
基于嵌入式系统的搬运机器人设计与路径规划研究
2017-01-13 07:23陶重刘壮宇孙云飞
计算机测量与控制 2016年8期
陶重,刘壮宇,孙云飞
(苏州科技大学电子与信息工程学院江苏省建筑智慧节能重点实验室,江苏苏州 215009)
基于嵌入式系统的搬运机器人设计与路径规划研究
(苏州科技大学电子与信息工程学院江苏省建筑智慧节能重点实验室,江苏苏州 215009)
为了解决目前工业搬运机器人发展的需求问题,设计了一款基于嵌入式系统的搬运机器人;该型搬运机器人的循线采用的是一种七路灰度传感器,并通过设计的一种蓝牙模块将灰度信息发送到手机端,从而简化了循线时的调试,具有创新性;搬运机器人前端安装有颜色传感器用以区分不同种类的物料;电机控制部分设计了一个PID闭环控制系统,通过PWM脉冲宽度调节来控制电机的转速;然后,针对模拟场地提出了一种路径规划算法,并通过设计的搬运机器人进行了实验测试与分析,验证了该方法的准确性和有效性。
搬运机器人;嵌入式系统;循线;路径规划
0 引言
在高速发展的信息化时代,机器人在人们的生活中扮演着举足轻重的角色,搬运机器人正逐步取代人工出现在一些工业生产岗位。工业用搬运机器人的主要目的是为了提高生产效率,降低生产成本,本文从系统的整体设计、电路设计、路径规划等方面实现了一种更为高效的搬运机器人方案。
李雷研究了在MCS-51单片机控制下的搬运机器人的系统设计,但是并没有提出对应的路径规划[1]。户硕设计了一款搬运机器人,能实现远程遥控机器人搬运物品,并能对搬运物品通过数据库进行物流管理[2],但该方法使用微处理器很难实现。王文凭等人设计了一种基于ATmega16单片机的搬运机器人,系统采用涡流传感器检测金属线进行路径识别。通过单片机控制舵机将货物运送到指定位置[3]。然而,该方法成本较高,不符合工业生产低成本的要求。本文使用ARM公司的STM32芯片,并采用μC/OS-Ⅱ系统,拥有比51单片机更高的效率和准确度,更加符合工业生产的要求。
为了实现搬运机器人的循迹功能,本文采用了两个七路灰度传感器,用于控制机器人前进和后退的循迹。针对需要搬运物料的种类,本文选择使用颜色传感器来区分,颜色传感器主要是通过将物体颜色同前面已经示教过的参考颜色进行比较来检测颜色,当两个颜色在一定的误差范围内相吻合时,输出检测结果[4]。地面的灰度数据使用手机蓝牙APP与蓝牙发射器连接后获得。机器人的速度的控制,本文采用了一个负反馈闭环控制系统,使得机器人的速度达到设定的值,更加精确地完成任务。
1 搬运机器人硬件设计
1.1 整体结构
搬运机器人采用7.4 V、1 000 m AHNi-cd蓄电池供电,以STM32F103RC芯片作为控制核心,使用驱动模块驱动电机控制机器人的行动以及机械手臂加持物料,配备有颜色识别传感器来分辨物料的颜色,并且使用灰度传感器对比赛场地的灰度数据进行采集并通过蓝牙发射器将数据传送到手机端,以完成按照设定好的路线前进的巡线功能,通过程序设定好的按键来控制启停。整体结构如图1所示。
1.2 颜色传感器模块设计
颜色传感器是通过将物体颜色同前面已经示教过的参考颜色进行比较来检测颜色,当两个颜色在一定的误差范围内相吻合时,输出检测结果。本文采用的是TCS230颜色传感器。

图1 搬运机器人整体结构
在每个采样-比较周期中,颜色采集系统中的单片机都会进行A/D转换,从颜色传感器读取RGB数据,并与事先存储在电可擦只读存储器中的颜色列表进行比较,得到最接近的颜色。在比较过程中,采用笛卡尔距离比较两种不同的颜色,其公式如下:

式中,Ru,Gu,Bu是未知色彩传感器值;Rr,Gr,Br是参考色彩传感器值。
上面的公式对于单片机来说过于复杂,在实际使用中会受到影响,因此对式(2)进行[5]简化为:

1.3 灰度传感器模块设计
本文设计中灰度传感器由白光二极管与光敏电阻组成。通过发光二极管照亮路面,地面的反射光线被光敏电阻吸收,电阻的阻值会随着反射的光线的强弱而发生变化。地面的颜色越深,反射的光越弱,光敏电阻的阻值越大。机器人底部的两个七路灰度传感器会将采集到的电信号传送到A/D转换器转换成数字信号,通过蓝牙传送到手机端的蓝牙串口通信APP。
本文将七路传感器定义为ADC1、ADC2、ADC3、ADC4、ADC5、ADC6、ADC7。当ADC3、ADC4、ADC5反馈的数值比较大时,说明机器人正沿着黑线行进。当ADC2返回的数值比较大时,说明机器人向右偏离,需要向左调整。当ADC6反馈的数值比较大时,说明机器人向左偏离,需要向右调整。流程如图3所示。

图2 灰度传感器工作流程图
此外,本文在巡线调试时,采用将ALIENTAK公司蓝牙发射器与STM32芯片连接的方式,将灰度传感器采集到的灰度信息发送到手机端,这种方法相对于其他灰度值校正的方法更加便利,每换一个环境就可以采集一次信息,准确性更高。此外,通过自行编写了相应的灰度采集的程序,可以获得每一种环境下对应的灰度。
2 PID闭环控制系统设计
本文设计的搬运机器人用的是电机作为机器人的左右轮以及机械手臂。与其他类型的电机相似,使用PWM脉冲宽度调节来控制电机的转向以及转速,其特点是结构紧凑、易安装调试、控制简单、大扭力、成本较低等。
在PWM控制直流电机中,本文可以将变换器看做一个环节,当控制电压变换时,PWM变换器输出平均电压按线性规律变化,但是其响应会有延迟,最大的时延是一个开关周期T[6],其传递函数是:

PID调节器传递函数为:

由此我们可以得到PID的直流调速系统如图3所示。

图3 直流调速系统
在仿真过程中,本文发现PID控制方式比开环直流电机控制和转速单闭环相比有着明显的优势,在系统稳定性上面,PID控制可以加快系统的响应速度,提高系统调节精度。
3 路径规划设计与试验
3.1 模拟场地
工业生产中,由于生产车间与物料存储的地点以及成品的放置地点有一定的距离,本文中采用中国机器人大赛智能搬运项目(光电组)的比赛图纸作为路径规划的模拟场地,如图4 (a)。场景机制是随机抽取ABCDE五点的物料的颜色,在ACE点放置物料,在FG处按照ABCDE的顺序放置物料,机器人从出发点出发,将所有的物料从到对应颜色的区域,最后回到出发点,任务完成。
3.2 路径规划
本文通过实际的比赛经验,提出了一种行之有效的路径规划算法。算法的核心思想是“以直线代替曲线,提高巡线准确性”。相对于用五段三次多项式方法对一种搬运机器人的运行轨迹进行规划,并利用Matlab工具对该方法进行仿真分析[7 8],本文的方法更具有实用性。本文选取A、B、C、D、E分别为蓝、黑、红、白、绿的顺序来进行模拟搬运。
本文提出的方案是先将A、C、E三处的物料运送到各自的仓库中,然后将F、G两处的物料分拣出来,即将E、F中的绿色分拣出来送到A处,白色分拣出来送到B处,红色分拣出来送到C处,黑色分拣出来送到D处,蓝色分拣出来送到E处,最后再分别将物料推送到各自的仓库之中。此设计完全是按照直线,即遵循的是两点之间直线最短的方式进行的。根据场地规划,我们采用“以直代曲”的方案,即全部按照直线前进。对于A处放置蓝色物料的情况设计的路径示意图如图4(b)。
文献[1]采用的方案则是将物料一个个搬运至对应的仓库并且最大化利用曲线,整体思路是路径最短原则,路径如图4(c);文献[2]采用的方法是将所有的物料都搬运至中心点处,然后将物料分别送到对应的仓库中,该方案的路径如图4(d)。
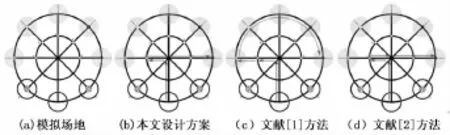
图4 路径示意图
3.3 试验方法与分析
本文对上述的3种方案是否可行进行了试验,试验方法为多次测量求平均值,测量的对象是完成一次任务所需要的时间、能耗以及出错率。由于有3个指标需要比较,我们采用了加权平均的方法对每一个方案进行综合评分,其中出错率占50%(工业生产中出错率是最为重要的指标),时间占25%、能耗占25%。各项指标如下面的表1。
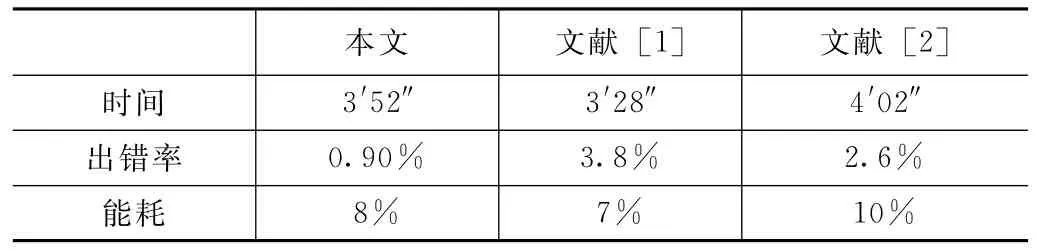
表1 各项指标
根据3个试验方案的实际情况,本文设计了评分标准如图2所示。

