船载USB系统偏馈信号动态控制的设计与实现
2017-01-16 01:14朱昱铭
计算机测量与控制 2016年12期
何 谦, 程 刚,王 潇,刘 帅,朱昱铭
(中国卫星海上测控部,江苏 江阴 214431)
船载USB系统偏馈信号动态控制的设计与实现
何 谦, 程 刚,王 潇,刘 帅,朱昱铭
(中国卫星海上测控部,江苏 江阴 214431)
通常采用对前桅方式接收转发机的射频信号进行相关指标测试或系统无线联试,此种方式需要多岗位配合且USB固态功放发射功率有可能导致S频段导航雷达受到干扰;通过研究数控衰减器在单片机控制系统中的应用,设计了船载USB系统偏馈信号动态控制系统,可实现雷达天线在对冷空的情况下接收静态或动态变化的偏馈射频信号,进而分析对系统跟踪性能的影响;该系统经过数次海上测控任务的检验,证明其操作方便快捷、运行稳定可靠,达到了充分检验设备性能、提高任务准备效率的目的。
航天测量船;测控系统;偏馈信号;动态控制
0 引言
船载USB系统通常对前桅喇叭进行相关指标测试或系统无线联试,通过前桅喇叭天线连接标校机房的可调衰减器人工手动调整实现射频信号在空间辐射的强弱变化,以达到相关指标测试或联试时所需要的门限信噪比。采用该种方式需要伺服操作手操作雷达天线对准前桅电标,而且构建系统无线方式时发射机发射的功率可能干扰S波段导航雷达正常工作。为增加标校手段,通常借助主天线和偏馈振子构成无线射频闭环,可以实时、精确测定船载雷达的距离零值,从而实现无塔零值标校[1]。也可利用偏馈振子作为跟踪通道的校准源调整雷达跟踪和通道/差通道间的相移,完成跟踪接收机的无塔校相[2]。
本文设计了船载USB系统偏馈信号动态控制系统,可实现无需转动天线即可自动或手动调整接收射频信号幅度的变化,满足相关指标的测试需求或系统联试的需要;也可模拟目标信号大范围动态衰落导致系统误码率增大的情况,为分析和判断设备状态提供了有效的检验手段。
1 偏馈信号动态控制的构建
在S波段雷达天线主反射面适当位置安装一偏馈振子,作为旋转抛物面上的一个点,其接收电磁波行程相等,因而电波均为同相,安装位置需要考虑不改变设备原有的任务状态和信号通路,不影响天线主辐射方向图,减少多径效应对信号电平的影响,不降低设备的性能指标[3]。当高功率放大器辐射出已调制的上行电波信号后,偏馈振子接收信号并通过信号线缆和环形器把接收到的信号送至中心体校零变频器,中心体校零变频器按一定的转发比进行频率的变换输出,输出信号经过研发的动态信号控制系统后,再经过环形器和信号线缆传输到偏馈振子进行信号空间辐射,副反射面将部分信号反射进入雷达馈源系统,然后再送至高频接收信道放大变频后送综合基带终端进行信号的解调处理或送给角跟踪接收机进行和差通道的相位调整。图1为USB系统无线偏馈射频信号环境构建图。

图1 无线偏馈射频信号环境构建图
2 动态控制系统设计
USB系统偏馈射频信号动态控制系统主要由系统监控台工控机、控制模块及外围电路、串口服务器和网络交换机组成。系统的上位机依托于USB系统监控台和与之配套的远程控制软件实现,通过软件界面手动设置静态衰减数值,或读取事先制作的动态控制文件以需要的时间间隔对数控衰减器的衰减量进行增减控制;而下位机与偏馈校零变频器共同位于天线背部支架的中心体内,采用单片机最小系统、数控衰减器及其外围电路组成控制模块,根据远程发送的数值实现对偏馈校零变频器所发射信号强度的增减控制。
