欧洲过渡性试验飞行器(IXV)电气总体架构设计
2017-01-16 01:14陈灿辉徐海运
计算机测量与控制 2016年12期
陈灿辉,徐海运,武 杰,王 骞,李 昊
(中国运载火箭技术研究院 研发中心, 北京 100076)
欧洲过渡性试验飞行器(IXV)电气总体架构设计
陈灿辉,徐海运,武 杰,王 骞,李 昊
(中国运载火箭技术研究院 研发中心, 北京 100076)
为飞行器设计一个合适可靠的电气系统是飞行器总体设计中的一项重要工作;IXV是一款欧洲重复使用运载器技术验证平台,并在2015年2月11日成功进行了飞行演示验证;在电气设计上,为降低成本并满足研制进度要求,IXV最大限度使用货架产品和经过飞行试验验证的产品进行系统设计,减少研发工作量;针对项目任务特点,甚少采用冗余特别是设备级冗余进行系统设计,只是在关键的供电电源和器上数据存储设备上进行了冗余设计;打破传统系统划分,设计统一的数据处理系统,集导航、控制、数据采集和处理为一体;整个电气系统以1553B总线、串口及以太网为基础进行接口设计,用以支持整个系统的数据交互并简化器地接口;IXV通过飞行试验验证了这些设计思路和方法的正确性与合理性。
IXV;航电;电气系统;架构
0 引言
航天运载器的重复使用是人类一直追求的目标,通过运载器硬件的多次重复使用,能像飞机那样进行常规操作,实现低成本、高可靠和高效率地进出空间。美国的航天飞机和X-37B飞行器是其中的典型代表。欧洲对重复使用运载器(RLV)的研制也高度重视,早在20世纪70年代就针对可重复使用天地往返运输系统开展了研究工作。1984年,英国航天部门提出了“霍托尔”(HOTOL)水平起飞的单级入轨可重复使用运载器方案。该方案采用一种新型的吸气式火箭发动机,它通过燃烧压缩空气而不是液氧,能够达到马赫数为5的飞行速度。1984年法国政府批准了一项利用阿里安5火箭发射使神号小型航天飞机的计划,并向欧洲空间局建议作为欧洲空间计划的一部分。1985年联邦德国提出了森格尔两级空天飞机的方案设想,并于1987年作为联邦德国的国家计划开始进行研究。
2015年2月11日,欧洲过渡性试验飞行器(IXV)首次飞行试验取得圆满成功[1]。此次飞行试验是新世纪以来继美国成功完成X-37B的三次轨道飞行试验之后,其他国家或联盟首次进行针对升力体式轨道再入返回关键技术开展的飞行演示验证试验,全世界对此次试验格外关注。IXV作为欧空局未来运载器准备计划(future launchers preparatory program, FLPP)的一个技术验证平台,是欧洲探索可重复使用技术的关键一环,也是欧洲发展可重复使用空天飞行器的一次成功验证,使欧洲走出了一条独特的可重复使用发展道路。IXV飞行试验成功验证了欧洲轨道再入领域的最先进技术,具有里程碑式的意义,对欧洲重复使用天地往返空天飞行器研制具有深远影响。IXV飞行器研制的成功,其研制方法和技术对重复使用天地往返飞行器的研制具有一定的借鉴性。本文针对IXV航电总体架构设计情况,对IXV研制过程中的先进技术方案和设计方法进行剖析,供相关工程设计人员参考。
1 IXV电气系统功能与架构
1.1 系统功能设计
