基于自抗扰的微电网下垂控制
2017-01-16 12:09薛阳时宇飞阚东跃陈明超张茂胜
电网与清洁能源 2016年11期
薛阳,时宇飞,阚东跃,陈明超,张茂胜
(1.上海电力学院自动化工程学院,上海 200090;2.江苏国艾电气有限公司,江苏盐城 224300)
基于自抗扰的微电网下垂控制
薛阳1,时宇飞1,阚东跃1,陈明超2,张茂胜2
(1.上海电力学院自动化工程学院,上海 200090;2.江苏国艾电气有限公司,江苏盐城 224300)
针对由分布式能源发电组成的微电网中进行负荷投切、分布式电源的波动性、电力电子器件参数变化等引起的谐波问题,提出一种基于自抗扰控制器的抗扰控制策略。通过将自抗扰控制器与微电网的下垂控制相结合,由内扰和外扰引起的输出电压波动,通过前馈补偿消除干扰,提高电能质量。仿真结果表明,当负荷变化时,直流侧电源突加扰动时,该控制策略具有较好的抗扰性能和鲁棒性。
微电网;下垂控制;自抗扰控制器;抗扰性;鲁棒性
考虑到环境污染问题以及能源的可持续利用,新能源发出的电能所占的比重将越来越大。由于太阳能、风能等新能源具有随机性,并且发电、并网过程大量电子器件的应用会造成并网电能谐波大,电压不稳定等电能质量问题[1-3]。微电网是将分布式能源、负荷、储能装置、变流器组合在一起的小型发配电系统,并且能自主与大电网之间进行投切,实现并网与孤岛两种运行方式。将分布式电源以微电网的形式接入配电网被普遍认为是分布式电源有效的方式,成为智能电网的一个研究热点[4-5]。微电网实现与大电网之间的平滑切换以及电能质量的管理,需要更好的控制策略。文献[6]指出,具备功率自动分配和电压稳定能力的鲁棒的、灵活的电力电子接口技术仍然是目前微电网应用的瓶颈技术和急需技术。微电网的下垂控制已有着广泛的研究[7-9],本文在微电网下垂控制的基础上增加了自抗扰技术,进一步提升微电网的平滑切换与抗扰能力。
自抗扰控制技术结合了传统PID控制理论以及现代控制理论,由于其快速跟踪与抗扰能力,在电机调速系统、风力发电系统、飞行器姿态控制、电力电子变化等领域得到广泛的应用[10-16]。文献[17]将自抗扰的状态观测器运用在单相逆变器上,来校正抗扰控制器的参数。文献[18]将自抗扰技术运用到微电网的下垂控制中,但没有分析自抗扰对谐波的抑制作用。本文在微电网的下垂控制基础上,进一步分析微电网数学模型,构造了扩张状态观测器。扩张状态观测器能够有效跟踪电压的输出状态,并对扰动变量进行前馈补偿,从而使下垂控制系统的扰动时间缩短,加快系统的收敛速度,抑制系统的输出误差。
1 建立系统模型
1.1 控制系统框图
微电网带自抗扰的下垂控制模型如图1所示。主电路中,直流电源Udc经三相逆变器、LC滤波电路接入三相负载R。其中,Lf为交流滤波电感;Cf为交流滤波电容。输出电压U0、电流i0经过功率计算得到负载的功率值P、Q,经过下垂控制、自抗扰控制器和电流闭环调节,得到电压控制信号U*0,再经SPWM生成器,转变为SPWM信号。

图1 带自抗扰控制器的下垂控制系统图Fig.1 Diagram of the droop control with ADRC system
1.2 建立下垂控制数学模型
下垂控制是通过模拟传统电力系统中同步发电机的下垂特性,实现逆变器之间无通讯的并联控制。下垂特性是发电机端电压的频率与有功功率、端电压的幅值与无功功率之间的关系。逆变器下垂控制的数学方程为[19]:

