
立体仓库堆垛机取货装置研究
2017-01-18 05:48:06吕志军杨光辉黄东昕
物流技术 2016年11期
侯 瑞,吕志军,杨光辉,黄东昕
(1.东华大学 机械工程学院,上海 201620;2.上海精星物流设备工程有限公司,上海 201611)
立体仓库堆垛机取货装置研究
侯 瑞1,吕志军1,杨光辉2,黄东昕2
(1.东华大学 机械工程学院,上海 201620;2.上海精星物流设备工程有限公司,上海 201611)
利用有限元分析现有堆垛机取货装置的性能特点,并针对其取货效率低、噪声大等问题,提出一种新颖的柔性取货装置,极大地提高了取货效率,达到了工程应用的目的。对传统取货装置进行了静刚度计算并提出优化,对新装置的整体结构、伸缩臂结构和存取功能的实现做了具体介绍,为堆垛机的仓储作业重构及优化提供了新的技术手段。
立体仓库;取货装置;堆垛机
1 前言
巷道堆垛机是自动化立体仓库的核心物流设备,是随着立体仓库的出现而发展起来的专用起重机。巷道堆垛机的主要用途是在高层货架的巷道内来回穿梭运行,将放置在巷道口的货物存入指定的货格,或者从货格中取出需出库的货物运送到巷道口,从而实现物资的流动[1-2]。因此要实现物流的高效率,就要提高堆垛机存取速度,提高出入库频率。
然而,国内的堆垛机大多采用传统设计,以生产经验为基础,材料和能源消耗过多,振动大、噪音大、整机性能差[3]。本文为解决这些问题,达到敏捷、高效仓储作业的目的,研制出推拉式双货位取货方式及装置,可实现两侧不同尺寸货物的存取混合作业。
2 传统取货装置
2.1 单立柱堆垛机与货叉
上世纪60年代,在美国首先出现了巷道式堆垛机,随着立体自动化仓库的发展,巷道式堆垛机逐步取代了桥式起重机[4]。目前市场上最常见的是货叉式单立柱堆垛机,适用于存取托盘型货物,如图1、图2所示。堆垛机的货叉安装之后,结构尺寸固定,只能应用于某一规格的托盘及单元货物,无法实现存取不同尺寸的货物。货叉式堆垛机的作业方式是在货架巷道中来回穿梭,把货物从巷道口的出入库货台搬运到指定的货位中,或者是把需要取出的货物从其货位搬运到巷道口的出入库货台,堆垛机在巷道中的一次穿梭只能完成一个货物的存或取。此外,货叉自身结构较为沉重,进一步增加了载货台的负荷[5]。因此,快速发展的精益物流需要更加高效、灵活、稳定性好的仓储作业方式及装置。

图3 货叉力学模型

图1 单立柱巷道式堆垛机

图2 双深位货叉
2.2 货叉静刚度分析
2.2.1 货叉力学模型。传统双深位货叉是由四段叉体装配而成,如图2所示,从左至右分别是下叉梁,1级中叉梁,2级中叉梁和上叉梁。在存取第二深位货物时受力最恶劣,货叉易发生变形,其中二级货叉的刚性至关重要,直接影响了整体货叉的刚度。货叉刚度若达不到要求,将会影响堆垛机存取货物的正常工作。通过对货叉结构的分析及挠度的计算,可找出提高货叉刚度的方法。
根据堆垛机货叉的实际工作情况,并对计算工况适当简化,货叉受力图如图3所示,即为性能分析时货叉的力学模型。
2.2.2 货叉几何模型。为便于分析,在不影响计算结果的前提下,对货叉模型进行了适当的简化,忽略如圆角、倒角、直径较小的装配孔等对货叉强度刚度影响不大的几何特征。在ANSYS Workbench中导入货叉模型,并对货叉的材料进行定义。货叉材料定义为40cr,材料特性参数设置见表1。

表1 40cr材料特性
2.2.3 网格划分与边界约束。应用workbench中的自动划分网格法对几何模型进行网格划分。这种网格划分方法可以基于几何的复杂性,自动检测实体,对可以扫掠的实体采用扫掠方法划分六面体网格,对不能扫掠划分的实体采用协调分片算法划分四面体网格。货叉网格划分如图4所示。