2.1 信息传输路径
偏馈信号动态控制信息传输链路复杂,传输距离较远,必须利用USB系统现有连接关系进行信息传输研究。为便于系统联网管理、IP化数据管理和存取,系统监控台对下位机及偏馈校零变频器的远程控制信息首先以RJ45网线方式发送至高频接收机房,然后在跟踪机柜下行开关控制插箱内部借助MOXA公司的DE-211串口联网服务器,完成TCP/IP网络信息与RS-422异步通讯串口信息的转换,实现网络与串口的数据双向透明传输。RS-422异步通讯信息经过雷达天线内部的方位转接板、低频滑环、俯仰转接板、俯仰旋转关节才能将上位机的控制信息传送到中心体的动态控制系统,并实现对偏馈校零变频器的信号幅度控制。同理偏馈校零变频器的反馈信息采用逆向传输路径完成信息的上报和显示。图2为控制信号传输路径的连接框图。
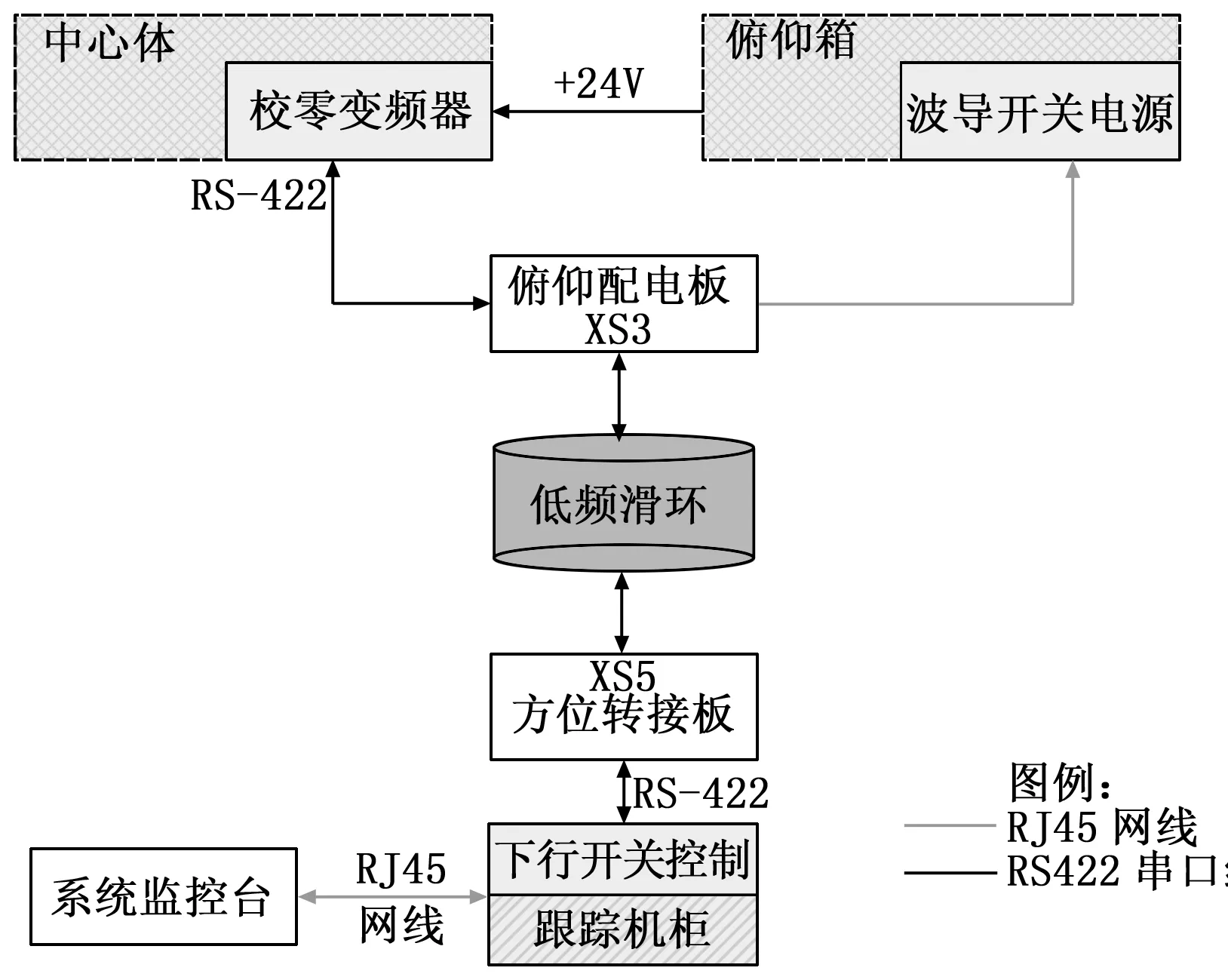
图2 控制信号传输路径的转接框图
DE-211串口联网服务器通过其内置的以太网TCP/IP协议和系统监控台进行交换数据,使用前必须设置DE-211的IP地址和网关等参数,同时也要为系统监控台设置相应的IP和网关,使两者处于同一个监控网网段,这样两者就可以通过以太网传输协议交换数据,提高了数据传输速率和安全性。RS-422异步通讯串口采用差模传输,抗干扰信号能力强,最大传输距离高达1200米,最大传输速率为10 Mb/s,其四线接口可以采用单独的发送和接收通道,在经过低频滑环多路拥挤信号的路径下提高了系统传输的可靠性,非常适合多状态远距离传输。传输路径中的关键环节是将RS-422异步通讯信息的控制及反馈信息利用天线低频滑环的电刷进行信号传递,避免了串口线缆被天线卷绕的缺陷[4]。
综上考虑,偏馈射频信号动态控制系统采用RS-232串口实现对单片机近距离的高效实时控制,而采用RS-422总线完成控制信号从天线中心体到高频接收机房的远距离传输。
2.2 数控衰减器的选型
根据系统设计指标要求,USB偏馈信号动态控制系统中的数控衰减器,所需要的衰减量为60 dB,采用6位数控衰减器,可以实现最大26-1=63 dB的衰减量。而且数控衰减器在改变衰减量时,必然会对接收通道的信号相位一致性及增益一致性产生一定影响,所以要使衰减器改变数值时系统状态稳定,需严控配置数控衰减器的相位变化和衰减精度。具体指标如下:1)衰减精度:≤±0.3 dB;2)各衰减状态相位一致性:≤±0.2°;3)相位稳定性:全温范围≤1°;4)驻波比:≤1:1.5;5)衰减平坦度:带宽内≤0.5 dB。
综合考虑市场,采用亚光电子VJBS1122数控衰减器,该型衰减器采用微型真空继电器和贴片电阻网络级联而成,一般用于信号源与负载之间调节信号输出的强度,防止负载电路过载。可通过单片机采用TTL电平对其衰减量的增减进行高速数控,并且相位恒定、衰减精度高,具有适用面广,使用更方便等特点。
2.3 控制模块硬件电路设计
