
移动式太阳能增氧机的改进设计与试验
2017-01-13 03:04张拥军田昌凤邹海生邢精珠陈晓龙
渔业现代化 2016年6期
朱 烨, 张拥军, 田昌凤, 陈 超, 邹海生, 洪 扬, 邢精珠, 陈晓龙
(农业部渔业装备与工程技术重点实验室,中国水产科学研究院渔业机械仪器研究所,上海 200092)
移动式太阳能增氧机的改进设计与试验
朱 烨, 张拥军, 田昌凤, 陈 超, 邹海生, 洪 扬, 邢精珠, 陈晓龙
(农业部渔业装备与工程技术重点实验室,中国水产科学研究院渔业机械仪器研究所,上海 200092)
为进一步提高移动式太阳能增氧机的使用效率、降低开发成本,采用Solidworks软件对原型机进行了改进设计及性能测试。通过对运动控制系统的简化和采用非接触式换向的水面行走机构,使得来回行走更加灵敏。性能测试结果显示,改进后的移动式太阳能增氧机,当光照度为17 000 Lx,转速可达到34 r/min。光照度越强,叶轮转动越快,其增氧效率也越高。在输入电压24 V时,选用8.2 kΩ和2 kΩ电阻进行分压,可以使控制电压达到4.7 V。对光敏传感器进行的优化结果表明,选用4.2 kΩ光敏阻值,在低光照强度下能够达到最低20 r/min的转速要求,遥控距离可达到45 m,平均运行时间可达6 h/d左右。电气控制系统采用单元模块,以及更加便捷的水面行走机构,不仅实现了原型机的全部控制要求,还降低了材料成本费用。结果表明,改进后的增氧机性能稳定可靠,适于在池塘养殖中推广。
太阳能;增氧机;水面行走机构;光敏传感器;池塘
水体含氧量是鱼类赖以生存的最基本条件[1],但自然增氧的效率较低,通常采用机械增氧[2-6]。吴宗凡等[7]研究了移动式太阳能增氧机的性能,但未涉及该装置的设计理论;田昌凤等[8]在前期研究基础上,研发了一种池塘移动式太阳能增氧机,该机主要由太阳能动力组件、增氧装置和水面行走机构组成。太阳能动力组件将太阳能转化为电能,增氧装置围绕水面行走机构做圆周运动,实现上下水体交换,增加水体与阳光的接触面积,提高增氧能力;水面行走机构可实现增氧装置在池塘水面来回行走。