式中:f*、U*为频率、电压控制量;fn、Un为下垂的频率和电压的额定运行点;Pn、Qn为有功、无功的额定运行点;m、n为频率与电压的下垂系数;P、Q为逆变器输出的有功无功的实时检测值。图1中,由测量模块采集经过逆变器、滤波后的输出电压u0和电流i0,经功率计算环节得到逆变器输出的实时平均有功功率P、无功功率Q;与设定的有功功率Pn、无功功率Qn以及额定角频率ωn和额定输出电压U0n经过下垂控制环节得到参考电压u*0与参考角频率ω*。图1中的Park变换是把交流量变换为直流量,便于控制。通过下垂控制可以合理均分系统内的有功、无功功率,并且当负载变化时可以通过调节输出端的频率和电压幅值来调节有功功率与无功功率的输出。
1.3 建立控制对象的数学模型
图1中,以i*c为输入、U0为输出的逆变器电流内环控制模型如图2所示。

图2 电流内环控制模型Fig.2 Current inner loop control model
采用自抗扰控制器,实现了电压的无静差调节。电流内环调节是增加系统的稳定性,需要采用比例控制器。如图2中所示,KP为比例调节系数;KPWM为PWM生成器工作在线性区域的比例系数;i0为负载电流。图2中,以i*c为输入,u0为输出,电流内环在S域的传递函数为:

其中,K=KpKSPWM。可简写为:

其中,自抗扰控制器控制对象的传递函数为G(s),逆变器的等效输出阻抗为Z(s)。
被控对象的数学模型转换为微分的形式为:

1.4 建立带干扰的被控对象的数学模型
在新能源发电系统中,由于天气等因素的影响,使直流侧电压Vdc产生扰动。另外逆变器输出侧谐波、滤波电容电感变化、线路参数变化、温度变化、控制检测电路时延等,造成系统中产生扰动,逆变器的输出也会有很大扰动,电压电流谐波变大。设以上所有的扰动为集总扰动d,定义各种扰动量的函数为:

将式(7)代入式(6),可得到被控对象在扰动情况下的数学模型为:

2 自抗扰控制器的设计
文献[20]介绍了自抗扰的控制器结构。本文设计的自抗扰控制器结构图如图3所示。逆变器输出的是交流量,为了方便控制系统的设计,改善系统的动态性能,对三相静止abc坐标系下的交流量通过Park变化为两相同步旋转dq坐标系下的直流量,进行解耦控制。由式(4)知,被控对象可以看作二阶控制对象,其自抗扰控制器的结构图如图3所示。自抗扰控制器是由微分跟踪器(TD)、非线性PID、扩张状态观测器(extended state observer,ESO)三部分组成。

图3 二阶自抗扰控制器结构图Fig.3 Structure of second order ADRC
图3中,U*0是通过下垂控制整定出的控制系统参考值;U0是逆变控制系统的输出;u1、u2为微分跟踪器的输出;z1、z2、z3为三阶扩张状态观测器的输出;e1、e2分别为参考输入值与扩张观测状态观测器输出之间的误差、微分误差。I*c为电流内环控制的输入。
为避免系统稳态时产生高频震颤,本文的微分跟踪器采用其离散形式,定义为:

式中:h为采样步长;h0为滤波因子,滤波因子越大滤波效果越好;r为速度因子,速度因子越大跟踪速度越快,也就是说r越大过渡过程越快,反之,r越小过渡过程越慢;u0(t)为第t时刻的输入信号;ffst(u1(t),u2(t),r,h0)为时间最优控制综合非线性函数,其表达式为:

式中:d,d0,y0,a0,a为中间变量。
三阶扩张状态观测器,离散动态方程为:
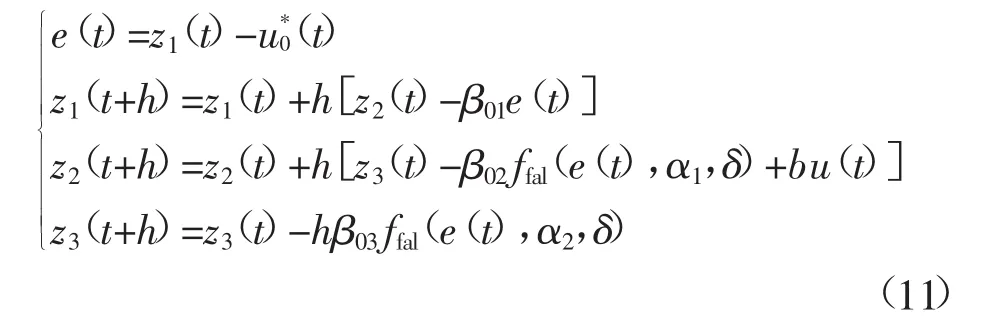
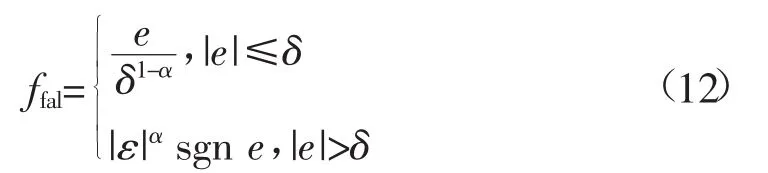
其中,非线性函数ffal(e,α,δ)为:
误差e1即TD给出的跟踪信号u1(t)与ESO输出的状态估计z1之差;误差e2即微分信号u2(t)与ESO输出的的状态估计z2之差。

然后用e1、e2的适当非线性函数产生u,因此u取为:

式中:β1、β2为NLSEF的可调参数。
自抗扰控制器能够跟踪电压输出的状态与参考电压进行比较,得到误差由非线性反馈,输入到电流内环控制。当微电网进行负载投切,并网、离网时,会有较大的冲击电流造成电压波动,自抗扰控制器能及时跟踪电压信号,通过电压前馈补偿,快速稳定电压。
3 仿真结果及分析
在Matlab/Simulink的仿真平台下,搭建带自抗扰的微电网下垂控制的仿真模型。仿真参数如下:逆变器直流侧电压为500 V,交流侧母线的电压幅值为220 V。逆变器输出滤波电容Cf=100 μH,滤波电感为Lf=2 mH,线路电阻为0.01 Ω,线路电感为0.5 mH,负荷为15 Ω电阻。自抗扰控制器的相关调节参数如表1所示。
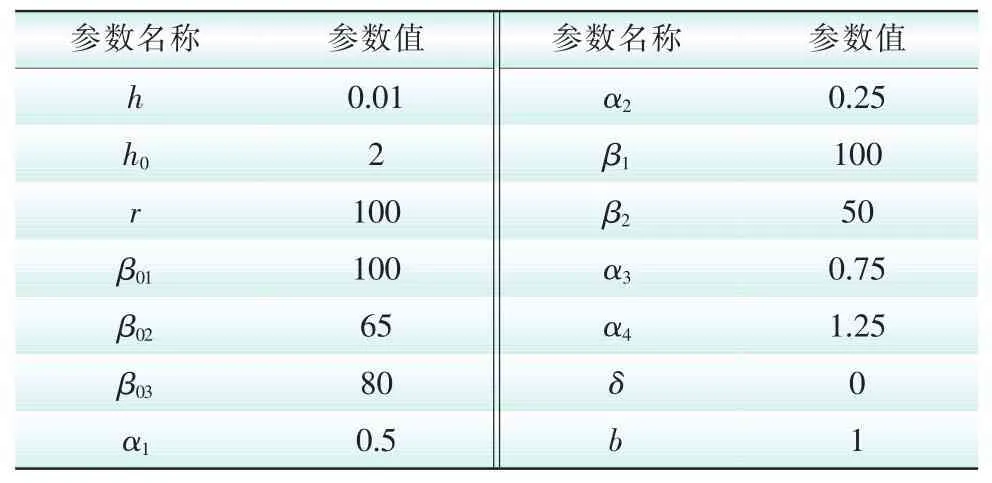
表1 自抗扰控制器的仿真参数Tab.1 Simulation parameters of ADRC
3.1 投、切负载运行
微电网运行孤岛运行模式,在仿真时间内,在t= 0.1 s时刻切除部分负荷,由原来的15 Ω变为10 Ω。在t=0.3 s时刻增加负荷,输出的电压、电流仿真结果如图4所示。从图4可以看出,t=0 s时刻,系统启动后,获得了良好的三相电压、电流波形。在t=0.1 s时,由于负载的切除,电流减小,输出的功率减少,而电压和频率由于下垂控制的调节,在一定范围内变小。在t=0.3 s时,投入负荷,电流增大,输出的功率增加,而电压和频率由于下垂控制的调节,在一定范围内变大。相应的功率输出与微网的频率调节过程如图5、图6所示。