控制模块包括交直流电源、亚光电子VJBS1122数控衰减器、深圳宏晶科技有限公司的STC89C52RC单片机以及51系列单片机最小系统等部分,其内部结构如图3所示。控制模块中单片机STC89C52RC是整个电路中最核心的元件,可以精确控制数控衰减器数值,并进行相关电平的转换。该单片机控制引脚及指令代码完全兼容传统80C51单片机,具有串行口编程功能,是一种易编程、低功耗、高性能、抗干扰的CMOS8位微控制器[5]。单片机最小控制系统是基于RS-232串口完成数据信息的交换,为提升系统可靠性和适应远距离传输,在控制模块内部将RS-232串行接口利用NPORT 5110转换卡转换为适合于远距离传输通信的RS-422串行接口标准。

图3 控制模块结构图
由于单片机控制系统采用RS-232串口电平,而STC89C52RC单片机工作在TTL电平,因此需采用MAX232转换芯片进行电平转换。该转换芯片可以把输入的+5 V电源变换成RS-232C 输出电平所需±12 V 电压,只需配5个0.1 μF的电容即可完成电平转换,转换后的串行信号直接与单片机连接。为保证单片机的运行速度和所有指令能得以有效执行,系统选用11.059 2 MHz的外部晶振产生固定[4]的时钟周期。根据上述元器件的选择,其硬件接口电路设计如图4所示。

图4 STC89C52RC的外部连接图
2.4 监控信息帧格式
一般监控信息帧由系统监控台发出,偏馈信号动态控制系统负责接收并以适当的接收间隔返回响应帧,不应引起设备通讯出错或丢失通讯信息。监控信息帧格式见表1。
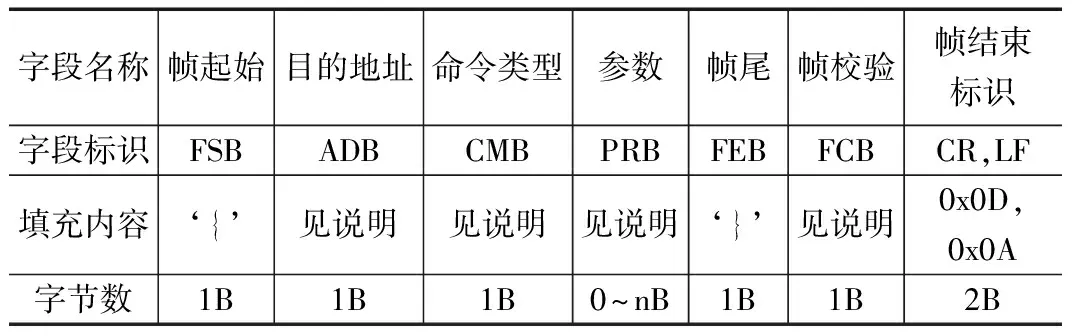
表1 监控信息帧格式
ADB:目的地址段(1字节),规定在30 H~5 FH之间;CMB:命令字段(1字节),规定在30 H~5 FH之间;PRB:参数字段(0~n字节),规定在20 H~5 FH之间。
2.5 控制软件的设计与实现
系统监控台软件集成开发环境选用Borland C++ Bulider 6.0,采用C/S软件编程结构,同时采用面向对象的编程方法。系统监控软件基于CORBA体系分为服务端和客户端两个软件,服务端软件主要完成下位机数据的分析和底层数据处理,监控客户端软件主要完成校零变频器及控制模块的参数控制及状态监视。通过CORBA接口与监控服务端软件和数据库服务软件之间进行信息交互。
上位机程序采用系统监控台的客户端软件进行功能扩展而成,嵌入到系统监控台软件中,与原系统监控台共用服务端程序,既可实现对数控衰减器的精确控制,又可以采集控制校零变频器的工作状态。可以充分利用系统监控台的固有资源,从而有效降低软件开发成本,增强软件的维护性,并扩大软件的适应性范围。其主要功能是可静态设置数控衰减器数值或动态调用控制文件实现数控衰减器的控制,而调用控制文件控制可调用预先准备好的*.txt文件进行控制[6]。其主程序流程如图5所示。
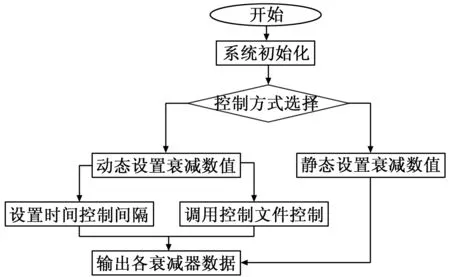
图5 主程序流程图