池塘移动式太阳能增氧机在推广过程中取得了良好的效果,但也发现了一些诸如在长时间运行时存在水面行走机构换向不灵敏、维修不方便、钢丝绳磨损严重等问题。为了进一步提高移动式太阳能增氧机的可靠性和经济性,对行走机构和控制系统进行了改进,采用非接触式换向和陶瓷套管的方法,减小钢丝绳的摩擦损耗;对光敏传感器进行优化,以简化控制系统。本文对原池塘移动式太阳能增氧机(以下简称原型机)的水面行走机构和控制系统进行了改进及试验。
1 行走机构的改进
1.1 改进前后的结构
原型机的水面行走机构包括机构舱、导电滑环、直流小电机、牵引轮、牵引轮罩壳、导向机构、限位块组件等,安装在动力组件的支架上(图1)。
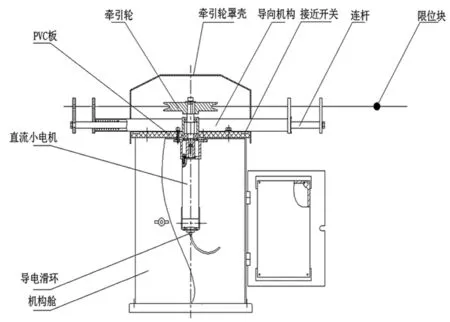
图1 原型机的行走机构Fig.1 The original walking mechanism
然后将牵引绳绕在牵引轮上,通过连杆,并在牵引绳上固定2个限位块。最后将牵引绳固定在池塘两侧。当导向机构碰到限位块时,内部弹簧受挤压,连杆内部磁铁碰到PVC板上的片式磁性接近开关,则直流小电机可实现换向功能[8]。但这种挤压式换向结构,在长期运行过程中出现换向不灵敏的现象,而且钢丝绳的损耗较大。
改进后的结构如图2所示,主要的改进内容为:(1)取消原来的导向机构,实现了非接触式换向,由牵引绳两端各固定一个永磁铁,在距离磁性接近开关4~5 cm时小电机就可以实现换向功能。此换向可减少摩擦损耗,而且灵活性、稳定性较高;(2)牵引轮由水平改为竖直,少了导杆限位组件,导杆中间有2个是陶瓷套管,这样就减少了牵引绳的磨损,在移动过程中更加灵活,而且还能使换向更加容易,损耗达到最小;(3)原型机的直流电机放在机构舱内部,改进后将电机放在了罩壳内部,使内部结构更加简单、接线方便、节省空间。
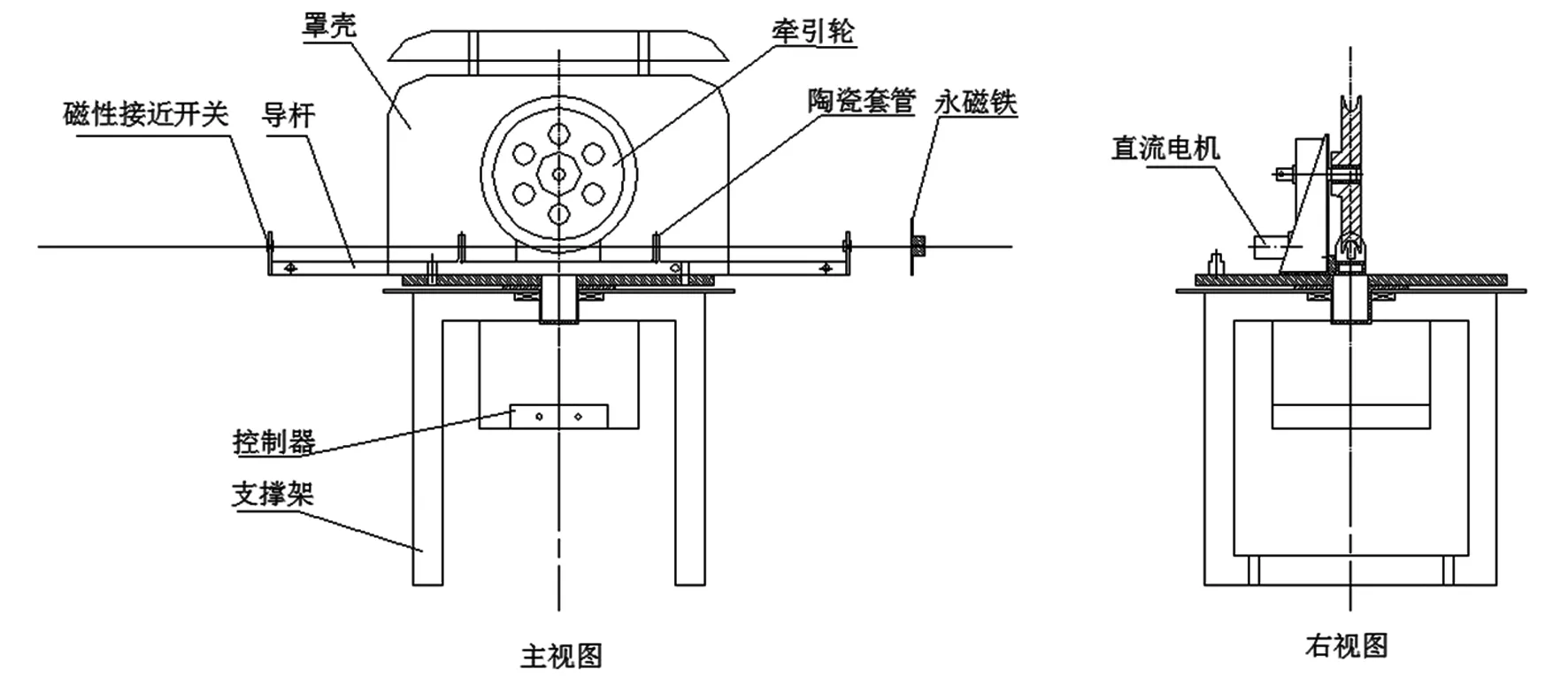
图2 改进后的行走机构Fig.2 Improved walking mechanism
1.2 控制系统