图4 网格划分
根据上述货叉的力学模型对货叉添加约束如下:下叉梁底部固定,轴承与货叉各梁接触,设置货叉重力加速度为9 806.6mm/s2,并在上叉梁上表面加4 000N的载荷。边界约束如图5所示:

图5 边界约束
2.2.4 仿真结果。有限元仿真计算结束后,可以得到货叉的总变形和等效应力。
货叉的变形云图如图6,下叉梁和1级中叉梁基本没有变形,2级中叉梁及上叉梁发生的变形较大,说明2级中叉梁是整个货叉结构中最薄弱的环节,这与理论分析结果相一致。变形云图中显示货叉的最大变形量为41.583mm,最大变形发生在上叉梁的最前端。国外相同规格的货叉挠度一般控制在20mm左右,与国外相比,该货叉挠度是国外货叉挠度的一倍以上,远远超出许用的挠度范围,说明货叉没有达到设计要求,结构设计还需要进一步的改进。
货叉的应力云图如图7,最大应力为183.63Mpa,货叉最大应力发生在下叉梁上的滚轮滚子轴承上,小于其许用值785Mpa。
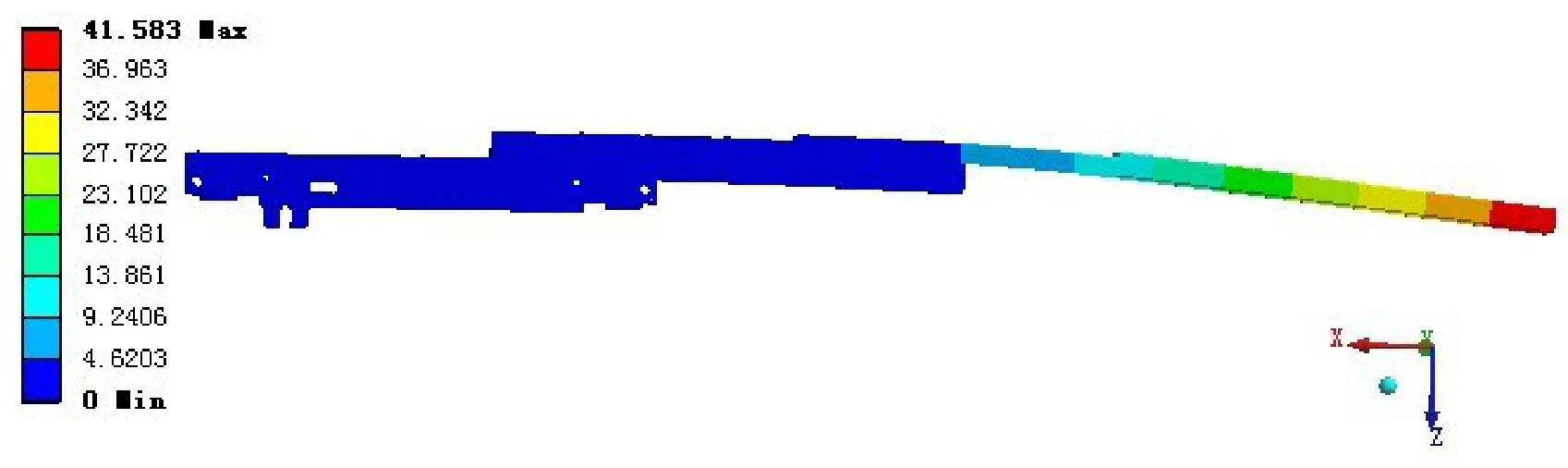
图6 货叉变形云图

