目标轨迹的起止时间。
1 HMM原理
HMM模型由若干个状态组成,随着时间的变化,各个状态之间可以发生转移,也可以在一个状态内驻留,每个观测序列对不同状态都有相应的输出的概率。由于被动声呐时间方位历程图中目标的轨迹随着时间变化,因此目标轨迹对应的状态可用马尔可夫链来描述。
1.1 HMM描述

由于方位历程图上目标轨迹可能存在交叉,因此状态除了考虑方位外还需方位的变化率,则目标轨迹状态矢量可以表示为:

于是,目标轨迹对应的各个状态可由状态方程来描述:

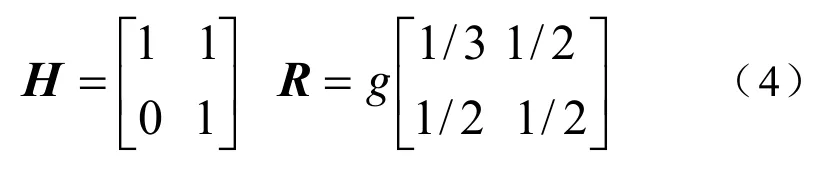
式中,H为状态矩阵,kη为零均值加性噪声。协方差矩阵为R,则状态矩阵和协方差矩阵分别可表示为:
初始状态的先验信息未知,因此常需要假定初始状态分布为均匀分布,则初始概率分布为:

目标在k时刻的状态由方位和方位的变化率来描述。假定状态转移概率矩阵表示为,则状态转移概率可表示为:
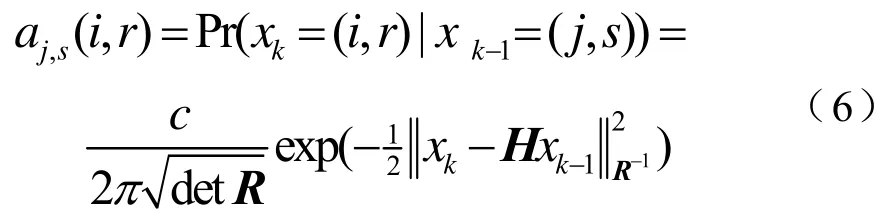

式中,Pk,i表示到k时刻状态i的方位谱。由于假定的模型不是确定的,而是一阶马尔可夫链,因此目标轨迹的状态序列对应着长时间功率谱积分的最大值。
1.2 前向后向算法
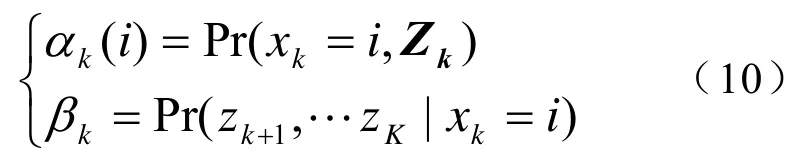
前向后向(Forward Backward,FB)算法是一种局部最优法,它是状态的最大后验概率估计。根据观测数据Zk来估计目标轨迹可能状态,用公式表示为:

根据FB算法估计目标轨迹的状态可表示为:

2 HMM检测和跟踪
传统目标跟踪思想是先对目标进行检测即跟踪初始化,然后再沿着时间对目标的轨迹进行跟踪,可以概括为先检测后跟踪。HMM自动检测跟踪首先根据FB算法对目标轨迹进行跟踪,估计目标方位所对应的状态,然后利用连续检验来判断目标的轨迹是否存在。因此,在某种意义,HMM自动检测和跟踪可以看作是一种“跟踪置前检测”。图1给出了HMM自动检测和跟踪框图。
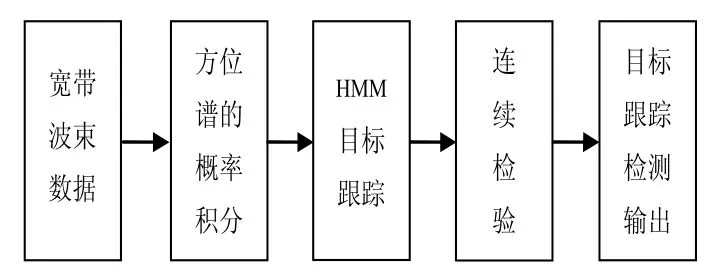
图1 HMM自动检测和跟踪框图
2.1 多目标跟踪
一般,被动声呐的时间方位历程图上同时存在多个目标轨迹,而且目标轨迹间相互交叉。因此,实际所遇到的问题需要对多个目标轨迹进行同时跟踪处理。假设时间方位历程图上存在L个目标,则L个目标轨迹的最大后验概率估计可表示为:

当时间方位历程图上同时存在多个目标轨迹时,多个目标同时跟踪处理较复杂。本文采用互斥事件和马尔可夫近似来解决处理过程中产生“组合爆炸”问题。为了避免FB算法返回相同L个目标轨迹(通常为最强的轨迹),将互斥事件作为前后向概率的条件,于是定义k时刻l事件为:

多目标跟踪处理是基于互斥事件和马尔可夫近似假设。在这个假设前提下对FB算法进行修改,采用一种并行结构的FB算法对多目标进行同时跟踪处理。假设L个目标轨迹所对应的L个马尔可夫链过程是相互独立的。由于每个目标轨迹对应状态由方位和方位变化率两维矢量组成,因此HMM模型中相应的前向概率和后向概率需用二维来表示。根据互斥事件可知,FB算法中概率是以互斥事件为条件的概率,则多目标跟踪的前向递推公式为:


多目标同时跟踪处理需要消除多目标的前向概率或后向概率相互耦合,借鉴文献[10]处理多目标跟踪的思想,还需要对上述公式进行加权处理。定义两个变量如下:
则由式(25)可得修改的FB算法为:

2.2 目标轨迹检测
在时间方位历程图中,目标轨迹并不是在整个观测时间内存在。因此,目标跟踪必须估计目标轨迹在BTR上的起始和结束时刻,这就需要检测所跟踪的目标轨迹在观测的时间内是否存在。根据统计理论可知,可采用统计检验来判决目标轨迹是否存在。若第k时刻所观测数据为,假设H0表示为方位历程图不存在目标轨迹,zk似然概率为;假设H1表示为方位历程图存在目标轨迹,zk似然概率为,则时间方位历程图上目标轨迹的有无可用二元假设来表示为:
在上述两种假设条件下,若观测数据是“无记忆”的,即只与当前观测数据有关。根据贝叶斯准则,将所得的似然比与设定的门限比较,则可以判断目标轨迹是否存在。
然而,实际中观测数据在一段时间内是持续的。由于统计检验是一种瞬时检验,它只利用当前时刻的信息,而与当前时刻以前的信息无关。因此,本文采用连续检验(Sequential Test)来检测目标的轨迹在观测时间内是否存在。若所跟踪的目标轨迹在第k−1时刻和第k+1时刻都存在,则根据连续检验,可判断目标轨迹在第k时刻也存在。由于连续检验和FB算法机理相似,因此可将一种类似FB算法应用连续检验来判断BTR上目标轨迹是否存在。定义新的状态dk,其中dk=0表示目标轨迹不存在,dk=1表示目标轨迹存在。若把目标轨迹存在或不存在当作两种状态,可将所处的状态看作一阶马尔可夫链,则根据FB算法可估计目标轨迹在观测时间有无。由于目标轨迹状态只有存在或不存在两种状态,因此状态转移概率矩阵可定义为:
似然概率矩阵为:
根据统计模型,似然比可表示为:

把式(30)代入式(29)中,得似然概率矩阵为:
根据HMM前向概率式(19)和后向概率式(20),经过数学推导,可将式(32)的似然比写为:
3 仿真和试验数据处理
3.1 仿真数据分析
假设均匀线列阵由48个水听器组成,按半波长布阵,采样频率为12 kHz。设定两个目标信号,其中一个目标为频率1 500 Hz单频信号,在10~48 s内存在,其方位从45°以1°/s变化到85°;另一目标为宽带信号,带宽为1 000 Hz,在10~45 s内存在,其方位从105°以1°/s变化到65°;背景噪声为海洋环境噪声,信噪比分别为−15 dB,−10 dB。
图2给出宽带检测BTR仿真结果,在t=30 s两个目标轨迹相互交叉,而且两个目标轨迹只在部分观测时刻内存在。图3给出目标轨迹检测结果,在t=10 s时刻检测到目标1轨迹出现,在t=45 s时刻检测目标1轨迹结束。图4给出HMM自动检测和跟踪结果,从图4可以看出,HMM目标跟踪有效跟踪两个相互交叉目标,而且能给出每个目标轨迹的起止时间。