原型机的控制系统如图3所示。
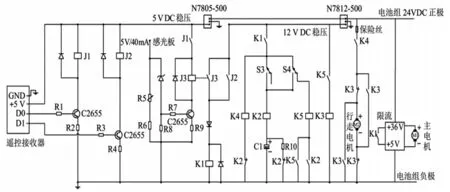
图3 原型机的控制系统Fig.3 The original control system
采用遥控方法,可以自动控制运行。系统由控制电路板、升压模块、降压模块、无线接收模块、电压调速模块组成,当光照强度达到17 000 Lx时,控制器开始检测电压是否达到可运行的工作电压,如果达到则增氧机电机启动,延迟10 s后小电机运行,并且可以实现自动换向;如果没有达到工作电压则停止工作。虽然这些功能可遥控实现,操作方便,但系统设计复杂,需要36 V、24 V、5 V三组电源,并且程序编写复杂,维修不方便。
改进后的控制系统采用光控和遥控[9],主要由光控模块、时间继电器模块、小型继电器、遥控模块组成。当光照强度达到17 000 Lx时,光控传感器满足条件,设备启动和运行,然后通过遥控模块WCM,可在45 m距离开启或关闭设备,控制变得更加高效。改进后的控制系统更加简化,可实现全部功能,并且程序编写简单、维修方便。控制系统原理如图4所示。
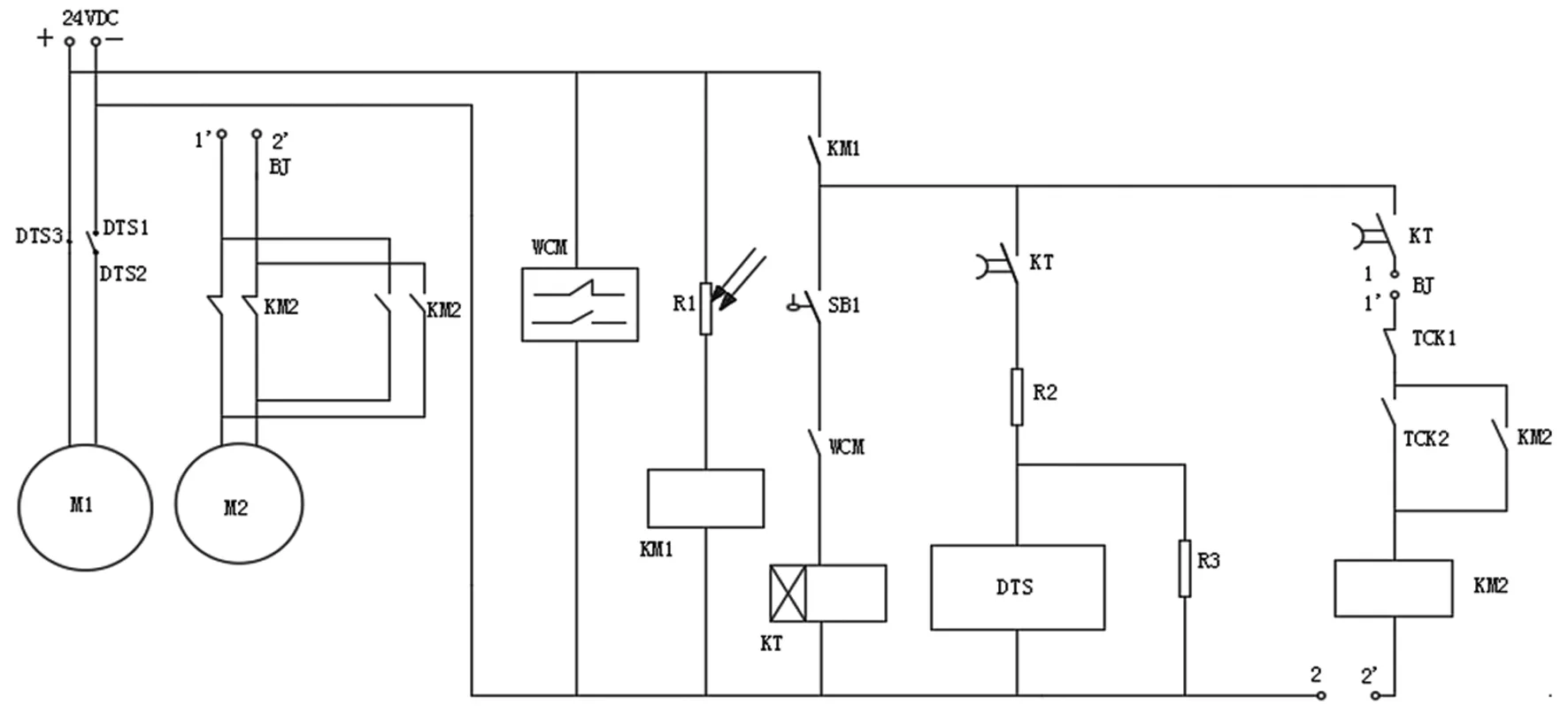
图4 改进后的控制系统Fig.4 Improved control system
控制过程:在池塘试验时,液位开关SB1自动闭合,遥控模块打开,光照强度达到要求时,光敏传感器KM1导通,导通后通过时间延迟继电器KT延迟,增氧机电机M1的运行通过分压模块来控制,选择分压电阻R2为8.2 kΩ和R3为2 kΩ,得到控制电压为0~5 V,同时换向电机M2启动,行走机构开始运行,当磁铁碰到常开接近开关TCK2时,KM2继电器闭合,其常开触点打开,常闭触点闭合,行走机构换向,实现来回行走的功能。当光照强度和电压不能满足要求时,液位开关打开,遥控关断,设备停止运行。其控制流程如图5所示。用Solidworks软件设计的改进后的系统结构如图6所示。
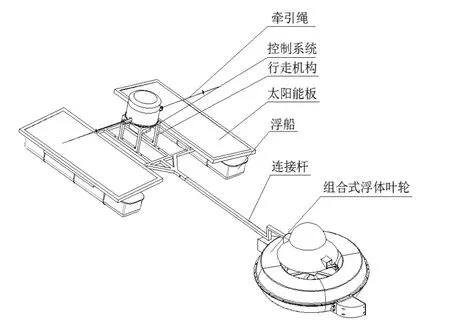
