
动态背景下运动目标检测与跟踪研究
2017-01-13 07:23邵万开石澄贤
计算机测量与控制 2016年8期
邵万开,石澄贤
(常州大学信息科学与工程学院,江苏常州 213164)
动态背景下运动目标检测与跟踪研究
邵万开,石澄贤
(常州大学信息科学与工程学院,江苏常州 213164)
主要研究动态背景下的运动目标检测和跟踪问题;背景补偿差分法是一种常用的动态背景下运动目标检测算法,但检测到的目标轮廓要比其真实轮廓大,检测结果不准确且算法复杂度较高;主动轮廓模型在图像分割和目标提取过程中具有拓扑结构变化灵活性,对数值计算方案的设计更加方便、有效,据此提出一种基于改进C-V模型和卡尔曼滤波的算法,用来检测和跟踪动态背景下的运动目标;提出的算法利用C-V模型曲线演化检测和跟踪目标,使C-V模型在目标的边缘处收敛;结合卡尔曼滤波预测运动目标下一帧位置,从而实现对运动目标轮廓的跟踪;实验结果表明,该方法可以对动态背景下运动目标进行精确的检测与跟踪。
C-V模型;目标检测;目标跟踪;卡尔曼滤波
0 引言
基于图像序列的运动目标检测和跟踪是机器视觉领域的热点问题,在人机交互、视频监控[1 2]、智能交通等领域有着广泛应用。
运动目标检测技术[3]是指将运动目标从视频背景中分离出来,主要方法有:光流法、帧间差分法、背景差分法。光流法,即给予图像上各像素点速度矢量,再将空间中运动场投射到图像上,若图像上速度矢量连续变化,则该像素是运动目标。该方法不需要预先知道现场环境信息,就能够检测出运动目标,有很强的适应性,但计算相当复杂,对噪声敏感,抗噪性能差。帧间差分法,即对连续两帧图像进行差分,优点是计算简单,受光线变化影响小,但分割精度不高,无法准确分割运动目标。背景差分法,即用当前帧图像和背景帧图像作差分,优点是易于实现,能够较为完整地分割出目标,但易受光线变化等情况影响。
运动目标跟踪技术[4]是指在连续的视频图像序列中实时找出运动目标,主要方法有:基于目标模型跟踪、基于目标区域跟踪、基于目标特征跟踪以及基于目标轮廓跟踪。相比其他方法,基于目标轮廓跟踪,可自动更新曲线轮廓表示跟踪目标,最终实现目标跟踪。几何主动轮廓模型 (Geometric active contour model)能够较好地拟合出运动目标轮廓,因此在基于轮廓的目标跟踪理论中,几何主动轮廓模型获得了较多的应用。
1 动态背景下运动目标检测与分割
运动目标检测与分割时,对目标背景的处理尤为重要。目标的背景往往被分为静态背景和动态背景两类。静态背景下的运动目标检测与分割,主要考虑如何对目标的静态背景建模与更新,再进行背景差分等操作,便能得到较好的检测结果。相比静态背景,动态背景下的运动目标检测与分割更为复杂,因为绝大多数适用于静态背景下的运动目标检测与分割算法,并不能正确进行动态背景下的运动目标检测与分割。下面主要研究动态背景下的运动目标检测和跟踪。
动态背景下常用的运动目标检测算法,主要有光流法以及背景补偿差分法。光流法引言中已有简单介绍,这里不再作相关阐述。背景补偿差分法,主要是先对背景运动参数进行计算,将计算得出的运动参数用于背景补偿,从而将动态背景问题转化为静态背景问题,再进行背景差分法检测运动目标。计算背景运动参数首先要建立合适的全局运动参数模型,下面对全局运动参数模型[5]进行简单介绍。
1.1 全局运动参数模型
摄像机在监测视频时,因自身绕轴转动,造成视频中第k -1帧图像像素点(xk-1,yk-1),移动到第k帧图像像素点(xk,yk)处。(xk-1,yk-1)和(xk,yk)满足全局运动参数模型f :