电气系统是飞行器上所有电气设备的统称,是实现对全飞行器进行供配电控制、监测飞行器在研制和飞行试验各阶段各种性能、实现对飞行器进行各种控制(如遥控、程控等)的重要系统,对飞行器的各种控制均要通过电气设备才能最终得以实施。它是实现和完成对飞行器进行导航、制导、控制、遥测、遥控、供电、配电、信息传递和系统监测等任务的庞大而复杂的系统,传统上称之为电气系统,也称为航电系统。一般情况下,在飞行器系统配置上,它并不像结构、动力等系统一样是一个单独的系统,而是由多个分系统和设备组成,是飞行器整个电气设备的统称。该系统既可以实时监测飞行器飞行状态、在控制指令的作用下实现对飞行器进行控制,又可以在飞行器出现重大或致命故障需要自毁时实现自毁,还可以在飞行失败后,根据遥测得到的测量参数对飞行结果进行事后判读,分析失败原因,找出故障症结。
IXV是一种过渡性试验型再入飞行器,是欧空局构想的一个技术平台,是一种大气再入演示器,利用此平台向前跨越,从成功的大气再入演示器(ARD)设计迈向演示再入能力的实施[2-3]。IXV项目的主要目标是[2-3]:设计、研制、飞行验证一个自主的升力体布局,由气动控制的再入飞行器,并在系统级层面上完成主要技术的一体化。在这些关键技术中,重点包括用于研究气动热力学现象的先进的测量技术,不同的热防护与热结构技术,先进的制导、导航和由姿控发动机与气动面联合执行的飞行控制技术。通过飞行试验,验证低地球轨道飞行、再入段和下贱溅落段飞行所经历的力、热环境,以及考核制导导航、控制、航电和遥测等关键的再入技术。
根据项目研制任务,IXV飞行器航电系统确定了如下主要功能:
1)实现对全飞行器的供配电;
2)发射前,对全飞行器状态、接口、时序等进行测量、检查;
3)飞行中,测量、记录、发送飞行器飞行中的性能参数;
4)监测飞行器各分系统工作状态;
5)根据控制指令,实现对飞行器的导航、制导与控制。
1.2 系统架构设计
根据系统需求,IXV开展了电气系统架构设计,并根据不同任务,配置了相应的分系统。在电气总体架构设计上,IXV飞行器设计的基本思路是:在满足系统功能、性能的前提下,结构简单,研制周期与项目任务相匹配,开发成本尽量低。在此原则下,IXV电气系统总体设计采用了基于商业成品(COTS)的设计思路并采用一体化、集成化设计,采用统一供配电方式。除IMU外,所有部件设计为28 V DC供电工作,取消了早期设计的DC/DC变换器,大大减少了设备数量,同时也降低了设备热载荷,有利于热控系统设计[4]。图1示出了IXV飞行器航电体系架构图[2-3]。

图1 IXV电气系统架构
2 IXV电气系统思路分析
通过对IXV电气系统配置及设计情况的分析,可梳理出其基本的一些设计思路:
1)电气总体设计与整个项目总的设计理念和思路密切相关,需要从整个项目的研制角度和需要出发开展电气总体设计,并贯穿于各分系统研制中。在IXV研制上,在进行电气系统设计时,根据项目研制周期、经费及任务需要,确立了基本设计原则,即在满足系统功能、性能的前提下,结构简单,并在此基础上完成了电气总体架构设计,确立了基本设计框架。在电气各分系统研制中,也贯彻了该研制思路。例如,在设计上,基本采用串行设计思路,甚少采用冗余特别是设备级冗余进行系统设计,只是在关键的供电电源和器上数据存储设备(IXV为技术验证飞行器,收集各项数据是其主要任务使命之一)设计上配置了双冗余设备。这就是说,在飞行器项目研制过程中,必须从项目顶层需要出发开展电气总体设计,并以此指导、牵引分系统开展系统研制,不要见到单点就害怕,为了冗余而冗余,而要结合项目特点和任务开展分析和设计。