图6 改进的系统结构示意图Fig.6 Schematic diagram of the improved system structure
2 试验结果
2.1 行走机构
行走机构可实现来回往复行走,移动作业面大,覆盖范围广。为了验证行走机构的可靠性,在池塘试验前先进行实验室模拟运行试验。给行走机构24 V直流电进行试验,小电机转动,5 min后用永磁铁靠近导杆的一端,在4 cm左右处,小电机反转,再将永磁铁靠近导杆另一端,小电机正转。由此证明,永磁铁可以作为一个换向信号,并且换向动作灵敏。在池塘试验过程中,选择行走机构的行程距离分别为2 m和3 m,对比原先的行走机构数据[8],每天运行5 h,分别记录带负载时的单程运行时间、累积次数、平均速度,结果见表1。
从表1可以看出,改进后的行走机构在负载情况下,单程运行时间要比原型的短,运行速度更快,累积次数更多,这主要是因为行走机构由原来的挤压式换向改为非接触式换向,挤压式换向摩擦系数大,而且会出现不灵敏现象。

表1 行走机构负载情况下试验数据
2.2 光敏传感器优化
光敏传感器[10]是控制系统的关键设备。一般的光敏传感器太过敏感,在有光照的情况下就能启动,而且必须在光线很暗的情况下才会停止运行,不满足试验需要,因此有必要对光敏传感器进行优化处理。记录试验过程中不同时间点、不同光照度下的阻值及电路导通状态(表2)。
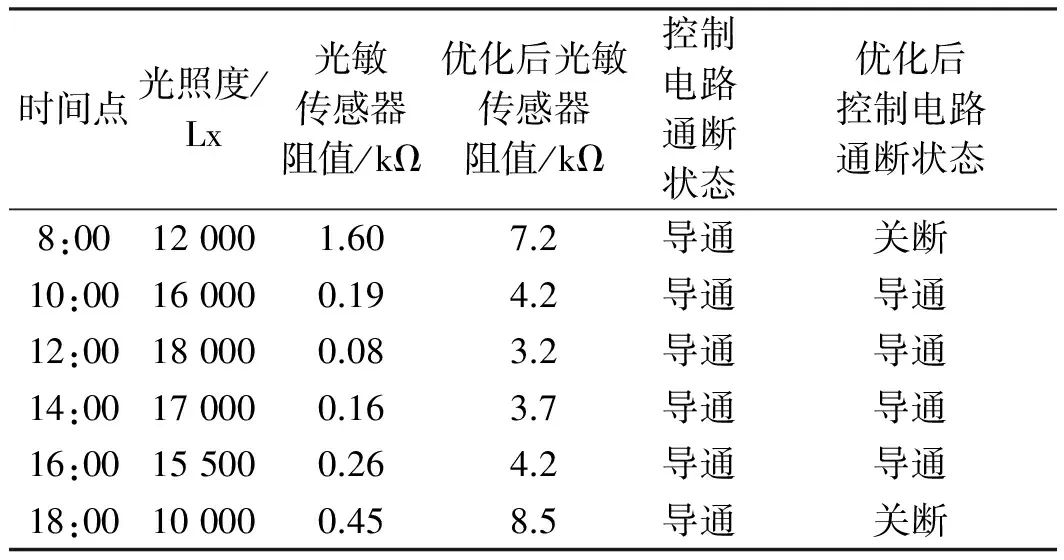
表2 光敏传感器检测
从表2可以看出,光敏传感器阻值在任何时间段和光照度下,控制电路都能保持在一个接通状态,不能满足要求。而优化后的光敏传感器在光照度达到17 000 Lx、10:00—16:00时间段内导通(10:00和16:00,光照度<17 000 Lx),且阻值≤4.2 kΩ(中间阻值<4.2 kΩ)。当在8:00和18:00时,光照度不足,并且这时的光敏传感器阻值大于4.2 kΩ,不足以达到导通的要求,控制电路关断。
2.3 增氧机性能