控制软件程序界面如图6所示。“文件编号选择”选项框有4个选项,每个选项对应目录中的一个配置文件ZRTConfig,可根据需要提前准备1~4个配置文件,以便随时调用。“间隔时间”选项框中间隔时间从1~10 s,表示每隔一个“间隔时间”,系统监控软件向偏馈校零变频器发送一条衰减数值参数控制命令。点击“开始”按钮以后,系统监控软件首先从硬盘指定目录下读取选择的配置文件,然后定时向偏馈校零变频器发送一条参数控制命令,如果不按其它按钮,需要等到配置文件中的参数依次发送完毕以后,才会停止向校零变频器发送命令。如果系统监控软件没有正在向校零变频器发送“停止”按钮命令,此按钮为灰色,即点击无效。此按钮为可点击状态时,点击“停止”按钮可以终止向校零变频器发送参数控制命令,如果想继续发送控制命令,需要重新点击“开始”,按照配置文件中衰减量的顺序依次发送参数控制命令。点击“暂停”按钮可以使系统监控软件暂停向校零变频器发送参数控制命令,此时软件会记住当前衰减量在控制文件中的位置,等待点击“继续”按钮以后,从该位置继续往下读取衰减量。
图6 软件程序界面图
3 偏馈信号的动态测试
根据系统设计要求,构建船载测控雷达系统无线偏馈射频链路,对射频信号进行动态衰减控制测试。综合基带采用FM遥测模拟源作为上行激励信号模拟遥测误码率测试,并对接收信号进行数据记盘,系统监控台读取的控制文件采用简单的1 dB步进,每秒发送一次控制命令。其中高频发射机分别对天线上功率20 W,50 W,100 W。当高频发射机对天线上功率100 W时,数控衰减器经过24 s(即经过24 dB)的变化后,综合基带已出现失锁现象,见图7的局部放大图。
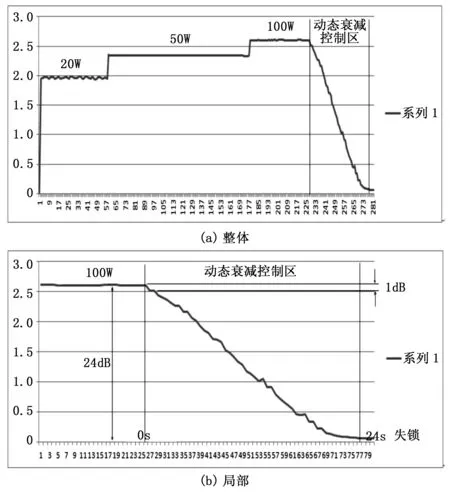
图7 无线偏馈射频信号变化情况
4 结束语
本文所设计实现的USB系统偏馈信号动态控制系统,选用51系列单片机及高精度数控衰减器作为整个系统的核心,以控制偏馈射频信号的强弱,具有控制精度高、自动化程度高的特点,既可以实现系统监控台远程设置静态衰减值,也可以根据制作的控制文件设置动态衰减值,实现系统联试时射频无线信号的动态变化,检验了设备对动态信号的适应能力。该系统经过多次海上测控任务的检验,证明其方法科学有效、操作方便快捷、运行稳定可靠,达到了充分检验设备性能、提高任务准备效率的目的。
[1] 侯 辉,周 江,伍德勇.船载USB距离零值标校数据分析[J].电讯技术,2004,4:166-170.
[2] 杨福涛,冯炳煊.利用偏馈振子调整测控雷达跟踪通道相移技术研究[J].遥测遥控,2001,22(6):30-34.
[3] 董建伟,高长生,熊 伟,等.脉冲测量雷达无塔标校系统设计[J].计算机测量与控制,2013,21(3):685-686.
[4] 何 谦,徐 耀,程 刚,等.雷达中心体温湿度监测系统的设计与实现[J].电子设计工程,2013,21(15):95-98.
[5] 蔡礼田,逢 博,邱 政,等.基于STC89C52RC的雷达模拟器数字键盘设计[J].电子测试,2011,10:55-57.
[6] 何 谦,吴有杏,李仁龙.扩频多目标信号动态模拟系统的设计与实现[J].计算机测量与控制,2014,22(6):1908-1910.
Design and Implementation of Dynamic Signal Control in Offset Dipole on Shipboard USB System
He Qian,Cheng Gang,Wang Xiao,Liu Shuai,Zhu Yuming
(China Satellite Maritime Tracking and Controlling Department, Jiangyin 214431,China)