常见的全局运动参数模型主要有:双线性运动参数模型,投影运动参数模型,平移运动参数模型,仿射运动参数模型。其中,仿射运动参数模型是平移运动参数模型的推广,能够较好的处理平移和旋转运动,相对其他模型计算起来也较为简单,常用来计算运动参数时的建模。接着对相邻两帧图像进行特征匹配,获取大量的匹配特征点对,利用最小二乘法得到运动参数模型中参数的近似解。
1.2 基于背景补偿差分的运动目标检测
对背景帧fk-1中每点像素(xk-1,yk-1),运用计算得出的仿射运动参数模型f进行仿射变换,得到变换帧f′k中对应像素点(x′k-1,y′k-1),用当前帧fk与变换帧f′k作差分,得到两者间二值图像。
二值图像往往存在含有空洞等问题,所以要先对二值图像进行连通性分析,利用形态学中的膨胀与腐蚀处理方法,填补空洞。经过形态学处理后,二值图像消除了大部分的空洞,但仍然可能存在多余的噪声干扰,所以还需要采用阈值面积法对图像除噪,最终得到目标轮廓,检测出动态背景下的运动目标。
2 基于C-V模型和卡尔曼滤波的目标检测与跟踪
2.1 基于C-V模型的运动目标检测
通过背景补偿差分检测到的运动目标往往并不准确,这是因为二值图像经过形态学膨胀、腐蚀等处理,得到的目标轮廓要比运动目标实际轮廓大,而且方法实现过程中费时费力,可行性不高。对此,提出了一种基于C-V模型的动态背景下运动目标检测与分割。
主动轮廓模型[6]用封闭曲线来分割图像中的目标,以能量函数来表示这条封闭曲线,将图像分割问题归结于最小化封闭曲线的能量函数。
C-V模型[7]是一种基于区域的主动轮廓模型,通过对目标区域的检测实现图像分割。这种模型利用图像同质区域的全局信息,可以自动检测目标的内外轮廓,更加适合分割目标模糊的图像。但是传统的C-V模型,仅利用区域信息的片面性,没有考虑到边缘信息,在分割过程中常常会出现一些问题。考虑边缘信息对图像分割的重要性,将边缘信息引入CV模型是改善分割性能的有效途径,目前已有很多相关的研究。Lei Zhang等人通过改变原来C-V模型统计区域内外的信息为统计局部信息来改善分割性能,满足对多目标区域不同统计量值的分割[8]。马时平等人针对红外图像中包含较强噪声,提出保留C-V模型的全局优化特性,通过窗口滤波整合图像邻域空间信息来构建曲线进化的外部速度,从而提高CV模型的抗噪性能并减少分割中产生的冗余轮廓,对边缘模糊、噪声较大的图像能实现快速而有效的分割[9]。
选取C-V模型作为演化曲线的能量函数,并且融入边缘信息对C-V模型加以改进,提出了一种基于区域和边缘信息的改进C-V模型,实现了动态背景下的运动目标检测与分割。新模型的能量泛函如下:
式中,φ是水平集函数,R2是图像区域,H(φ)是Heaviside函数,δ(φ)是Dirac函数。式(2)中,前两项的作用是让零水平集函数更好地拟合目标边缘,第三项对应演化曲线的长度,起正则化作用。实际计算中,H(φ)函数和δ(φ)函数用如下的规则化函数来求解:

g(ω)为边缘引导函数,ω是与图像梯度有关的参数,α为常量。定义为:

利用梯度下降流演化方法,最小化式(2)的能量,得到水平集演化的偏微分方程:

利用边缘引导函数g(ω),能更好的控制轮廓曲线在图像的边缘处停止运动,从而实现动态背景下运动目标检测与分割。
2.2 基于卡尔曼滤波的目标跟踪
采用卡尔曼滤波算法[10]预测目标质心在下一帧图像中的位置,再带入C-V模型进行曲线演化,使C-V模型在目标的边缘处收敛,实现动态背景下对运动目标的跟踪。首先建立运动目标的状态方程以及测量方程:

其中:X(k)=[x(k),y(k),S,Δx(k),Δy(k),ΔS]T为状态向量,X(k)中变量分别表示目标质心k时刻x轴坐标,y轴坐标,目标面积,时间间隔T=0.2内目标质心x轴坐标变化量,y轴坐标变化量,目标面积变化量。动态噪声W(k)、测量噪声V(k)均值都是0。
预测方程:

校正方程:

状态转移矩阵、测量矩阵分别为:

式中,^X-(k)为k时刻X(k)的先验估计,P-(k)为^X-(k)误差协方差;K(k)为卡尔曼增益矩阵,^X(k)为后验状态估计,P(k)为^X(k)误差协方差矩阵,R 为V(k)的协方差矩阵,Q为W(k)的协方差矩阵。
采用卡尔曼滤波,先估计当前帧目标质心位置,再预测下一帧目标质心位置。将当前帧运动目标检测所得精确轮廓移至相应位置,利用改进C-V模型控制轮廓曲线演化,曲线演化停止时,得到运动目标下一帧位置的精确轮廓,实现了动态背景下运动目标的检测与追踪。另外,对下一帧精确轮廓提取目标特征(面积、质心坐标)后,重新传给卡尔曼滤波状态方程,更新状态向量X(k),修正误差,从而提高卡尔曼滤波预测目标质心的准确性。
2.3 基于C-V模型和卡尔曼滤波目标跟踪算法
输入视频图像序列,对第一帧图像用改进C-V模型检测出运动目标,提取目标精确轮廓,并标记出目标质心;将目标质心代入卡尔曼滤波方程中,预测出下一帧中运动目标的质心位置;以当前帧目标轮廓作为初始化曲线,用改进C-V模型演化轮廓进行图像分割,最终实现运动目标的检测与追踪。采用上述算法,成功解决了动态背景下难以检测出运动目标的问题。流程图如图1所示。

图1 目标跟踪算法流程图
3 实验结果与分析
图2选自一组共50帧的动态背景下序列图像,每帧图像大小140*99。选取第一帧图像作为背景帧,如图2(a);选取第30帧图像作为当前帧,如图2(b);图2(c)是背景帧与当前帧的直接差分图像;图2(d)是背景帧进行仿射变换后得到的变换帧图像;图2(e)是背景补偿差分图像;图2 (f)自定义初始演化曲线,利用改进C-V模型最终分割出的运动目标。改进C-V模型参数设置:α=0.01,μ=1,ε=0.2,迭代步长Δt=0.01,迭代次数50次。实验结果表明,动态背景下直接背景差分无法正确检测出期望的运动目标;经过背景补偿后的背景差分则能够较好的检测出运动目标,但是得到的目标轮廓要比运动目标实际轮廓大,不够精确。

图2动态背景下运动目标检测
图3 选自一组共40帧的动态背景红外序列图像,每帧图像大小230*170。图3(a)中点为第30帧图像中目标质心,图3(b)、(c)中点分别为利用卡尔曼滤波算法预测的第40、50帧图像中目标质心的位置,红点分别为第45、50帧图像中目标质心的测量位置。预测位置和测量位置很接近,证明了卡尔曼滤波预测的准确性。