在同一池塘、同一时间段、同一光照度下,检测改进后和原型机的性能,分别记录叶轮转速、输入电压及电流、水波波长等参数(表3)。由表3可知,在输入电压为24 V时,原型机的转速为35 r/min,波长1.82 m,改进后的转速为34 r/min,波长1.80 m,两者相差不大。但当光照强度不是很高、输入电压为12 V时,原型机的转速比改进后的要快3圈,但改进后的可满足20 r/min的最低转速要求。由输入电压和电流可得到,当输入电压为24 V时,得到控制电压为:
原输入功率为480W,改进后的为444W,优化有效果。

表3 改进前后性能分析
3 讨论与分析
3.1 行走机构
原型机采用挤压式,触碰磁性开关实现换向,有时挤压过度导致不能换向,行程2 m时的运行时间为68.9 s。而改进后使用了陶瓷套管和非接触式换向,减小了钢丝绳的摩擦阻力,磨损明显降低,换向灵敏准确,行程2 m时的运行时间为65.5 s。改进后将小电机放在了保护罩内部,使得结构更加简单,接线更方便。
3.2 控制系统
原型机的控制机构虽然设计合理,但模块较多,维修不方便,改进后实现了最大化精简,通过多次试验和设计优化,保留了原有的控制技术要求,设备安装和维修也得到了简化。同时,在高电压和低电压的情况下,虽然改进后的转速比原型机的慢1~3圈,但转速能满足20 r/min的最低实际应用要求。改进后增氧机控制系统的材料成本(350元)和人工费(500元)只有原型机的一半,实现了设计预期。因此,控制系统设计合理。
4 结论
太阳能增氧机利用太阳能作为能源,运行范围大、运行时间长,一天能够运行6 h左右,符合低碳环保的设计理念。测试结果显示,改进后的结构组成更加简单、接线更方便;用陶瓷套管和非接触换向降低了牵引绳的磨损;控制系统结构简化、元器件简单、维修方便、性价比高;在行走相同距离时,改进后的水面行走机构运行时间短,行走次数多;最低转速达到21 r/min,可满足实际需要。改进后的移动式太阳能增氧机提高了使用效率,降低开发成本。
[1] 王兴国, 王悦蕾, 赵水标. 养殖水体增氧技术及方法探讨[J]. 浙江海洋学院学报(自然科学版), 2004, 23(2):114-117.