Usually, it can receive the RF signal transmitted by converter to achieve certain testing and wireless joint debugging for antenna pointing to the fore mast. It needs to cooperation for multi-system and causes the interference for S-band navigation radar by USB solid state power amplifier. By the study on MCU control system with numerical control attenuator, the paper designs a dynamic control system in offset dipole on shipboard USB system. It can achieve static or dynamic RF signals in offset dipole by radar antenna pointing to the sky, help to analysis effects of the tracking performance in the system. Since the system has been verified in maritime track and control tasks, it is proved that the operation is convenient and rapid, and the working is stable and reliable. With this system, the performance of equipments can be tested sufficiently and the efficiency of preparing tasks can also be improved.
measurement ship; TT&C; offset dipole signal; dynamic control
2016-05-06;
2016-07-05。
何 谦(1978-),男,陕西合阳人,高级工程师,主要从事航天测控雷达信号处理与标校方向的研究。
1671-4598(2016)12-0093-03
10.16526/j.cnki.11-4762/tp.2016.12.026
TN955
A
猜你喜欢
上海计量测试(2022年2期)2022-08-30
电子测试(2022年11期)2022-07-18
电子设计工程(2022年5期)2022-03-15
装备制造技术(2020年11期)2021-01-26
防爆电机(2020年3期)2020-11-06
测控技术(2018年5期)2018-12-09
电子制作(2017年7期)2017-06-05
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
地矿测绘(2015年3期)2015-12-22