2)电气系统设计集成化、一体化。在IXV电气分系统配置上,除了专业性较强或较为特殊的电源、射频天线、测量传感器等配置了相应的电源系统、遥测跟踪系统、测量系统外,在硬件上,并不像其他卫星那样配置GNC系统、数据管理系统等,而是统一设计为数据处理系统,集导航、控制、数据采集和处理为一体,采用高可靠计算机技术进行集成化设计,打破了传统研制分工模式,从系统顶层规划,采用集成化、一体化思路完成电气系统研制。
3)全飞行器所有射频部分统一设计,充分发挥专业特长。IXV遥测跟踪系统其实就是由全飞行器所有天线、发射机等射频部分组成的一个系统。虽然从信息关系上来看,组成该系统的三部分相互之间并没有接口关系,但IXV还是将他们归为一个系统,这样,就能充分发挥射频研制部门技术优势,确保各部分间的相容性。另外,IXV要实现高速再入飞行,飞行器表面有一层较厚的热防护层,在射频天线研制时,需要综合开展相应设计,将所有射频天线归为一个系统,可以实现技术、试验等方面的共用,降低研制成本,缩短研制周期。
4)采用以太网实现飞行器与地面进行通信。IXV设计时,统一配置了电气地面支持设备(EGSE),用于飞行器各阶段的测试。EGSE与飞行器的接口设计上,通过脐带电缆的接口除了常规的地面电源供电接口、母线电压监测接口、器载计算机通信串口和测量参数LVDS接口外,还采用以太网实现与地面间的通信(脐带电缆中没有1553B接口),这种方式,值得借鉴。
3 IXV系统配置分析
3.1 总体设计
IXV整个电气系统以LEON2-FT微处理器为核心[7]、以1553B总线为基础、以一系列串口和以太网为支撑进行构建[2],有400余个传感器(含常规传感器和先进传感器)用于飞行性能参数采集,所有接口的选择与设计以满足整个飞行器测试数据的可靠传输为前提。
为了确保整个系统的可靠性,在结构简单的原则下,IXV从系统层面出发,设计了局部冗余(如电池)和功能冗余(如部分试验数据既存储在大容量存储器中,同时也通过遥测下传)[2]。
在进行航电总体设计时,IXV从任务目的出发,将整个电气系统分为两层,即功能层和试验层,并针对各自特点开展设计。
功能层负责GNC任务,记录功能层遥测(包括GNC遥测、飞行器健康状态),并采用双冗余飞行记录仪记录功能层遥测。功能层以1553B总线为基础,由器载计算机(OBC)、IMU、GPS接收机、数据采集装置(DAU)以及24 Gbyte的飞行记录仪等组成[3]。
试验层负责飞行试验数据(IFE)的管理。该层以简单高效为设计原则,基于有限状态机制通过传感器进行数据的采集。测量传感器类型包括压力、温度、应变、位移、加速度以及红外摄像机。与功能层类似,试验层也采用先存储然后通过事后回放的方式来应对测控覆盖区域外飞行。考虑到IXV为试验型飞行器,进行试验数据采集是其主要目的之一,因此,它采用双冗余试验记录仪对器上数据流进行存储[3]。