图2 宽带检测BTR
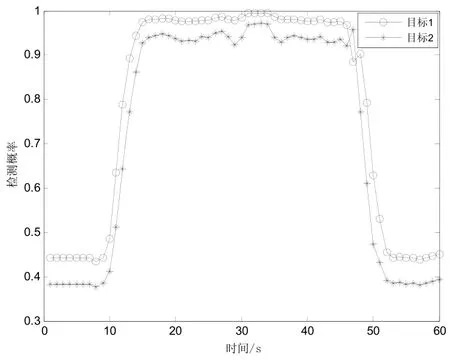
图3 目标轨迹检测
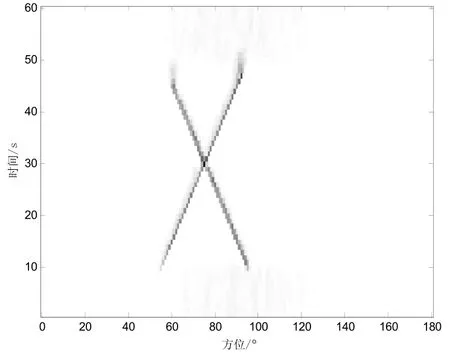
图4 HMM自动检测和跟踪
3.2 试验数据处理
为了进一步验证所提算法的有效性,本节给出了一组试验数据来进行分析。试验数据通过均匀线列阵获取,并对接收的数据进行检测和跟踪处理。
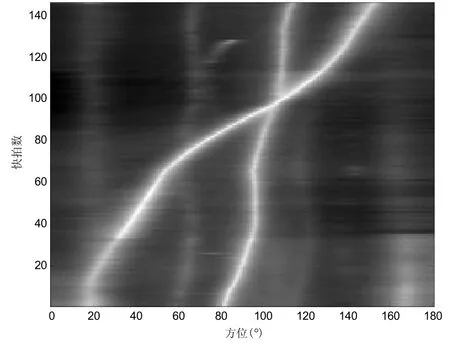
图5 宽带检测BTR
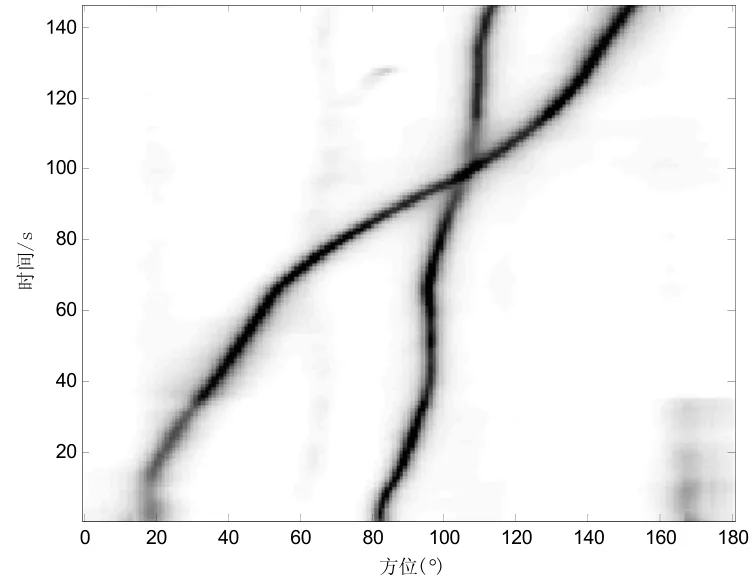
图6 HMM自动检测和跟踪
图5是某试验数据宽带检测处理结果,从图中可以看出,在观测时间内同时存在多个目标轨迹,而且目标轨迹之间相互交叉。图6是对图5宽带检测输出的数据进行HMM自动检测和跟踪处理,可以看出,在观测时间内能自动跟踪交叉目标,并能检测目标轨迹的起始和终止。
4 结论
本文提出了一种基于HMM多目标自动检测和跟踪的方法,仿真和海试数据处理结果表明,在多目标交叉等复杂情形下,该方法能有效地对多目标进行自动检测和跟踪,解决多目标相互交叉时目标跟踪易出现的错跟或跟丢问题,并能估计目标轨迹的起止时间。为了避免多目标轨迹同时存在时产生组合爆炸,本文对目标轨迹进行处理,消除轨迹间相互影响,但其计算量会随着目标数目增加而增加。
[1]李启虎.声呐信号处理引论[M].2版.北京:海洋出版社,2000.
[2]SHAPO B,BETHEL R E.An overview of the probability density function tracker[J].Proceeding of Oceans,2006,90(6):1-6.
[3]王忠,陈伏虎.基于阵元域数据的联合检测与跟踪算法[J].声学学报,2007,32(6):553-558.
[4]YOCOM B A,YUDICHAK T W,COUR B R.Bayesian passive sonar tracking in the presence of known interferers[C].12thInternational Conference on Information Fusion,2009:1821-1829.
[5]BRINKMANN K,HURKA J.A multi-target tracking approach for broadband passive sonar[C].UDT,2009.
[6]BELL K L,ZARNICH R E,WASYK R.MAP-PF wideband multitarget and colored noise tracking[C].IEEE International Conference on Acoustics,Speech,and Signal Processing,2010.
[7]BILLON D. HMM automatic detection and tracking for passive sonar[C].UDT Europe,2008.
[8]RABINER L R.A tutorial on hidden markov models and selected application in speech recognition[J].Proceedings of the IEEE,1989,77(2):257-286.
[9]MARANDA B H,FAWCETT J S.Detection and localization of weak targets by space time integration[J].IEEE Journal of Oceanic Engineering,1991,16(2):189-194.
[10]BETHEL R E,SHAPO B,KREUCHER C M.PDF target detection and tracking[J].Signal Processing,2010,90(6):2164-2176.
附 录
HMM的似然概率为:
HMM前向概率递推公式为:
HMM后向概率递推公式为:

因此
似然比为
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
哈尔滨轴承(2020年2期)2020-11-06
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
电子制作(2018年19期)2018-11-14
电子制作(2018年9期)2018-08-04
光学精密工程(2016年1期)2016-11-07
数学理论与应用(2016年3期)2016-05-17
核科学与工程(2015年3期)2015-09-26
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19