营养钵钵体分离系统设计
2017-01-18 07:34:55卢超平李宏
山西农经 2016年15期
□卢超 平李宏
(北京电子科技职业学院北京100176)
营养钵钵体分离系统设计
□卢超 平李宏
(北京电子科技职业学院北京100176)
营养钵质地多为塑料制作,广泛用于花卉、蔬菜、瓜果等农业种植。其成品为两个钵体对口连接在一起,呈椭圆形。其中钵体一般需要人工操作将钵体分离开,生产效率低,劳动强度大。本文根据营养钵生产工艺,设计了自动分离系统,并采用PLC对其进行控制,取消原本人工操作,提高效率,降低生产成本。有较好的应用前景。
营养钵;机械手;PLC
1 机械手设计
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。在现代生产过程中,机械手虽然还不如人手那样灵活,但它能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点。因此,机械手已受到许多部门的重视,并得到了广泛的应用。本系统也采用机械手进行生产设计如下。
营养钵本身质量较轻,刚生产出时,钵内充满气体,因此需要营养钵的机械手抓力合适,既要抓住钵体,又不能将其抓破。同时由于其生产速度太快,要求机械手动作快,能与之生产速度配合,因此在设计时需要考虑以上因素。
营养钵是两个钵体钵口相对连接在一起,呈椭圆形,如图1所示。因此,手爪外形以仿形字母V型结构,同时为了增加摩擦力,以及保护钵体,在手指末端需要增加保护垫。在分离的过程中需要模拟人工撕扯动作,因此需要配备成对的机械手,并能找准营养钵在合适的位置抓住营养钵两端,向两侧移动,完成撕拉动作,将营养钵分离。
图1 营养钵半成品外形
工业机械手的驱动系统,按动力源分为液压、气动和电动三大类。根据需要也可这三种基本类型组合成复合式的驱动系统。本系统为降低成本,同时由于钵体较轻,只需要很小的力量就可以分离,因此采用了气动方式。采用汽缸与之连接,完成伸手,抓钵体,缩回,分离钵体的动作。根据营养钵的生产速度,沿着营养钵传输线安装12对机械手。
2 传输系统设计
营养钵生产速率大约是120个/min,生产速度是很快的。因此进入分离工序需要通过传输机构将钵体传送到此环节。由于营养钵自重较轻,如果使用简单的传送方式,很容易在行进过程中丢失,因此需要在传输带两侧加装护栏,以防止钵体漂移。营养钵有不同的生产型号,为了适应不同型号大小的营养钵,护栏、机械手安装位置需要随之变动,以适应不同型号产品生产。在变更过程中,护栏、机械手移位要操作简单、尺寸精准。传输方式需要采用环形不停顿的传输方式,主要原因是因为钵体生产速度太快,而实际系统中不可能配备太多的机械手,为防止有漏掉的钵体,采用该传输方式,以保证后位空闲的机械手将其分离。同时由于机械手位置固定,因此需要钵体的位置能与之对应,所以在传输过程需要为之匹配定位系统,以保证机械手能准确的抓到营养钵。
3 机械手控制系统设计
本系统的工艺流程是,当传感器检测到营养钵时,对应位机械手伸出,抓住营养钵,收回机械手,顺势撕开营养钵。根据生产工艺流程可知,PLC输入信号包括:启动、停止,营养钵定位传感器,输出信号包括:传输带电机、汽缸电磁阀、手指电磁阀,工作指示灯。其中营养钵定位传感器,汽缸电磁阀、手指电磁阀为多个,在此仅以一个为例。在运行过程中需要认真计算好机械手动作时间和营养钵传送速度的关系,以保证机械手能准确抓住营养钵,且不会将其弄破。控制系统设计选用西门子S7-200型PLC,基本满足使用要求。其I/O分配如表1所示。
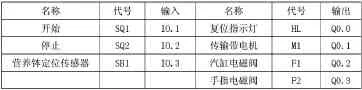
表1 I/O地址分配
结束语
本系统的难点在于机械手的动作与营养钵的运行速度匹配,否则会产生抓不到或是抓的位置不合适导致营养钵破裂等问题,需要精心计算,耐心测试。系统设计之初曾经尝试过使用真空吸盘方式替代机械手,但是由于钵体表面不够平滑,吸力不足等问题,修改了方案。本系统基本能够完成营养钵分离工作,可以省下大量的人力成本,系统所用部件稳定成熟,更换简便,在营养钵生产中能有较好的前景。
1004-7026(2016)15-0094-01
S223
A
10.16675/j.cnki.cn14-1065/f.2016.15.073
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
军民两用技术与产品(2022年4期)2022-06-28 02:03:04
舰船科学技术(2022年10期)2022-06-17 06:26:50
仪器仪表用户(2021年10期)2021-11-27 08:25:54
电脑知识与技术(2016年36期)2017-04-17 14:41:40
通信电源技术(2016年1期)2016-04-16 04:57:29
电测与仪表(2016年1期)2016-04-12 00:35:16
机电信息(2015年3期)2015-02-27 15:54:53
中国工程咨询(2015年11期)2015-02-14 06:08:50
中国交通信息化(2014年3期)2014-06-05 03:07:05