图4 负载变化时电压、电流波形Fig.4 Voltage and current when load is changed
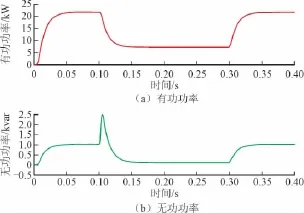
图5 负载变化运行有功、无功输出波形Fig.5 Active and reactive power when load is changed

图6 负载变化运行频率波形Fig.6 Frequency when load is changed
3.2 加扰动运行
在微电网孤岛稳定运行时,在逆变器的直流侧增加干扰。如图7所示,在t=0.2 s时刻加入幅值为40的正弦波与3次谐波的干扰。

图7 直流侧突加干扰时电压波形Fig.7 Voltage of DC side when interference is added suddenly
多次仿真结果证明,当加入的扰动幅值较小时,通过PID与自抗扰控制均能获得较好的波形。但是,当扰动量的幅值量过大时,自抗扰控制器能获得更好的控制效果,如图8、图9所示。
图8为微电网的输出电压波形。由图8可知,在t= 0.2 s时,突加扰动,ADRC调节下的微电网的电压波形变化很小,而PID调节下的电压波形畸变率很大。图9为加干扰时的频率变化情况,在t=0.2 s时,突加扰动,ADRC调节下的微电网的频率波动很小,而PID调节下的微电网频率波动较大。