图3动态背景下卡尔曼滤波预测目标质心
图4 选自一组共有50帧的动态背景行人跑步红外序列图像,每5帧结合卡尔曼滤波算法以及改进C-V模型进行一次检测与跟踪,每帧图像大小210*140。改进C-V模型参数设置:α=0.01,μ=1,ε=0.2,迭代步长Δt=0.01,迭代次数50次。实验结果表明,本文方法可以准确预测每帧图像中的运动目标位置,改进C-V模型可以准确分割每帧图像中的运动目标。完成了有效而准确的目标检测与跟踪实验。
4 结束语
提出一种基于改进C-V模型和卡尔曼滤波算法的目标检测与跟踪算法。算法利用改进C-V模型检测出动态背景下的运动目标,提取目标精确轮廓,并标记出目标质心。后通过卡尔曼滤波预测目标质心下一帧位置,以改进C-V模型最终实现对动态背景下运动目标的检测与跟踪操作。同时,对下一帧精确轮廓提取目标特征(面积、质心坐标)后,重新传给卡尔曼滤波状态方程,更新状态向量,修正误差,从而提高卡尔曼滤波预测目标质心的准确性。实验结果表明,该方法是切实可行的。同时,要比基于背景补偿差分的动态背景下运动目标检测更为准确、有效。
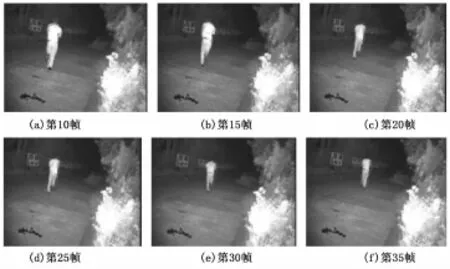
图4 红外视频跟踪图
[1]Kim,Min-Gu,Moon,et al.A study on the human identification technique for privacy protection in intelligent video surveillance system[A].IEEE Asia-Pacific Services Computing Conference[C].APSCC,2011:402-405.
[2]Karasulu,Bahadir,Korukoglu,et al,Moving object detection and tracking by using annealed background subtraction method in videos:Performance optimization[J].Expert Systems with Applications.2012(39):33-43.
[3]Zhang X L,Li Z P,Zhou T G,et al.Neural activities in V1 create a bottom-up saliency map[J].Neuron,2012(1).
[4]Liang WH,Wang J Q,Ding H F,et al.Moving target detection based on the improved Gaussian mixture model background difference method[J].Advanced Materials Research,2012(482).
[5]Su Y P,Sun M T.A non-iterative motion vector based global motion estimation algorithm[A].IEEE Int.Conf.Multimedia Expo (ICME)[C].2004.
[6]Osher S,Sethian J A.Fronts propagation with curvature dependent speed:Algorithmbased onHamilton-Jacobi formulation[J].Journal of Computational Physics,1988,79(1):12-49.
[7]Chan T F,Vese L A.Active contours without edges[J].IEEE Transactions on Image Processing,2001.
[8]Zhang K H,Song HH,Zhang L.Active contours driven by local image fitting energy[J].PatternRecognition,2010,43(4):1199-1206.
[9]危自福,毕笃彦,马时平.一种改进的快速C-V水平集红外图像分割[J].数据采集与处理,2010,25(3):347-352.
[10]Havlicek M,Friston K J,Jan J,et al.Dynamic modeling of neuronal responses in f MRI using cubature Kalman filtering[J].Neuroimage.2012.
Moving Object Detection and Tracking under Dynamic Background
Shao Wankai,Shi Chengxian
(School of Information Science&Engineering,Changzhou University,Changzhou 213164,China)
The moving object detection and tracking technology under dynamic background is mainly researched.Background compensation difference is commonly used for moving object detection and tracking technology under dynamic background.Contour of moving object detected by background compensation difference is larger than the real contour,that the detection result is not accurate and the computational complexity is higher.Active contour model is flexible in topology,also convenient and effective in the design of numerical calculation for image segmentation and object extraction process.An new algorithm which is based on the improved C-V and the Kalman filter model is proposed to detect and track the moving objects under dynamic background.The algorithm uses the improved C-V model to perform the curve evolution for moving object detection and tracking,making the evolving curve approach to the edge of the object.Kalman filter is used to predict the next frame of the object position,so as to achieve the tracking of the moving object.The experimental results show that the method is suitable for the detection and tracking of objects under dynamic background.
C-V model;object detection;object tracking;Kalman filter
1671-4598(2016)08-0052-04
10.16526/j.cnki.11-4762/tp.2016.08.014
:TP391.9
:A
2016-03-06;
:2016-04-05。
国家自然科学基金资助项目(61572085)。
邵万开(1990-),男,江苏扬州人,硕士研究生,主要从事图像分割和目标跟踪方向的研究。
石澄贤(1961-),男,江苏常州人,教授,硕士研究生导师,主要从事视觉识别和图像分割方向的研究。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
北京航空航天大学学报(2017年9期)2017-12-18
中国交通信息化(2017年4期)2017-06-06
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
航天器工程(2014年5期)2014-03-11
电子设计工程(2014年6期)2014-02-27