[2] AHMAD T, BOYD C E. Design and performance of paddle wheel aerators[J]. Aquacultural Engineering,1988,7(1):39-62.
[3] BOYD C E. Bottom soils, sediment and pond aquaculture[M]. New York: Chapman & Hall,1995:348.
[4] PRASETYANINGSARI I, SETIAWAN A. Design optimization of solar powered aeration system for fish pond in Sleman Regency, Yogyakarta by HOMER software[J]. Energy Procedia,2013,32:90-98.
[5] APPLEBAUM J, MOZES D, STEINER A,etal. Aeration of fishponds by photovoltaic power[J]. Progress in Photovoltaics Research & Applications, 2001,9(4):295-301.
[6] 吴晨,王海燕,骆建波,等.太阳能移动式水体增氧装置的设计与试验[J].渔业现代化,2014,41(4):49-53.
[7] 吴宗凡,程果锋,王贤瑞,等. 移动式太阳能增氧机的增氧性能评价[J].农业工程学,2014, 30(23):246-252.
[8] 田昌凤,刘兴国,张拥军,等.移动式太阳能增氧机的研制[J].农业工程学报,2015,1(19):39-45.
[9] 王慧泉,赵喆,刘鸣.无线遥控电路的原理与应用[J].实验室科学,2007(4):66-68.
[10]彭勇,鲍宏志,刘文立.光敏电阻特性测定及其在自动照明灯中的应用[J].大学物理实验,2002(4):26-27.
Improvement design and test of mobile solar aerator
ZHU Ye,ZHANG Yongjun,TIAN Changfeng,CHEN Chao,ZOU Haisheng,HONG Yang,XING Jingzhu,CHEN Xiaolong
(Key Laboratory of Fishery Equipment and Engineering, Ministry of Agriculture,FisheryMachineryandInstrumentResearchInstitute,ChineseAcademyofFisherySciences,Shanghai200092,China)
In order to improve the efficiency and reduce the developing cost of mobile solar-energy aerators, the Solidworks software was used for the prototype design improvement and performance testing. Through the simplification of the motion control system and use of non-contact type of the water walking mechanism, the back-and-forth walking of the machine became more flexible. Performance test showed that improved mobile solar aerator, when the light intensity was 17 000 Lx, the rotational speed could reach 34 r/min, and the higher the light intensity was, the faster the impeller rotated, also the better the aeration efficiency would be; when the input voltage was 24 V, use 8.2 kΩ and 2 kΩ resistors for dividing, and the control voltage could reach 4.7 V. The sensor optimization results showed that under low light intensity, the selected 4.2 kΩ resistance could meet the speed requirements of 20 r/min at the lowest, remote control distance could reach 45m, and the average running time could be up to about 6 h/d. The electric control system uses the simplest unit module and more convenient water surface running mechanism, not only realizing all the control requirements of the prototype, but also reducing the cost of materials. The results show that the improved aerator is more stable and reliable in performance, and is suitable to be applied in pond aquaculture.
solar energy; aerator device; water walking mechanism; photosensitive sensor; pond
10.3969/j.issn.1007-9580.2016.06.005
2016-07-01
2016-11-19
现代农业产业技术体系建设专项资金 (CARS-46)
朱烨(1990—),男,硕士,研究方向:渔业装备。E-mail:zhuye@fmiri.ac.cn
田昌凤(1985—),女,助理研究员,硕士,研究方向:养殖机械装备。E-mail:tianchangfeng@fmiri.ac.cn
S951.5
A
1007-9580(2016)06-021-06
猜你喜欢
军民两用技术与产品(2021年9期)2021-11-27
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
电脑迷(2020年8期)2020-09-14
港口装卸(2020年3期)2020-06-30
西安航空学院学报(2020年1期)2020-06-01
现代营销·理论(2019年10期)2019-09-10
渔业致富指南(2019年19期)2019-01-06
电子制作(2017年7期)2017-06-05
现代兵器(2016年4期)2016-04-27