飞行器配置有信标链,由2个冗余的信标和一个独立的电源组成,可在主系统失效时确保信标的功能,确保方便的进行飞行器的搜寻。
在系统组成上,IXV航电系统主要设计了数据处理分系统(DHS)、电源分系统(EPS)、遥测跟踪分系统(RTC)、测量分系统。为了实现对飞行器的测试,地面配置了电气地面支持设备(EGSE)。
3.2 电源分系统设计
IXV飞行器全程采用蓄电池组进行供电,全器采用统一供配电体制。针对不同的用电需求,飞行器上设置了多台蓄电池组,2台28 V蓄电池组为器上电气设备供电,2台冗余的火工品电池组为火工品为各火工品及电爆阀等供电。另外,针对襟翼控制系统,配置了体襟翼蓄电池组[3]。
电源分系统还设置了1台配电器,电源母线电压为28 V,为了保证供电的高可靠性,设计中,借鉴了其他航天项目(如GAIA、Sentinel-1或ATV)的研制经验[2-3]。为了实现蓄电池组的开关控制以及系统状态监测(包括约束状态监测和总线电压监测等),在电源分系统与EGSE间设置了相应接口。
考虑到地面测试及检测的便利性,IXV在进行火工品电路设计时,在飞行器表面便于操作的地方设计了功能复用的表面电连接器。一方面,在飞行过程中,通过这些电连接器实现各火工品、电爆阀等与火工品控制电路相连,用于对火工品的起爆控制等。另一方面,在地面,可通过这些电连接器进行火工品的短路保护和回路的测试。第三,在地面测试时,还可通过这些电连接器连接火工品等效器等装置,完成全器测试。
3.3 遥测跟踪分系统设计
遥测跟踪系统用于实现飞行器测量参数的下传,遥测下行速率为1 Mbps,同时,还实现GPS卫星接收功能。它主要由三部分组成:
1)飞行器功能参数传输模块,主要包括发射机、功分器以及发射天线,它通过RS422与器载计算机(OBC)相连;
2)飞行器试验测量参数传输模块,由发射机、功分器以及发射天线组成,它通过RS422接收数据采集装置参数;
3)GPS射频模块,包括GPS接收天线与低噪放,它通过射频电缆与GPS接收机相连。
遥测跟踪系统结构组成及对外接口关系如图2所示。
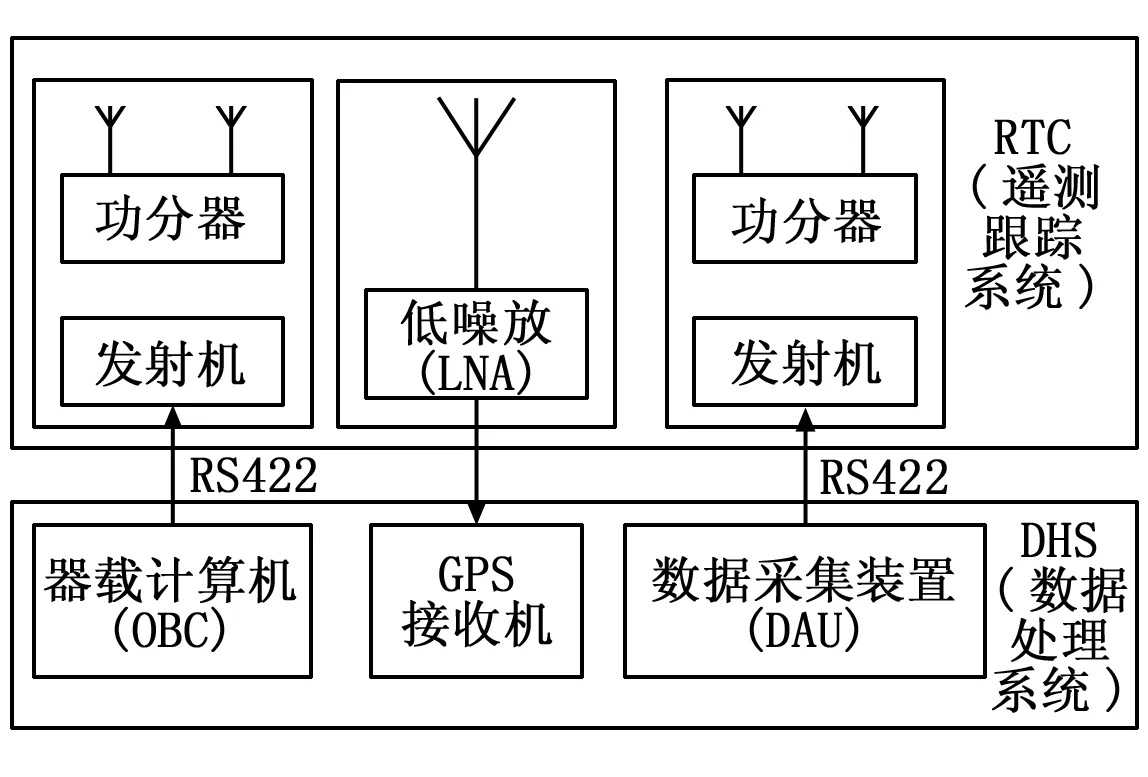
图2 遥测跟踪系统结构组成
从IXV整个电气系统设计来看,虽然从信息关系上来看,这三部分相互之间并没有接口关系,但在系统划分,不管是遥测天线还是GPS接收天线,器上所有天线均划归遥测跟踪分系统,由该系统统一配置与设计,充分发挥射频研制部门技术优势。
3.4 数据处理分系统设计
数据处理分系统是整个飞行器的控制核心和数据采集中心,实现对飞行器的控制和试验数据的采集和处理。该系统以器载计算机(OBC)为核心,并配有飞行参数记录仪和试验数据记录仪,用于存储飞行器测量和试验数据。该分系统还包括GPS接收机、IMU、数据处理单元(DHU)、数据采集装置(DAU)、飞行记录仪、试验记录仪等设备。
数据处理系统负责对功能层遥测和试验层数据的采集、存储、记录和传输(含实时传输和延时发送)。通过下行链路将收集到的飞行器功能层和试验层数据传回地面。试验层和功能层均配置数据采集装置[2]。
由图2可见,数据处理分系统与遥测跟踪分系统间采用RS422进行遥测参数传输,遥测跟踪分系统采用两套相互独立的数据链分别传输功能层和试验层遥测参数。