图7 货叉应力云图
3 新型取货装置
3.1 装置结构介绍
3.1.1 整体结构。根据其结构及使用特点,新型取货装置被称为“柔性双货位取货装置”。与传统取货装置相比,该装置结构有了很大改观,如图8所示,其结构构件主要包括:四套伸缩臂、两块固定挡板、两块活动挡板、六套输送带、两套线性滑块以及十根导向杆。
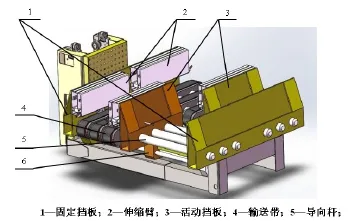
图8 柔性双货位载货台模型
在该结构中,四套伸缩臂分为两组,每组分别安装于固定挡板和活动挡板上,且每组中两套伸缩臂安装后需保证伸缩方向;两块活动挡板安装于线性滑块上,并沿各自导向杆移动,以配合伸缩臂实现夹抱运动;每套伸缩臂的两端各有一只勾爪,随伸缩臂一起运动以实现抽取运动;六套输送带每三套为一组,分别安装于固定挡板和活动挡板之间,以实现货物在载货台两侧货位之间的传动;每组输送带分别沿导向杆移动,底部利用X型交叉连杆实现输送带之间的同步分合。
3.1.2 伸缩臂结构设计。伸缩臂的工作原理为齿轮齿条组成的一种行程倍增机构[6],图9所示为齿轮齿条差动机构的示意图,该机构由一个滚动齿轮和两个齿条(固定齿条1和从动齿条2)组成。
根据相对运动原理,当滚动齿轮开始相对于固定齿条1滚动时,从动齿条2以滚动齿轮与固定齿条1的啮合点为速度瞬心,以滚动齿轮的运动方向为方向,以滚动齿轮中心速度的两倍为运动速度开始平行移动,即行程倍增机构。
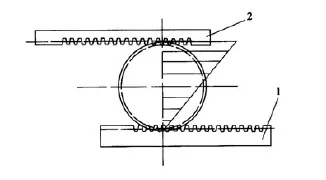
图9 齿轮齿条结构示意图
伸缩臂分内中外三层,中间板上安装有行程倍增机构的滚动齿轮,内板上安装固定齿条1,外板上安装从动齿条2,滚动齿轮分别与内、外板上安装的齿条进行配合,构成齿轮齿条组成的行程倍增机构,当电机驱动齿轮转动时,从动齿条2相对固定齿条1开始作平移运动,从而实现内外板相对线性移动,及伸缩臂的伸缩运动。伸缩臂的内中外三层之间利用梯形凹凸槽来配合,辅助内中外三层板实现相对线性移动,保证线性移动的平稳性。伸缩臂的结构如图10所示。

图10 伸缩臂结构示意图
在伸缩臂外板端部内侧,安装有勾爪,可实现伸缩与转动。勾爪的伸缩运动由外板内侧的冲压气缸来实现,旋转运动由勾爪尾部的旋转气缸来实现。当伸缩机械臂伸出时,勾爪也被气缸推出,达到最大行程时,被旋转气缸旋转一定角度,实现“勾”的动作,然后冲压气缸与伸缩臂开始同步收缩,实现“拉”的动作。
3.2 装置特点
3.2.1 柔性特点。所谓“柔性”是指结构可通过其部分或全部构件的形状发生变化而得到位移的一种性能[7]。柔性载货台具有独特的柔性。柔性载货台可以灵活支持各类尺寸的料箱、料盒和纸箱,实现对各类尺寸的单元货物的夹抱、推拉功能,且柔性载货台可实现双货位及双深位的货物取放功能,保证了堆垛机存取系统的灵活性和处理量。
3.2.2 双货位特点。与传统的货叉式堆垛机存取货方式不同,传统的货叉式堆垛机的载货台只能存或取一个单元货物,而柔性载货台上的存取货装置是双货位设计,如图11。两个货位不仅可以实现并行控制,同时存或取货物,而且可以实现一个单元货物在两个货位间的传输。