表2 评分标准
加权平均数公式为:

其中:f1+f2+…fk=n。
根据以上公式,可以求出本文方案评分为92.5,文献[1]方案的评分为87.5,文献[2]方案的评分为77.5。由此可以看出,本文设计的方案最能符合工业生产的要求。
4 实验与比较
针对本文设计的工业用搬运机器人,我们做出了模型,并且在中国机器人大赛智能搬运组的场地上进行了模拟运行。实验过程如图5所示。
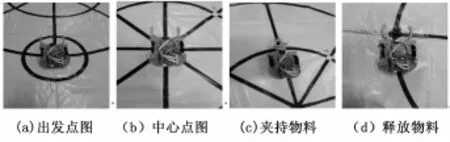
图5 实验过程
5 结论
本文设计并实现的搬运机器人采用STM32芯片,STM32芯片在处理复杂任务时效率更高,PID闭环控制的电机调速系统使得该机器人用于工业生产的稳定性和精确性得到了提高,颜色传感器基于STM32的处理速度大大提升。本文提出的“以直代曲”路径规划实用性强。在后来的实际测试中发现,灰度传感器受光照影响比较大,后期可能会采用三极管或者红外的方式来改进。
[1]李 雷.基于MCS-51控制的军用自动仓储搬运机器人设计实现[J].系统仿真技术,2011,7(2):100-103.
[2]户 硕.搬运机器人的设计与制作[J].煤矿机械,2015,8:18 -20.
[3]王文凭,李天培,冯根生.一种智能搬运机器人的设计与实现[J].计算机测量与控制,2011,19(2):395-398.
[4]蒋 嵘,吴晨曦,蒋 峥.一种智能寻迹与搬运机器人的控制系统设计[J].计算机测量与控制,2015,23(4):1209-1211.
[5]张智博,王 艳,殷天明.基于TCS230的颜色识别系统设计[J].机械与电子,2010(S1):54-57.
[6]崔家瑞,李 擎,张 波.永磁同步电机变论域自适应模糊PID控制[J].中国电机工程学报,2013,33(z1).
[7]李伟光,许阳钊.搬运机器人的轨迹规划[J].组合机床与自动化加工技术,2010(5):83-85.
[8]丁 磊,李 恩,谭 民.五自由度搬运机器人系统设计与运动学分析[J].华中科技大学学报:自然科学版,2015(S1).
Research of Transfer Robot Design and Path Planning Based on the Embedded System
Tao Chongben,Liu Zhuangyu,Sun Yunfei
(University of Electronic and Information Engineering,Suzhou University of Science and Technology,Suzhou 215009,China)
To solve the needs of the development of the industrial transfer robot,designed a kind of robot based on embedded system,this kind of robot used a seven road gray sensor to follow line,and through a Bluetooth module sending gray information to mobile terminal,in order to simplify the debugging of following line,it has certain creativity.Transfer robot is equipped with color sensor to distinguish different materials.A closed-loop control system of PID is designed in motor control part,through the pulse width adjustment to control the motor speed.Finally,put forward a kind of efficient path planning algorithm in simulation field,and carried on experiment test and analysis by the transfer robot.Established a set of evaluation standard meets the needs of industrial production,and comprehensive comparison is made for the path with other ratings,finally came to the conclusion that this proposed method is accurate and effective.
transfer robot;embedded system;follow line;path planning
1671-4598(2016)08-0215-03
10.16526/j.cnki.11-4762/tp.2016.08.059
:TP311
:A
2016-01-29;
:2016-03-24。
国家自然科学基金(61401297);江苏省自然科学基金(BK20140283);江苏省教改重点项目:(号2013JSJG063);江苏省社科基金教育学青年项目(15JYC008)。
陶重犇(1985-),男,江苏昆山人,博士研究生,讲师,主要从事移动机器人路径规划、智能机器人系统方向的研究。
猜你喜欢
工业设计(2022年7期)2022-08-12
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
自动化学报(2017年5期)2017-05-14
玩具世界(2017年8期)2017-02-06
光学精密工程(2016年1期)2016-11-07
少儿科学周刊·儿童版(2015年11期)2015-12-17