需要特别说明的是,IXV在系统配置上,并没有在硬件上设置单独的GNC分系统,其主要设备如器载计算机、导航敏感器归属于数据处理分系统,而GPS天线及低噪放划归于遥测跟踪系统,作动器(舵机)及机电作动器控制装置归属于襟翼控制系统。图3给出了GNC相关的硬件(敏感器、作动器与器载计算机等)及主要接口关系[2-3]。

图3 GNC相关硬件和接口关系图
数据处理分系统与电气地面支持设备(EGSE)间设计有相应接口,用于地面测试时使用,主要接口类型包括以太网、1553B,与器载计算机遥测模块间的同步LVDS(数据+时钟信号)、与数据获取装置控制逻辑模块间的同步LVDS(数据+时钟信号),以及异步通信接口和部分离散量接口等。
3.5 测量分系统设计
IXV飞行测量(IFM)计划的主要作用就是按照飞行试验(IFE)计划描述和规定的各种科研目标和要求进行测量[5]。IXV是一种过渡性试验飞行器,获取飞行中的各项试验数据是其重要目的之一,因此,在IXV飞行器上配置了大量传感器用于测量飞行器各性能参数,IXV测量分系统即是由各类传感器所组成的系统。
IXV测量分系统主要是指各类传感器,包括常规传感器(常规测量系统)和先进传感器(先进测量系统)[5-6]。先进测量传感器主要包括高温计、分光仪、红外成像仪、表面摩擦传感器、组合式压力通量探头等。常规测量传感器主要包括热电偶、压力传感器、应变计、位移传感器、热通量传感器等。
对于先进测量传感器,所应用的试验一般需要由不同的子组件(如热、冷机械接口)构成的复杂仪器组件,还需使用可获取和调节信息的专门电子装置。在各先进试验的具体设计中,指定专门的试验设计者,负责收集初步信息和可行的设计[5-6]。
对于常规测量传感器,测量仪器主要为商业成熟产品,这些元件与项目要求的兼容性已通过验证,主要问题是关于如何从力学和电学的角度将其集成到IXV飞行器上。选择常规传感器的基本原则是,在满足主要技术指标要求的前提下,优选经过飞行试验验证的、质量和尺寸尽可能小的产品[5-6]。
4 结束语
为降低成本并满足研制进度要求,IXV最大限度使用货架产品和经过飞行试验验证的产品进行系统设计,减少研发工作量。针对项目任务特点,甚少采用冗余特别是设备级冗余进行系统设计,只是在关键的供电电源和器上数据存储设备上进行了冗余设计;打破传统系统划分,设计统一的数据处理系统,集导航、控制、数据采集和处理为一体,采用集成化、一体化完成整个电气系统的设计;采用1553B总线、串口、以太网等进行全飞行器各系统间接口设计,实现与地面间的通信,简化接口界面及器地接口。IXV通过飞行试验验证了这些设计思路和方法的正确性与合理性,其设计思路与方法值得借鉴。
[2] Zaccagnino E, Malucchi G, Marco V, et al. Intermediate experimental vehicle (IXV), the ESA reentry demonstrator [A]. AIAA Guidance, Navigation, and Control Conference[C]. Portland, Oregon. AIAA,2011.