图11 柔性载货台俯视图
3.2.3 双伸位特点。柔性载货台具有双深位功能[8],且与传统的货叉式堆垛机的双深位功能不同。传统的双深位是由货叉实现的,货叉的工作原理为直线差动机构,再根据货物规格对货叉尺寸进行设计,使得货叉实现双深位功能;柔性载货台因双货位的设计,使伸缩臂的尺寸受到限制,所以伸缩臂的设计增加了勾爪来辅助伸缩臂实现双深位的功能。
3.2.4 混合作业特点。柔性载货台可以实现巷道两侧货架上不同规格箱式货物的混合存储作业[9],可以为堆垛机的路径优化提供一种新的优化方法。柔性载货台设计为双货位,且两个货位可以实现并行控制,即堆垛机在巷道中的一次穿梭可以同时完成两个货物的存或取,且两个货物可以是不同规格的箱式货物,这一特点为堆垛机的路径优化提供了一种新的思路。
3.2.5 夹抱功能。线性滑轨[10]在柔性载货台中的主要功能是通过固定挡板与伸缩臂配合使用,实现伸缩臂的臂间距调整。两幅线性滑轨分别固定安装于柔性载货台底架两侧的支架,两个货位的伸缩臂分别安装在固定挡板2及两对活动挡板上,如图12所示。固定挡板2安装在线性滑轨的固定端,两对伸缩臂中的固定臂均安装在固定挡板2上;固定挡板1安装于载货台底架的横梁,用于支撑活动挡板及输送带的导轨;两对活动挡板分别安装在线性滑轨的滑块上,可以随着滑块实现线性滑移;载货台的两对活动臂则安装在活动挡板上,可以通过线性滑块及六根导向杆实现与固定臂的相对线性往复运动,从而实现夹抱动作。
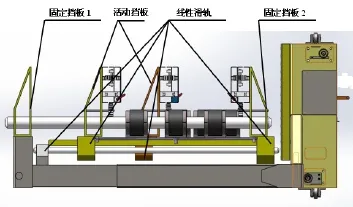
图12 柔性载货台侧视图
通过线性滑轨与伸缩臂的配合实现夹抱功能的设计原理是实现两对伸缩臂的相对线性往复运动,根据夹抱的这一工作原理,可拟定三种设计方案。
方案一:一对伸缩臂的两个伸缩臂均设计为活动臂。在堆垛机运行过程中,两对伸缩臂均随着线性滑轨的滑块及导向杆做直线往复运动,且在夹抱货物时,两对伸缩臂相向而行,如图13方案一所示的方向来夹紧货物。
方案二:一对伸缩臂中,一个伸缩臂为固定臂,另一臂为活动臂,且活动臂安装在载货台底架的横梁端。在堆垛机运行过程中,仅活动臂随着线性滑轨的滑块及导向杆做直线往复运动,夹抱货物时,活动臂的运动方向如图13方案二所示。
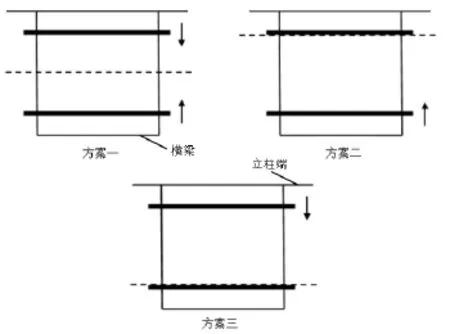
图13 夹抱结构方案图
方案三:一对伸缩臂中,一个伸缩臂为固定臂,另一臂为活动臂,且活动臂安装在载货台底架的立柱端。在堆垛机运行过程中,仅活动臂随着线性滑轨的滑块及导向杆做直线往复运动,夹抱货物时,活动臂的运动方向如图13方案三所示。
方案一两个伸缩臂均可活动,伸缩臂的控制较为复杂,对控制系统的要求较高,且精度难以保证;方案二与方案三较为相似,综合考虑了载货台的结构布局及取货装置的控制系统等因素,方案二更具优势。
3.2.6 同步功能。在伸缩臂夹抱的过程中,输送带、活动挡板和固定挡板三者之间会出现“分”和“合”两种状态。为了保证三者之间分合的同步性,如图14所示,在每个货位的三套输送带底部分别利用X型交叉连杆依次连接固定挡板、三套输送带、活动挡板。
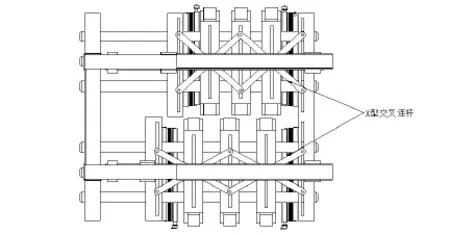
图14 交叉连杆结构示意图
3.2.7 可重构性。新型取货装置一般适用于小件及轻型料箱式货物的存取系统,而传统的货叉式堆垛机适用于重型货物的存取系统。因此,不能单纯的认为该装置可完全取代传统货叉式取货装置。为了该载货台上的存取货装置要实现与货叉之间的结构互换,需主要对载货台底架的尺寸进行调整以满足柔性载货台适用的货物规格需求[11]。
4 结论
本文对传统堆垛机取货装置进行了介绍和分析,并提出了适用于各类尺寸的料箱型货物以及小件的箱式货物的柔性载货台的设计。新型取货装置结构简单,重量轻,易拆装;伸缩臂稳定性好,工作噪音小。在结构方面,具有可重构性,能实现与传统货叉结构之间的互换。在功能方面,新型取货装置可以通过夹抱及勾取货物实现对货物的存取功能;双货位可以实现并行工作,存取或放置不同规格的料箱式货物,为堆垛机的仓储作业重构及优化提供了新的技术手段。
[1]孙军艳,曹西京,孙军帅.有轨巷道式堆垛机的动力学模型研究[J].噪声振动与控制,2007,4(2):33-36.
[2]刘昌祺,金跃跃.仓储系统设施设备选择及设计[M].北京:机械工业出版社,2010.