图8 突加干扰时电压波形对比Fig.8 Comparison of voltage when interference is added suddenly
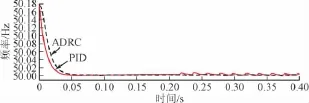
图9 突加干扰时频率变化对比Fig.9 Comparison of frequency when interference is added suddenly
4 结论
1)本论文微电网的的下垂控制调节与自抗扰控制器相结合的控制策略,获得良好的输出电压波形和电流波形。
2)该控制策略能很好地估计系统的内扰和外扰,通过前馈补偿,消除扰动带来的影响,使输出的三相电压、电流有较小的谐波,因此该控制策略具有较强的抗扰能力和鲁棒性。
3)无论在负荷变化时,还是在直流侧注入较大谐波时,该控制策略都能保持良好的输出波形,并且微电网的频率波动较小,能很好维持微电网的电压和频率稳定。
[1]易桂平,胡仁杰.分布式电源接入电网的电能质量问题研究综述[J].电网与清洁能源,2015(1):38-46.YI Guiping,HU Renjie.Survey on the power quality question resultant from connection of distributed power generation to the grid[J].Power System and Clean Energy,2015(1):38-46(in Chinese).
[2]陈波,李果,杨胜辉,等.新能源发电与电能质量问题浅析[J].电网与清洁能源,2012,28(6):91-96.CHEN Bo,LI Guo,YANG Shenghui,et al.A brief analysis of new energy and power quality[J].Power System and Clean Energy,2012,28(6):91-96(in Chinese).
[3]陈炜,艾欣,吴涛,等.光伏并网发电系统对电网的影响研究综述[J].电力自动化设备,2013(2):26-32.CHEN Wei,AI Xin,WU Tao,et al.Influence of gridconnected photovoltaic system on power network[J].Electric Power Automation Equipment,2013(2):26-32(in Chinese).
[4]王成山,武震,李鹏.微电网关键技术研究[J].电工技术学报,2014(2):1-12.WANG Chengshan,WU Zhen,LI Peng.Research on key technologies of microgrid[J].Transactions of China Electrotechnical Ociety,2014(2):1-12(in Chinese).
[5]沈沉,吴翔宇,王志文,等.微电网实践与发展思考[J].电力系统保护与控制,2014(5):1-11.SHEN Chen,WU Xiangyu,WANG Zhiwen,et al.Practice and rethinking of microgrids[J].Power System Protection and Control,2014(5):1-11(in Chinese).
[6]张洁,刘天琪,刘建华,等.提高微电网孤岛运行下垂控制动态性能的策略[J].电力系统及其自动化学报,2015,27(5):75-80.ZHANG Jie,LIU Tianqi,LIU Jianhua,et al.Droop control strategy for enhanced dynamic performance in islanding microgrid[J].Automation of Electric Power Systems,2015,27(5):75-80(in Chinese).
[7]杨志淳,刘开培,乐健,等.孤岛运行微电网中模糊PID下垂控制器设计[J].电力系统自动化,2013,37(12): 19-23.YANG Zhichun,LIU Kaipei,LE Jian.Design of fuzzy PID droop controllers for islanded microgrids[J].Automation of Electric Power Systems,2013,37(12):19-23(in Chinese).
[8]郑永伟,陈民铀,李闯,等.自适应调节下垂系数的微电网控制策略[J].电力系统自动化,2013,37(7):6-11.ZHENG Yongwei,CHEN Minyou,LI Chuang,et al.A microgrid control strategy based on adaptive drooping coefficient adjustment[J].Automation of Electric Power Systems,2013,37(7):6-11(in Chinese).
[9]杨新法,苏剑,吕志鹏,等.微电网技术综述[J].中国电机工程学报,2014(1):57-70.YANG Xinfa,SU Jian,LÜ Zhipeng,et al.Overview on micro-grid technology[J].Proceedings of the CSEE,2014(1):57-70(in Chinese).
[10]夏超英,郭海宇.无刷双馈电机自抗扰控制方法[J].控制与决策,2015,30(12):2293-2297.XIA Chaoying,GUO Haiyu.Active disturbance rejection controlstrategy forbrushless doubly-fed machine[J].Control and Decision,2015,30(12):2293-2297(in Chinese).
[11]李婉婷,厉虹.永磁同步电机自抗扰控制技术研究[J].电气传动,2015,45(9):20-24.LI Wanting,LI Hong.Research on active disturbance rejection control of PMSM[J].Electric Drive,2015,45(9):20-24(in Chinese).
[12]阮晓钢,王旭,陈志刚,等.独轮机器人的建模与自抗扰控制算法[J].控制与决策,2015,30(12):2253-2258.RUAN Xiaogang,WANG XU,CHEN Zhigang,et al.Modeling and active disturbance rejection control algorithm of single wheel robot[J].Control and Decision,2015,30(12):2253-2258(in Chinese).
[13]刘英培,梁海平,栗然.基于无源性与自抗扰控制的双馈风力发电系统研究[J].电工技术学报,2015,30(18): 121-130.LIU Yingpei,LIANG Haiping,LI Ran,et al.Research on doubly-fed wind power generation with passivity-based control and active disturbance rejection[J].Transactions of China Electrotechnical Society,2015,30(18):121-130(in Chinese).