[3] Malucchi G, Zaccagnino E, Drocco A, et al. The European re-entry program, from IXV to ISV-GNC/avionics development status and challenges[A]. AIAA Guidance, Navigation, and Control (GNC) Conference[C]. Boston, MA. AIAA,2013.
[4] Loddoni G, Signorelli M T, et al. IXV adaptation to vehicle reconfiguration[A]. 40th International Conference on Environmental Systems[C]. AIAA 2010-6088.
[5] Cosson E, Giusto S, Del Vecchio A, et al. Overview of the in-flight experimentations and measurements on the IXV Experimental Vehicle[A]. 2nd ARA Days-Arcachon, 2008[C].2008:21-23.
[6] Pereira C, Walz S, Rufolo G, et al. In flight experimentation for The IXV Re-entry Vehicle: objectives, experiment design and implementation [C]. IAC-12-D2.6.3, 2012.
[7] Preud’homme F, Dussy S, Fleurinck N, et al. A high reliability computer for autonomous missions, demonstrated on the ESA IXV flight[A]. 66th International Astronautical Congress[C]. Jerusalem Israel. IAC-15-D2.6.5, 2015.
Avionics Architecture Design of European Intermediate eXperimental Vehicle (IXV)
Chen Canhui,Xu Haiyun,Wu Jie,Wang Qian,Li Hao
(R&D Center, China Academy of Launch Vehicle Technology, Beijing 100076, China)
Designing correct and reliable avionics architecture of a spacecraft is a complex endeavor. The Intermediate eXperimental Vehicle (IXV) is the European Space Agency (ESA) technology platform conceived as the step forward from the successful Atmospheric Re-entry demonstrator (ARD) to demonstrate re-entry capabilities, which was successfully launched and flight on February 11th2015. In order to reduce the development cost and ensure the schedule, the Commercial Off-The-Shelf (COTS) equipments and the confirmed equipments by flight were selected as best as possible in the avionics design. And the redundant design was very little except the critical equipments such as batteries and storage recorders. The engineer break up the tradition mode and design a novel data handling subsystem (DHS), the subsystem has been designed to integrate some functions such as the navigation, control, data acquisition and handle and so on. The avionics is designed around a 1553 MIL Bus and a series of serial and Ethernet interfaces. These interfaces were selected with the purpose of sustaining the amount of data exchanged throughout the system and predigesting the Electrical Ground Support Equipment (EGSE) interface. The validity and rationality of the IXV’s electric system were validated by the maiden flight.
IXV; avionics; electric system; architecture
2016-06-14;
2016-07-18。
陈灿辉(1973-),男, 湖南汨罗人, 博士, 主要从事电气系统设计方向的研究。
1671-4598(2016)12-0223-04
10.16526/j.cnki.11-4762/tp.2016.12.065
V442
A
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
电子制作(2019年7期)2019-04-25
电子制作(2018年2期)2018-04-18
广西电力(2016年5期)2016-07-10
现代工业经济和信息化(2016年6期)2016-05-17
小朋友·快乐手工(2015年5期)2015-06-06
湖州师范学院学报(2015年4期)2015-03-11