[3]赵利平,董良,张蕊,等.高速堆垛机模态实验研究[J].物流技术,2008,7(7):112-115.
[4]江宏.物流技术与装备的发展趋势[J].物流技术与应用, 2001,(6):36-39.
[5]程斌,杨毅,苟涛,等.特种堆垛机概述[J].物流技术与应用, 2013,18(3):108-110.
[6]方俊玉.齿轮齿条式行程倍增机构[J].常州工学院学报,1991, (4):33-37.
[7]徐勇.柔性设备上工艺装备的设计[J].现代车用动力,2002, (4):43-44.
[8]郝隆誉.双伸位堆垛机设计[J].物流技术与应用,2007,12(1): 98-99.
[9]庄葛巍,张晓颖,项旭杨.电能计量装置自动化检定系统混合作业方式的优化[J].科技展望,2015,(9):113-115.
[10]邹翠波,师鸿飞,张彩虹.线性滑轨的应用与安装技术[J]. Cad/cam与制造业信息化,2004,(4):88-90.
[11]王丽丽,李东升,曹珺雯,等.可重构柔性模具蒙皮包覆拉形仿真系统开发[J].锻压技术,2009,34(2):141-145.
Study on Retrieving Mechanism of Stackers in AS/RS
Hou Rui1,Lv Zhijun1,Yang Guanghui2,Huang Dongxin2
(1.School of Mechanical Engineering,Donghua University,Shanghai 201620; 2.Shanghai Jingxing Logistics Equipment&Engineering Co.,Ltd.,Shanghai 201611,China)
In this paper,we used the finite element process to analyze the performance and characteristics of the retrieving mechanism of the stacker and then in view of its problems such as low retrieving efficiency and excessive noise,etc.,proposed an innovative flexible retrieving mechanism with greatly enhanced retrieving efficiency to satisfy the demand of engineering application.Then we calculated and optimized the static stiffness of the traditional retrieving mechanism and introduced specifically the realization of the innovativemechanism.
AS/RS;retrieving mechanism;stacker
TH246
A
1005-152X(2016)11-0050-05
10.3969/j.issn.1005-152X.2016.11.012
2016-09-27
上海市自然科学基金项目(15ZR1400600);上海市科委标准建设项目(15DZ0500400);上海仓储物流设备工程技术研究中心项目(10dz2250800)
侯瑞(1992-),男,山东人,硕士生,研究方向:动态设计、钢结构。
猜你喜欢
商用汽车(2021年4期)2021-10-13 07:15:52
装备制造技术(2020年11期)2021-01-26 00:38:58
金属加工(冷加工)(2020年6期)2020-07-09 09:20:12
物流技术(2020年5期)2020-06-27 13:05:30
建材世界(2020年1期)2020-05-24 08:15:44
设备管理与维修(2020年15期)2020-02-15 19:32:47
计算机与数字工程(2018年11期)2018-11-28 09:47:00
电测与仪表(2016年13期)2016-04-11 11:23:34
管理现代化(2016年6期)2016-01-23 02:10:59
汽车科技(2015年1期)2015-02-28 12:14:37