[14]方勇纯,申辉,孙秀云,等.无人直升机航向自抗扰控制[J].控制理论与应用,2014,31(2):238-243.FANG Yongchun,SHEN Hui,SUN Xiuyun,et al.Active disturbance rejection control for heading of unmanned helicopter[J].Control Theory&Applications,2014,31(2):238-243(in Chinese).
[15]郭源博,周鑫,张晓华,等.三相电压型脉宽调制整流器的自抗扰控制[J].电力系统自动化,2011,35(16): 87-93.GUO Yuanbo,ZHOU Xin,ZHANG Xiaohua,et al.Autodisturbance rejection control for three-phase voltage-type PWM rectifier[J].Automation of Electric Power Systems,2011,35(16):87-93(in Chinese).
[16]王东阳,王奔,吴桂良.基于非线性自抗扰方法的电压型整流器直接功率控制策略[J].电测与仪表,2015,52(6):77-81.WANG Dongyang,WANG Ben,WU Guiliang.Voltage rectifier direct power control strategy based on nonlinear ADRC method[J].Electrical Measurement&Instrumentation,2015,52(6):77-81(in Chinese).
[17]闫士杰,闫伟航,冷冰,等.带阻抗观测器的单相逆变器抗扰控制[J].电机与控制学报,2014(7):44-50.YAN Shijie,YAN Weihang,LENG Bing,et al.Control strategy for single inverter with impedance observer[J].Electric Machines and Control,2014(7):44-50(in Chinese).
[18]朱昊,韦钢,吴万禄,等.自抗扰技术在微电网下垂控制策略中的应用[J].电力系统保护与控制,2014(9): 61-67.ZHU Hao,WEI Gang,WU Wanlu,et al.The ADRC applied in droop control strategy in microgrid[J].Power System Protection and Control,2014(9):61-67(in Chinese).
[19]徐玉琴,马焕均.基于改进下垂控制的逆变器并联运行技术[J].电力系统保护与控制,2015(7):103-107.XU Yuqin,MA Huanjun.Arallel operation technology of inverters based on improved droop control[J].Power System Protection and Control,2015(7):103-107(in Chinese).
[20]韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002(3):13-18.HAN Jingqing.From PID technology to“auto disturbance rejection control”[J].Control Engineering of China,2002(3):13-18(in Chinese).
(编辑 冯露)
Control Strategy for Microgrid Droop Control Based on ADRC
XUE Yang1,SHI Yufei1,KAN Dongyue1,CHEN Mingchao2,ZHANG Maosheng2
(1.School of Automation Engineering,Shanghai University of Electric Power,Shanghai 200090,China;2.Jiangsu Guoai Electric Co.,Ltd.,Yancheng 224300,Jiangsu,China)
To solve the problem of harmonics caused by load switching,distributed power fluctuation,power electronic device parameter changes of the microgrid composed of distributed energy generation,a disturbance rejection control strategy based on auto disturbance rejection controller(ADRC)is proposed in this paper.The quality of electric energy can be improved through the auto disturbance rejection controller(ADRC)and micro grid droop control combined.The output voltage fluctuation caused by internal disturbance and external disturbance can be estimated,then the interference be eliminated by feed forward compensation.The simulation results show that when the load changes,disturbances are suddenly added on the DC side power supply,this control strategy has better noise immunity and robustness.
microgrid;droop control;ADRC;disturbance rejection;robustness
2016-01-12。
薛 阳(1976—),男,博士后,副教授,主要研究领域为智能控制、微电网技术、太阳能发电等;
时宇飞(1991—),男,硕士研究生,主要研究领域为微电网控制及其经济优化运行等。
上海市自然科学基金资助项目(13ZR1417800);国家自然科学基金资助项目(51405286);上海市重点科技攻关计划项目(14110500700);上海市电站自动化技术重点实验室(13DZ2273800)。
Project Supported by the National Natural Science Foundation of Shanghai(13ZR1417 800);the National Natural Science Foundation of China(51405286);Key Project of Science and Technology Research Project of Shanghai(14110500700);Shanghai Key Laboratory of Power Station Automation Technology(13DZ2273800).
1674-3814(2016)11-0025-06
TM761
A
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
数学物理学报(2019年4期)2019-10-10
山东冶金(2019年3期)2019-07-10
雷达学报(2018年5期)2018-12-05
消费导刊(2018年10期)2018-08-20
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
通信电源技术(2016年1期)2016-04-16